300X72型仓库堆垛机行走机构及旋转机构的设计毕业论文
2020-06-20 19:25:40
摘 要
自动化立体仓库因其存取方便,工作效率高、多层化存储等优点,已被作为一种当代物流的标杆式的发展现象。堆垛机是自动化立体仓库系统中极为重要的起重、输送组件,它直接承担每天繁忙的货物出入库责任。随着自动化立体仓库在工业仓储中起着不可替代的作用,分析堆垛机的各个行动过程是本文的重点。
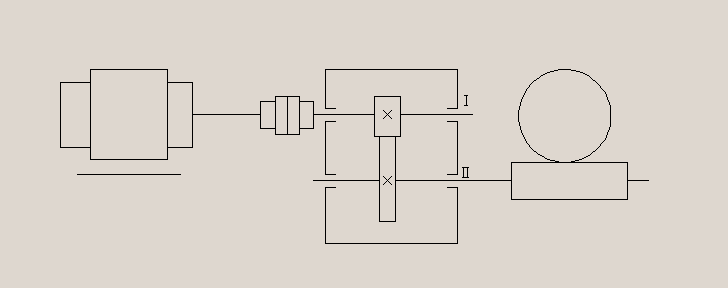
本论本论文经过消化往年很多文献资料以及研究经验的基础上,分析了本论题现阶段的发展情形。采用有轨巷道立柱式堆垛机,文章前期讲述自动化立体仓库的基本组成,如货架,堆垛机,控制系统等,特别是对于堆垛机的结构运动进行分析研究。主要有四个部分组成,行走机构、旋转机构、上升机构和伸缩机构。主要对应的运动原理是齿轮齿条传动、蜗轮蜗杆传动、丝杠螺母传动以及齿轮齿条传动。在对这几个部分进行计算,通过导师所给的不同的数据计算各个机构主要零件参数,在进行校核对比。
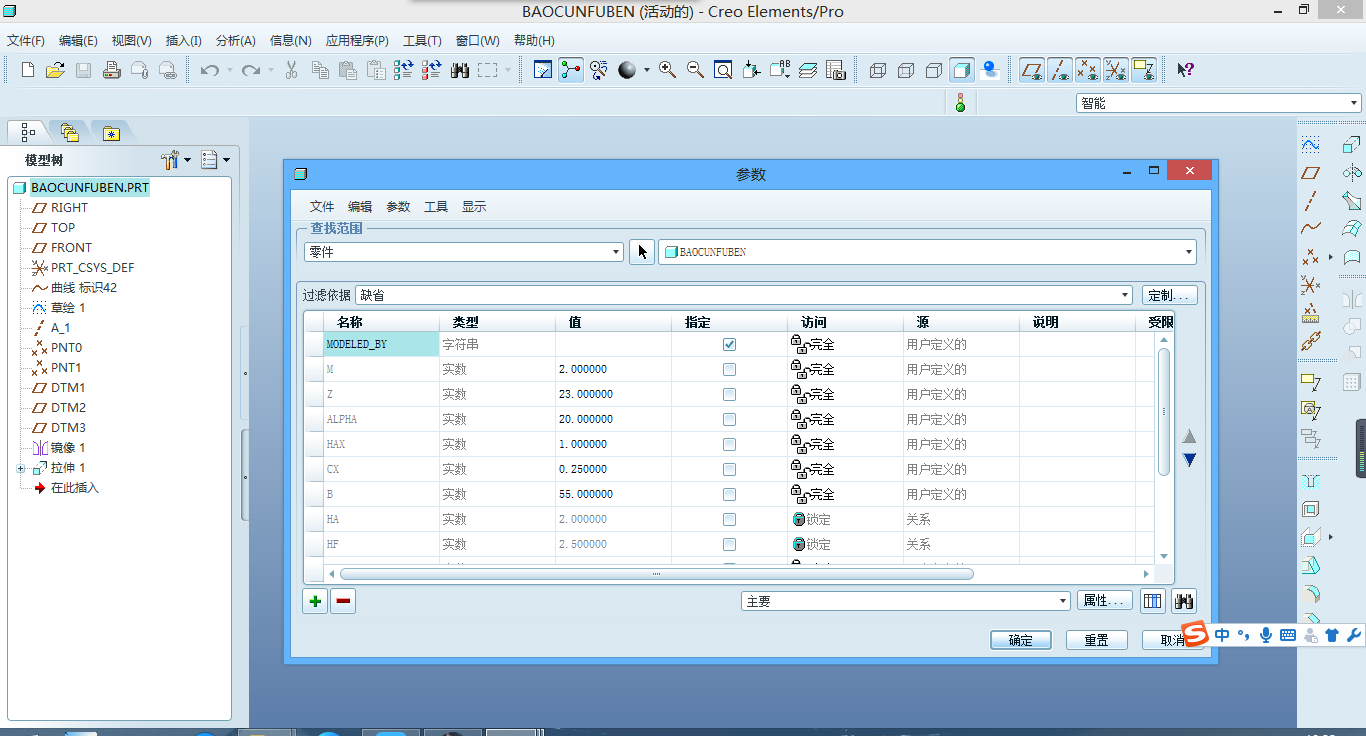
本论文后期是对堆垛机的各个组成部分进行建模与仿真,通过ProE软件,根据各个零件参数对各个零件进行建模再组合形成一个完整的三维动态模型。
关键词:自动化立体仓库 堆垛机 蜗轮蜗杆传动 齿轮齿条传动 Proe建模
The design of 300 * 72 walking mechanism and rotating mechanism
Abstract
Automated warehouse because of its convenient access, high efficiency, multi-layered storage, etc., has been used as a benchmark for the development of contemporary logistics. The stacker is an extremely important lifting and conveying component in an automated warehouse system, which directly takes on the responsibility for the daily arrival and unloading of goods. With the automation of three-dimensional warehouse in the industrial storage plays an irreplaceable role in the analysis of the stacking machine of the various action process is the focus of this article.
On the basis of digesting many literatures and research experiences in previous years, this paper analyzes the development of this topic at this stage. The basic structure of the automated warehouse, such as the shelves, the stacker, the control system and so on, especially the structural movement of the stacker, are analyzed and studied in the early stage of the roadway stacking machine. There are four main components, walking mechanism, rotating mechanism, lifting mechanism and telescopic mechanism. The main principle of the corresponding movement is the rack and pinion drive, worm gear drive, screw nut drive and rack and pinion drive. In the calculation of these parts, through the different data given by the instructor to calculate the main parts of the various components of the parameters, in the comparison and comparison.
At the end of this paper, the various components of the stacker are modeled and simulated. Through the ProE software, all the parts are modeled and reassembled to form a complete three-dimensional dynamic model.
Key words: automated warehouse ; warehouse stacker ; worm gear drive; gear rack drive; Proe modelin
目录
第一章 绪论 1
1.1自动化立体仓库的概念 1
1.2自动化立体仓库的发展 1
1.3本论文的主要工作 2
第二章 总体设计 4
2.1货架的设计 4
2.2堆垛机 4
2.2.1水平方向运动 4
2.2.2货叉伸缩机构绕Z轴的旋转方向 4
2.2.3垂直方向的运动 5
2.2.4存取货物方向上的伸缩运动 5
2.3堆垛机成本核算 6
第三章 行走机构的设计 7
3.1电机的选择 7
3.2直齿圆柱齿轮减速机构的设计 9
3.3圆锥齿轮的设计 13
3.4齿轮齿条的设计 16
3.5轴系部件设计 18
第四章 旋转机构 19
4.1电机的选择 19
4.2直齿圆柱齿轮减速箱的设计 20
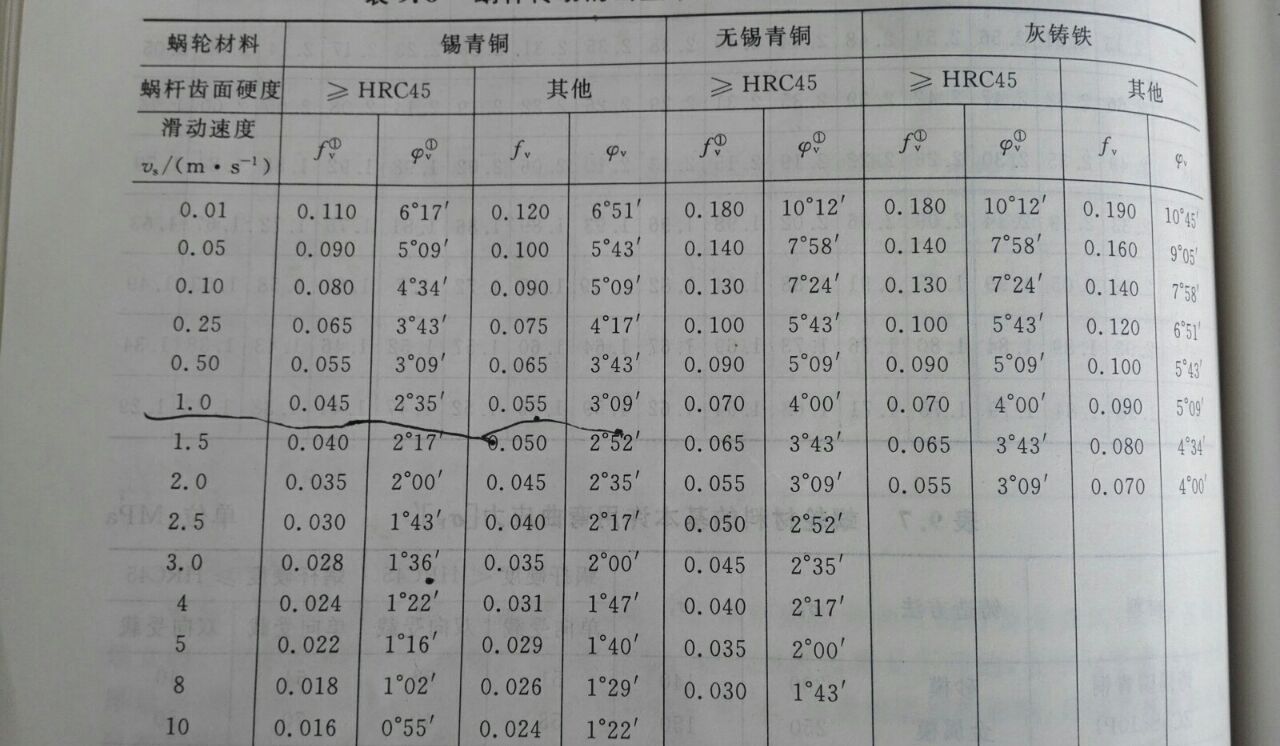
4.3蜗轮蜗杆的计算 24
4.4轴系部件设计 29
第五章 机构三维建模和运动仿真 30
5.1 Proe简介 30
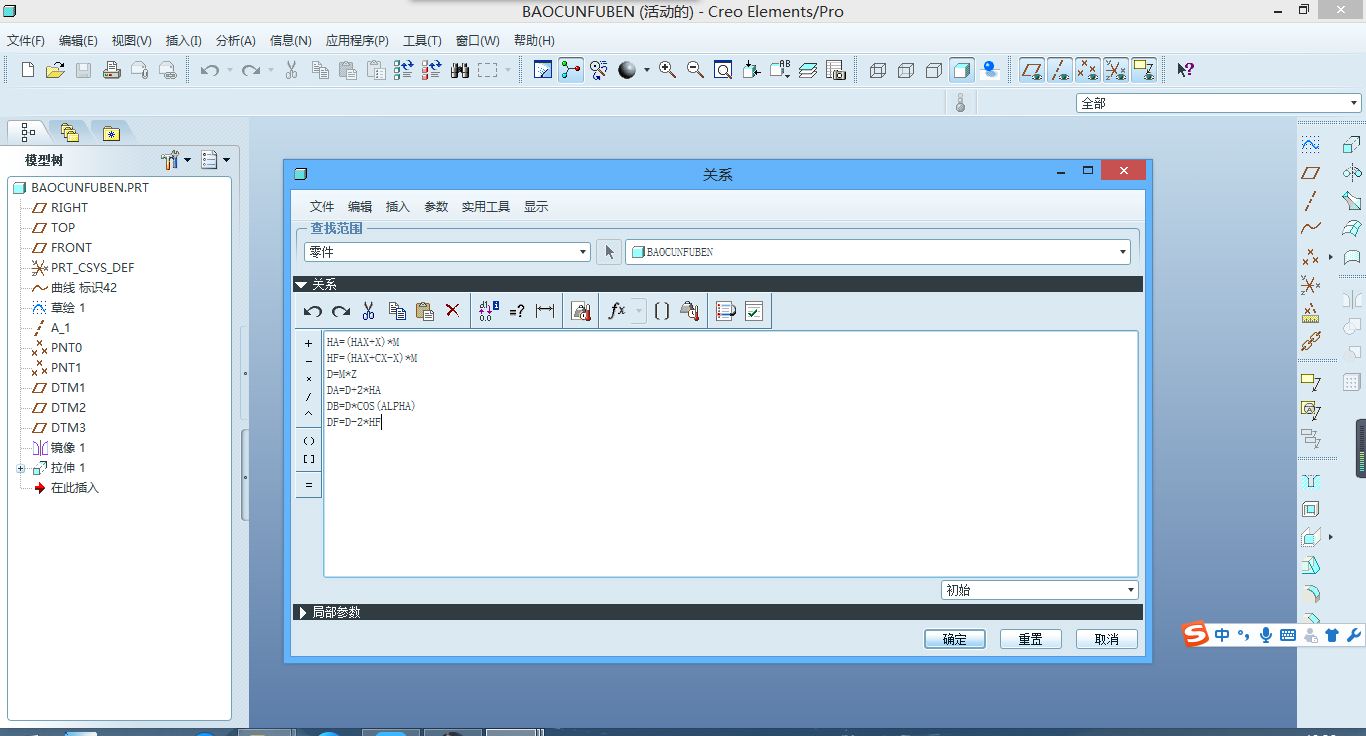
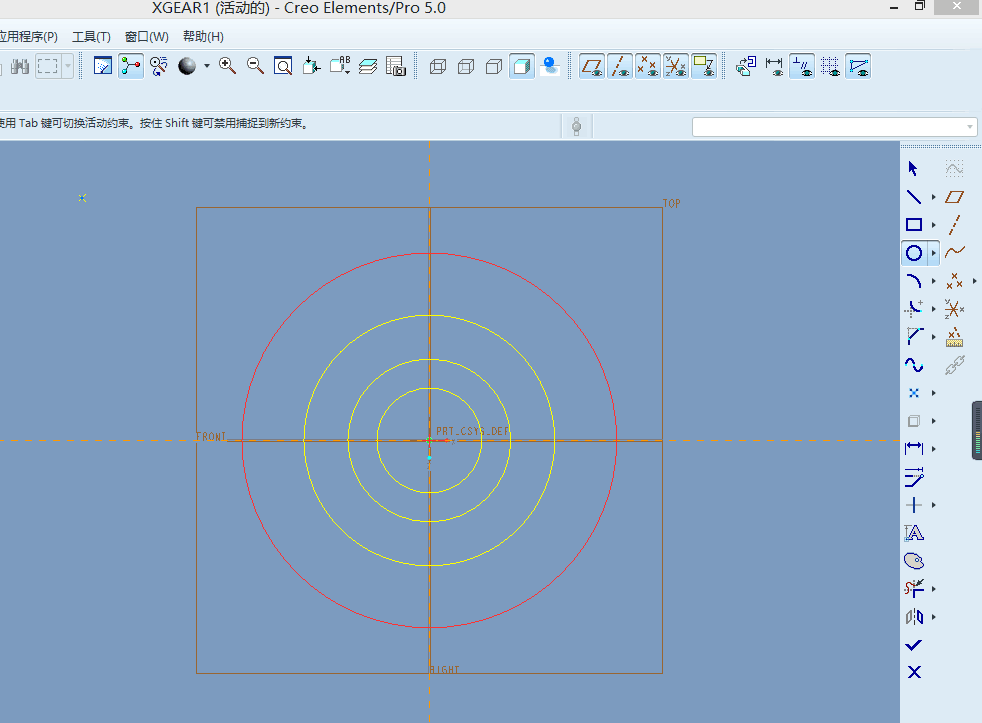
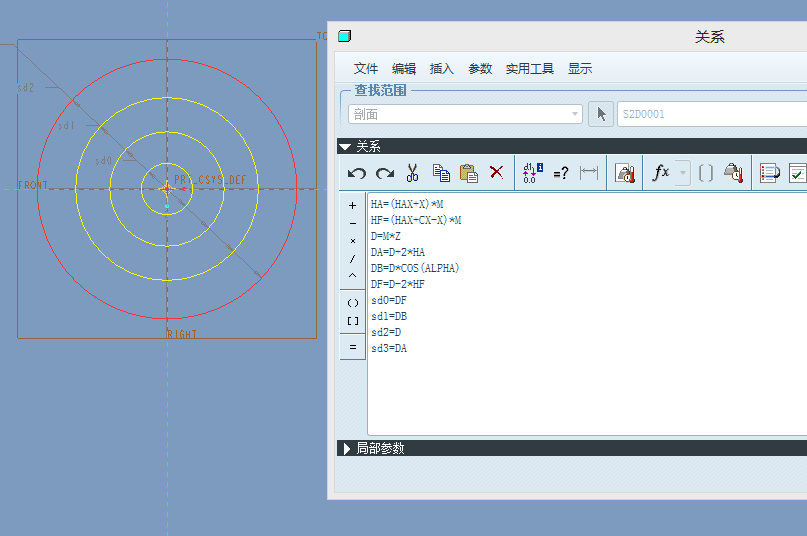
5.2变速箱齿轮的建模 30
5.2.1行走机构变速箱齿轮的建模 30
5.2.2齿条的建模 38
5.2.3锥齿轮的建模过程 40
5.2.4滑块的建模 41
5.3行走机构的装配 42
5.4旋转机构的建模过程 43
5.4.1蜗杆的建模 43
5.4.2涡轮的建模 45
5.4.3蜗轮蜗杆的装配 49
总结与展望 51
参考文献 52
致谢 54
第一章 绪论
1.1自动化立体仓库的概念
由于经济的快速腾飞,市场对物流企业的依赖我越来越大,自动化立体仓库应运而生。它是一种高效率、大容量、智能化、机械化的仓储系统,是一种新技术运用的集大成者,如高层货架,自动化堆垛机,现代计算机控制技术。他的出现,大幅度缓解了企业因仓库数量有限导致货物积压、流动速度慢的状态。已然存在成为一种商品运输中枢的趋势。
1.2自动化立体仓库的发展
自从有了生产作业,仓库也是必不可少的配套设施,从农耕文明存储粮食到商业时代存储货物,它是跟随着生产力的进步而逐步改善。上世纪四十年代,电子计算机诞生美国,他的到来给人类的生产生活带来了翻天覆地的变化,各种基于计算机的发明层出不穷,自动化仓库就是其中一种出现在上世纪五十年代末期集合计算机应用的工业化产品,它是工业发展的加速器。更是企业实现智能化管理的重要手段。
人类对自动化仓库的研究是随着科技生产力进步而不断地对他进行完善,时至今日,他的改变已经跨过了好几代的产品。第一代仓储系统是人工仓储形式,顾名思义,他的运作流程离不开工人对他每时每刻的操作。是一种体力劳动为主的方式。他需要人工搬运,人工记录,但是效率低下,产品流动性差的缺点,但是经济性和技术性适合当时人类的发展层次。第二代是机械运输模式。在这一时代,仓库并不需要大量的劳力进行搬运,工人可以通过叉车,吊机,传送带等机械设备对货物进行搬运,基本走进一种半机械化模式,这一步是仓库发展重中之重,他将仓库由体 力劳动运作转化为机械运动运作,以后的几代发展都是为了更高效的进行机械运作过程而发展的。第三代仓储系统初步实现了自动化的工作流程。由于计算机科技的发展,科学家将其应用到各式各样的机械工具的发明上,原来的机械化工具逐渐被自动化工具取代如自动化的牵引车,货架,存取机器人等。因为这座仓库实现基本单元的部分自动化,所以说这可以说是世界上第一座真正意义上的自动化立体仓库,也可以称为半自动化。从上述分析可以推测,为了实现真正的自动化肯定不可以只追求局部,第四代自动化仓库就是将这些局部自动化组件组合起来,成为全自动化整体。得益于当时计算机的高速发展,已经走进了大规模集成电路的时代,正如伟人邓爷爷所言,科技是第一生产力。早有先见之明的科学家将此计算机投入到仓库的研究当中,将各个部分的控制系统集成化,造出世界上第一台完全自动化立体仓库。这更加促进了商业的发展,从而又反向推进了自动化仓库在全世界的迅速风靡建立,他的使用更是涉及到当代各行各业的生产之中。第五代仓库现在还在初步试验当中,正如现如今正流行的阿尔法狗一样,在自动化的基础上逐步实现智能化才是更加有利于人类发展的科技。不过现阶段这一过程还需要很多专家学者的投入,相信在不就得将来,智能化立体仓库可以成为我们本科生研究的毕业设计。
1.3本论文的主要工作
(1)货架的设计
本论文选用的是立体货架,他的主要参数是300X72型,选用厚度为5毫米的钢板只做成 的框格。
的框格。
相关图片展示: