智能挖掘机器人控制系统的硬件设计毕业论文
2020-06-20 19:17:08
摘 要
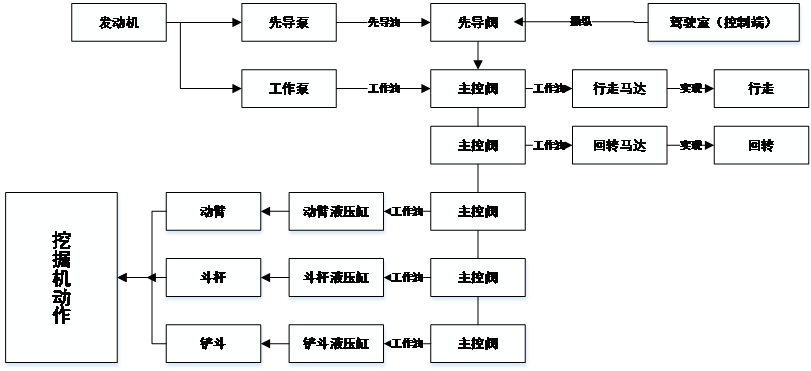
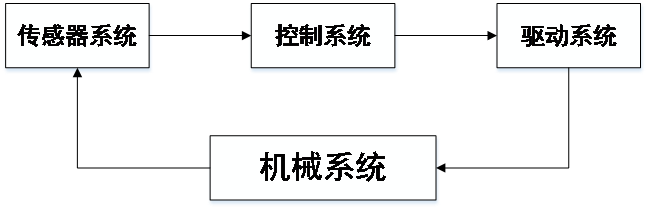
液压挖掘机是一种机构复杂、用途广泛的工程机械,主要应用在工业、建筑及军事等大型领域。然而,随着挖掘机工作现场环境的复杂性变化以及挖掘作业要求多样性的增加,液压挖掘机的自动化和智能化方向已逐渐成为高端装备的技术发展趋势。本文针对挖掘机智能挖掘的要求,设计出了智能挖掘机器人的控制系统的硬件系统,实现传感器、控制器及执行机构之间的信号传递。主要工作如下:
论述了国内外挖掘机智能化研究的现状;分析了液压挖掘机的机构和工作原理;提出了控制系统总体方案设计,以选用的单片机作为控制模块,完成了挖掘机控制系统硬件的选型及连接。
关键词:智能挖掘机 控制系统 硬件设计 单片机
Hardware Design of Intelligent Excavation Robot Control System
ABSTRACT
Hydraulic excavator is a complex and widely used construction machinery, mainly used in industrial, construction and military fields.However, with the complexity of the environment of the excavator work environment and the increase of the excavation operation requirements, the automation and intelligent direction has gradually become the technical development trend.In this paper, according to the requirements of intelligent excavation, the hardware system of intelligent control robot is designed to realize the signal transmission between sensor, controller and actuator.The main research work are as follows:
The current situation of the intelligent research of excavator both at home and abroad are discussed, the mechanism and working principle of hydraulic excavator is analyzed,puts forward the overall design of the control system, uses the 51 single chip as the control module, completes the excavator control system hardware Selection and connection.
Keywords :Intelligent excavator;Control system;Hardware design;Single chip processer
目 录
摘 要 I
ABSTRACT II
第一章 绪论 1
1.1选题的背景及意义 1
1.2智能挖掘机的国内外发展状况 1
1.3本文研究的主要内容 3
第二章 挖掘机组成 4
2.1挖掘机基本机构 4
2.2挖掘机的工况分析 4
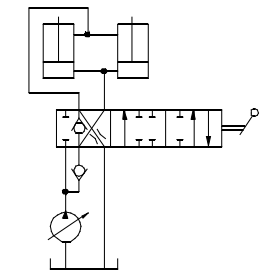
2.3液压挖掘机的液压系统 6
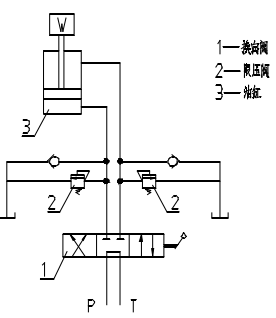
2.4限压回路 7
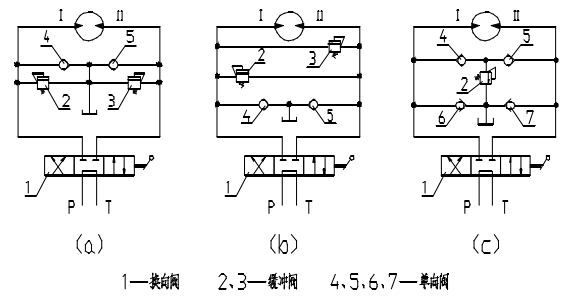
2.5缓冲回路 8
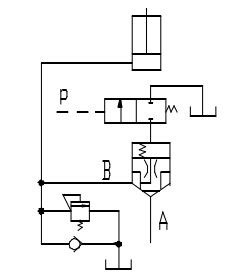
2.6节流回路 9
2.7闭锁回路与再生回路 9
第三章 挖掘机控制系统总体方案 11
3.1 AT89S单片机(控制端) 12
3.2传感器 14
3.3转换器 16
3.4电液比例阀 19
3.5电路图 19
第四章 总结 20
4.1 全文总结 20
4.2 工作展望 20
参考文献 22
致 谢 24
第一章 绪论
1.1选题的背景及意义
挖掘机的出现代替了大量的人力劳动,使人类从繁重的体力劳动中解放出来,大大的提高了工作效率,被广泛的应用在交通运输、工业及建筑业等各个领域。然而挖掘机的工作环境比较恶劣,操作费劲,驾驶室的舒适性也毫无保证。在有毒气、高温、易崩塌等恶劣环境中,操作者的安全和健康受到了严重的威胁,使得挖掘机的应用受到了很大的限制。因此,长期以来人们一直在谋求更高效、更省力的智能化挖掘作业模式[1][2]。
2003年国家正式立项“863”计划,将挖掘机机电一体化技术和信息化作为技术开发提升的重点,2011年颁布的中国工程机械“十二五”发展规划中重点提出[3]:工程机械实现智能化工程,提高智能化控制是工程机械行业技术发展的重要等等,提升国产智能化知识产权,掌握核心技术,对于缩短与国际一流品牌制造业的差距,提升我国挖掘机品牌在国内以及国外市场的影响率和占有率有着重要的意义。
1.2智能挖掘机的国内外发展状况
19世纪40年代在美国西部发铁路建设时期开始出现挖掘机的雏形,以蒸汽机作为动力,基本构件为铲斗、动臂和斗杆的工作装置[4]。后来随着汽油机和柴油机在车辆上的成熟应用,挖掘机也开始采用汽油机和柴油机驱动;由于液压技术的应用,20世纪40年代有了在拖拉机上配装液压反产的悬挂式挖掘机,20世纪50年代初期和中期相继研制出拖式全回转液压挖掘机和履带式全液压挖掘机。初期试制的液挖掘机是采用飞机和机床的液压技术,缺少适用于挖掘机各种工况的液压元件,制造质量不够稳定,配套件也不齐全。从20世纪年60代起,液压挖掘机进入推广和蓬勃发展阶段,各国挖掘机制造厂和品种增加很快,产量猛增,随着液压技术的不断成熟[5],液压传动逐渐取代机械传动被应用到挖掘机上来,到70年代,挖掘机总产量的90%都是液压挖掘机;而近年来[6]机电液一体化、智能化控制技术的发展与应用,又将实现挖掘机发展史上的新的飞跃。
1.2.1国外挖掘机的发展和概况
如何提高挖掘机器人的操作性能,使挖掘机更好更快的完成工作,国外的研究成果相对于国内更加成熟。尤其是计算机技术的发展与应用,促进了挖掘机研发的创新设计[7],有限元分析的方法(FEM)、结合虚拟样机技术、动态分析等现代化设计理论被广泛应用到挖掘机工作装置设计中来。
Carnegie Mellon大学的自主装载系统 研究[8];澳大利亚机器人中心的自主挖掘研究[9];英国兰卡斯特大学的智能挖掘机研究[10]等等,为延伸挖掘机在更加复杂、恶劣、危险的环境中作业研发了重要成果;
相关图片展示: