回转式机械手机械系统的设计毕业论文
2020-05-28 07:01:25
摘 要
在当今社会制造生产过程中,机械手的运用程度成为衡量制造工厂自动化水平的一个重要指标。机械手的运用,使得人类的双手从繁复的重复性工作中解放出来,提高了生产效率以及生产的可靠性。同时也能在某些极端环境中,如:高温、高压、真空、毒性等,用机械手来代替人直接与这些极端环境接触,使得工人免于人身伤害。机械手在工业生产的各个环节都显示出无可比拟的竞争优势,因此在制造生产过程中得到了广泛的认可。本文讲述了基于圆柱坐标条件下的回转式单臂机械手的机械系统设计,该设计属于主要用于教学目的的机械模型。对机械手的要求是:在00到1800范围之间,将一个重500g的金属块从一个平台移至另一个平台。基于上述的使用条件以及使用目的,我们选取结构较为简单的圆柱坐标机械系统,夹持部分使用电磁吸附式抓手。考虑到教学目的工作的环境,我们选取较为清洁的气压传动方式。本次设计中机械手机械部件的动作单一,整体结构简单,较高的可靠性,易于装配,适用于机械设计、气压传动等相关课程实验教学中的原理解释和装拆练习。
关键词:机械手 气压釭 圆柱坐标 电磁吸附
The design of the mechanical system of the Rotary Manipulator
Abstract
In the process of manufacturing production in today's society, the degree of application of the manipulator is an important indicator to measure the level of automation in manufacturing plant. The use of manipulator, liberate human hands from the complicated repetitive work and improve the production efficiency and production reliability. At the same time, in some extreme environments, such as high temperature, high pressure, vacuum, toxicity and so on. Due to the replacement of the direct contact with these extreme environments, the workers are protected from injury. The use of manipulator in all aspects of industrial production have shown unparalleled competitive advantage, so in the manufacturing process has been widely recognized. This paper describes the design of mechanical system based on cylindrical coordinates considering the condition of the use of manipulator. The design is mainly used for the mechanical model of teaching objective. The requirements of the manipulator: range from 00 to 1800, move a 500g metal from one platform to another platform. Based on the use condition above, we select the relatively simple structure of cylindrical coordinate manipulator system, and the clamping part using the electromagnetic absorption type starting point. Taking the teaching purpose of the work environment into consideration, we select a more environmental pneumatic transmission. The manipulator movements in this design is simple, simple structure, high reliability, easy assembly, so this design is suitable for mechanical design, pneumatic transmission and other related courses in the experimental teaching of the principle , assembly and disassembly practice.
Key words: Manipulator Pressure candle Cylindrical coordinates Electromagnetic absorption
目录
摘 要 I
Abstract II
第一章 引言 1
1.1概述 1
1.2工业机器人-机械手简介 1
1.2.1当前机械手的应用 1
1.2.2机械手常用结构及其特点 1
1.2.3回转式机械手的结构 2
1.2.4现阶段机械手的发展特点 4
第二章 设计任务 5
2.1本设计要解决的问题 5
2.2研究该课题采用的手段 5
第三章 回转式机械手机械系统的设计 6
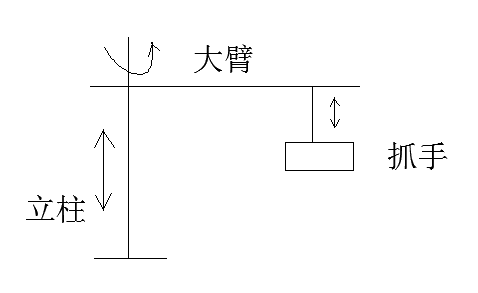
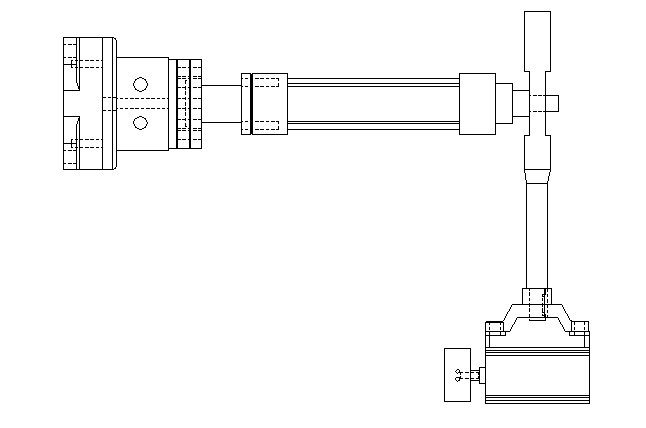
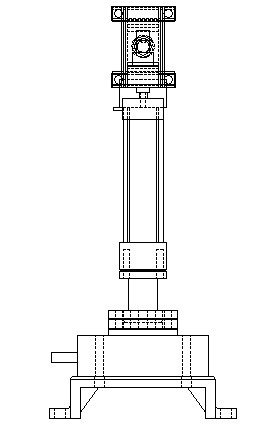
3.1机械手结构总图的设计 6
3.2机械手立柱部分的设计与校核 10
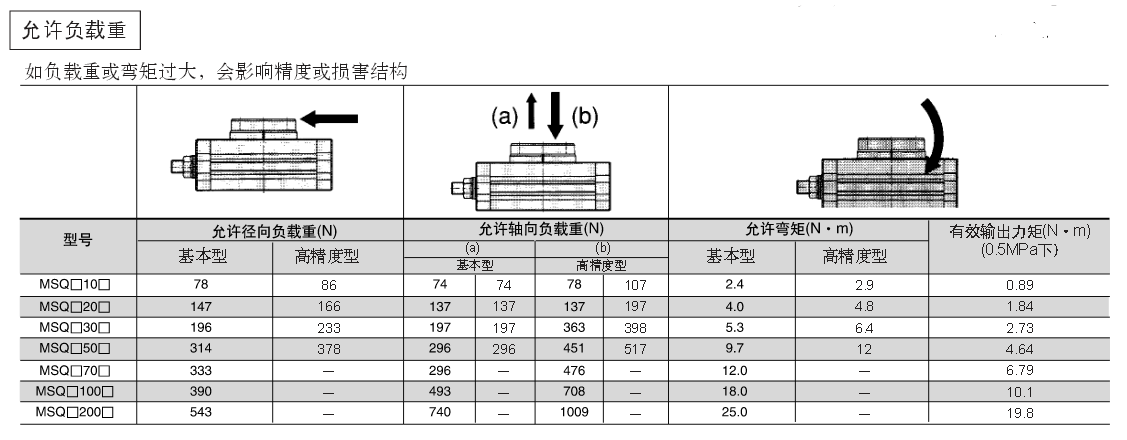
3.2.1立柱回转缸选型与校核 10
3.2.2立柱气压缸选型与校核 11
3.2.3气压缸与回转缸连接法兰的设计 13
3.3机械手底座部分的设计与校核 14
3.4机械手大臂部分的设计与校核 15
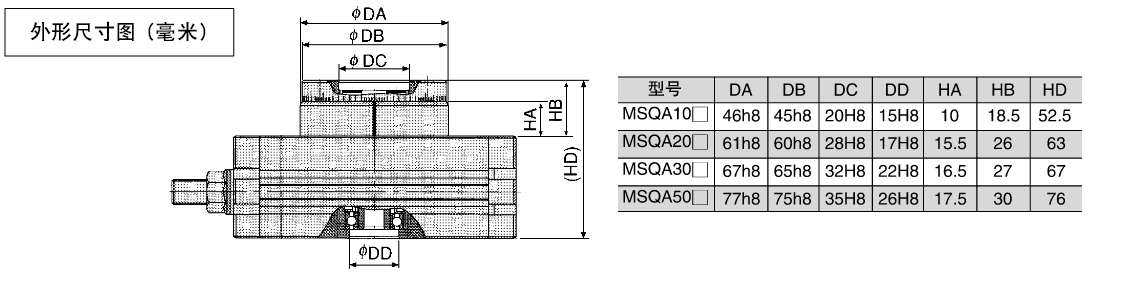
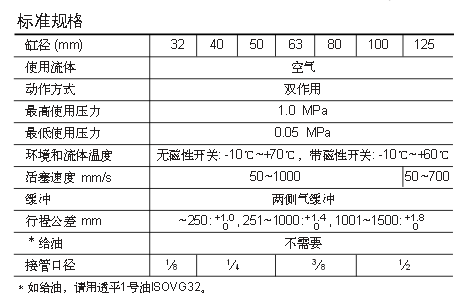
3.5机械手抓手气缸的选型与校核 16
3.6机械手抓手气缸支架的设计 18
3.7机械手抓取部分的设计与校核 19
第四章 机械手的三维建模与动态仿真 21
4.1 PRO-E软件基本简介 21
4.2PRO-E三维建模 21
结语 22
参考文献 23
谢辞 25
第一章 引言
1.1概述
机械手是工业机器人的一种,也是目前运用最为广泛的一种工业机器人,与其他类型的机器人不同,机械手只仿照人的手部进行工作。它是一门由电子技术、自动控制技术和机械设计相结合的一门学科[1]。与上个世纪初的机械不同,机械手采用了先进控制系统,机械手可以在人的指令下进行预期的动作,通过控制系统(目前运用最广泛的的PLC控制系统)来进行预计轨迹的运行。在食品及药品的生产、机械加工、电子元器件的加工、普通制造业、汽车零件生产及组装等领域,机械手得到了越来越广泛的运用[1]。机械手的广泛应用减轻了工人的劳动负担,并且胜任于某些人难以适应的极端工作环境,如高温、毒性、超重等等。机械手可以大大提高工作效率,合理有效的节约资源,弥补了其他工作方式存在的缺点,迎合了现代化制造生产技术的大环境[2]。
1.2工业机器人-机械手简介
1.2.1当前机械手的应用
按照自动化程度的不同机械手可分为自动化和半自动化机械手[3],伴随着计算机技术的进步,工业机械手的自动化程度不断提高,有朝着高精度、高安全性、高友好型发展的趋势[4],例如医院手术、军事排爆、火场救援等追求高精度或须在恶劣环境中执行的一系列生产活动。虽然机械手算不得一门新兴行业,但其在工业生产和日常生活中所占有的比重越来越大,逐渐成为生产生活中不可或缺的一部分。[5]
1.2.2机械手常用结构及其特点
机械手主要有直角坐标式,圆柱坐标式,球坐标式,关节式等四种结构形式[6]。
(1)直角坐标式。直角坐标式机械手在三维空间的运动轨迹,是围绕X\Y\Z三个坐标方向的直线运动合成来实现的,如图l-2-1a,直线运动比较容易实现闭环的控制,因此,直角坐标式的机械手比较易于实现较高的位置精度(可达到μm级)。
相关图片展示: