仿生爬壁机器人足部接触力信号处理毕业论文
2020-02-19 07:51:30
摘 要
为了实现仿生爬壁机器人足部力的感知,本文对当前机器人使用的触觉传感器进行了调研,选择了合适的传感器,将其与仿生爬壁机器人的抓附机构结合,搭建了一个简单的足部力采集系统。在硬件方面,对传感器进行标定,以STM32单片机为控制核心,通过传感器完成力信号的采集,并将其显示在LCD屏上;在软件方面,使用C语言编写程序,完成信号的A/D转换与显示。在实验方面,采用两种不同的方案对选择的足部传感器进行切向力和法向力的测试。通过分析对比两种方案的测量性能,表明该力采集系统在足部力的感知上具有一定的准确性,验证了力采集系统的妥当性和实用性。所得结果对于实现具有力反馈效果的仿生爬壁机器人来说具有重要意义。
关键词:仿生爬壁机器人;触觉系统;力感知;STM32
Abstract
In order to realize the force sensing of bionic wall climbing robots, a survey of tactile sensors for robot applications has been carried out in this thesis. Then, an appropriate sensor is chosen to integrate with the grasping mechanism of a wall climbing robot to construct a simple foot force acquisition system. In the aspect of hardware design, a STM32 microprocessor works as a controller, meanwhile, force signals are gathered via calibrated sensors and then showed on a LCD screen. While in the software part, the A/D conversion and display of data are programmed in C language. Shear forces and tangential forces are measured by the foot sensors in two different ways, whose performance is compared, showing the accuracy of the force sensing. The feasibility and practicability of the force acquisition system is validated in the experiment. It is demonstrated that this research is valuable in realizing the force feedback of bionic wall climbing robots.
Key words: bionic wall-climbing robot; tactile system; force sensing; STM32
目 录
第1章 绪论 1
1.1 选题背景及研究的目的与意义 1
1.2 国内外研究现状 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 3
1.3 研究内容、预期目标与论文框架 4
1.3.1 研究内容 4
1.3.2 预期目标 4
1.3.3 论文框架 5
第2章 机器人用力触觉传感器综述 6
2.1 触觉传感器分类 6
2.1.1 电容式触觉传感器 7
2.1.2 电感式触觉传感器 9
2.1.3 光学触觉传感器 10
2.1.4 压阻式触觉传感器 12
2.1.5 压电式触觉传感器 13
2.1.6 磁敏式触觉传感器 15
2.2 机器人触觉系统面临的挑战 17
第3章 仿生足结构与足部模型建立 19
3.1 仿生足的结构 19
3.2 仿生爬壁机器人足部模型建立 19
3.2.1 单根爪刺与壁面接触模型 19
3.1.2 足部模型建立 20
第4章 足部力采集系统硬件设计 23
4.1 系统结构 23
4.2 电源模块 23
4.2.1 传感器、舵机供电电路 23
4.2.2 PCB板供电电路 24
4.3 力传感模块 25
4.3.1 切向力的测量 25
4.3.2 法向力的测量 27
4.4 信号处理模块 29
4.5 控制模块 29
4.5.1 STM32微处理器 29
4.5.2 时钟电路 31
4.5.3 复位电路 31
4.5.4 JTAG下载电路 32
4.5.5 USB转串口通信电路 33
4.6 显示模块 33
4.7 检测系统集成电路板 34
第5章 足部力采集系统软件设计 36
5.1 系统程序流程图 36
5.2 初始化程序 36
5.2.1 时钟初始化 37
5.2.2 IO口初始化 37
5.3 A/D转换 38
5.3 数据的显示 40
第6章 单足力采集系统实验验证 42
6.1 传感器的标定 42
6.1.1 切向力的标定 43
6.1.2 法向力的标定 45
6.2 切向力测量特性分析 47
6.2.1 正方向切向力的测量 47
6.2.2 负方向切向力的测量 51
6.3 法向力测量特性分析 54
6.3.1 正方向法向力的测量 54
6.3.2 负方向法向力的测量 57
6.4 力数值的显示 61
6.3.1 正方向切向力的显示 61
6.2.2负方向切向力的显示 61
6.2.3 正方向法向力的显示 62
6.2.4 负方向法向力的显示 63
6.5 误差分析 64
6.5.1 无干扰时误差情况分析 64
6.5.2 重力分量对切向力测量的影响 66
6.5.3 偏转角度对法向力测量的影响 68
第7章 总结与展望 69
7.1 总结 69
7.2 未来展望 69
参考文献 71
致谢 75
绪论
1.1 选题背景及研究的目的与意义
在工业现场及许多应用场景下,有许多任务由于操作位置特殊及安全性较差,不能由人类操作人员直接执行,因此爬壁机器人进入了人们的视线。爬壁机器人可在墙壁、天花板、屋顶等二维或复杂三维环境完成各种任务,是提高工作效率、保护人身安全的绝佳选择,可广泛应用于高层建筑的清洁和检查, 核电站及石化设施的储罐的评价与诊断,船体焊接与维护等场景[1]。传统爬壁机器人抓附表面的方式包括吸盘和真空吸附[1-3]、静电或磁引力吸附[1-3],以及利用涡流产生的负压吸附等方式[3-4],这些方法都有很多实际应用上的缺陷,比如,真空吸附和电磁吸附无法适应砖、混凝土、灰泥或石头等多孔和布满灰尘的外表面;而利用涡流产生的负压吸附则会产生较大的噪音,同时使用该方式需要电源持续供电,从而导致机器人的续航能力不足。
目前,很多研究人员将目光转向了壁虎和昆虫等节肢动物,受其启发,研究适用爬壁机器人的仿生粘附系统。壁虎及昆虫足部的刚毛可以产生很强的范德华力。其中,大壁虎足部大约有5000 mm-2 的刚毛,共约五十万根,覆盖了100 mm2的区域,可产生10 N左右的粘附力[5]。研究人员使用小块的毛发附着在机器人足部进行模拟,通过范德华力提供干附着的机制[1][4][6-8]。由于干粘附主要使用分子间的作用力,所以几乎适用于所有表面。仿生物附着机理研制的爬壁机器人抓附壁面的动作十分迅速,且能耗低,可以在陡峭和崎岖的表面爬行,在任何方向上都可以快速平稳地移动,因此在军事侦察、紧急救援、行星探索,以及在失重环境中的航天器维护等领域具有十分广阔的应用前景。
触觉系统是仿生机器人感知周围环境的核心系统。从功能的角度来看,触觉传感器可按照所感知的接触触觉、力、力矩、压力、表面滑动情况划分成不同的类别,可以感知接触物体的大小、结构、形状及接触位置的温度、硬度、压力等信息,并将其转化为电信号传递给控制模块,在工业制造、假肢设计、可穿戴电子设备等领域的应用十分广泛。目前,智能机器人、人工智能、虚拟现实等技术正快速发展,触觉传感器也向全局化测量、多维力测量及小型化、智能化、网络化方向发展。
对于仿生爬壁机器人而言,在足部加入力采集系统进行力的感知具有很大的现实意义。力的感知需要在不同的方向具有一定的测量范围,具有多轴力检测效果,能够检测到机器人足部是否发生打滑,据此纠正机器人的动作,使得机器人保持直立,这也是本课题的研究目的。目前,仿生机器人大多采用开环控制,而实用的足部力采集系统对于仿生爬壁机器人闭环控制的实现具有重要意义,带有力采集系统的足部可以大大简化机器人硬件结构,从而在保持高灵活性的基础上大幅削减成本。目前,实际应用机器人的力感知系统远远落后于动物的感知水平,足部力感知在仿生机器人的研发领域依旧处于一个十分重要的地位。
此外,爬壁机器人的发展对力的感知提出了新的发展需求,不仅需要较为准确的测量结果与较高的灵敏度,还需要测量系统在不规则的复杂表面的适应性,即具有一定的柔性。
1.2 国内外研究现状
1.2.1 国外研究现状
目前国内外触觉系统的研究既有单轴力检测,也有多轴力检测,但仍然难以满足仿生爬壁机器人的需求。
国外仿生爬壁机器人及其触觉系统的研究起步较早。
美国RiSE(Robots in Scansorial Environments)项目组由国防高级研究项目局(DARPA)建立,隶属生物动力学项目部。2005年,该项目组的Asbeck等人发明了仿生微型尖刺,并将其用于机器人的足部,通过排列数十或数百个微刺,可以支撑并分担大的负载,从而开发利用范德华力粘附表面的仿生机器人。2008年,六足仿生爬壁机器人RiSE开始采用内置到腿部下侧的应变式负荷传感器测量足部的法向力和切向力,精确到0.25 N;同时使用霍尔传感器测量沿腿轴的被动柔性偏转,以测量第三轴的力,精确到0.5N [4]。2009年,第三款RiSE机器人使用角度传感元件来测量变速器的偏转,既可以为系统提供精确的足部位置测量,也可以提供足部力的测量[9]。
2013年,Aaron Parness等人为了满足在太阳系中探索星体时的攀岩需求,研发了LEMUR IIB[10]。在该项研究中,他们建立了一个解析运动学模型,通过微刺托架的角度和线性位置得到微刺托架所承受的力。因此,可以使用角度传感器和线性传感器来完成测量。角位置传感器使用串电位器和比例霍尔效应传感器。当托架通过其角度范围时,串电位器钢丝延伸并改变输出电压。霍尔传感器与永磁体配对,当托架穿过,其霍尔传感器和永磁体之间的距离发生变化,导致输出电压发生变化。线性传感器使用测压元件和霍尔传感器。测压元件与钢丝和弹簧相连,直接测力。线性霍尔效应传感器测量嵌入的一个小磁条的位移,南北极交替,增量为2.4 mm。当这些极在芯片下面移动时,芯片的五个霍尔传感器上产生了正弦波电压,编码成正交输出以捕捉移动的距离和方向。
2015年, Luther R. Palmer III等人使用分布式内抓的仿生策略(DIG)研发了六足仿生爬壁机器人DIGbot[7]。如式(1.1)所示,在足部刚刚接触到墙壁表面时,DIGbot使用准静态的电流反馈来近似关节力矩τ,同时使用雅可比矩阵的转置来计算每条腿的抓力。式中,F是机器人足部施加的力,是一个3×1的矩阵;J是雅克比矩阵。该方法在慢动作的准静态环境下测量精度很高,但是容易受到机械阻尼、摩擦力及动力的影响产生误差,且不适合机器人移动过程中的持续力测量。
 (1.1)
(1.1)
1.2.2 国内研究现状
国内的研究相对来说开始得较晚。
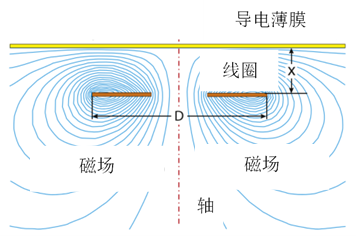
2012年,哈尔滨工程大学的陈东良等人运用相似的仿生原理研制了一款粗糙壁面的爬行机器人[11] 。在该项研究中,将受力情况数学模型化并进行分析,当给定距离小于某个阈值时,处于与表面的接触状态,可以得到一定的垂直恢复力,可以推算出足部在一定速度下墙面的实时响应能力;当给定距离大于该阈值时,处于脱附状态,没有接触力的作用。通过这样做,可测定下落时脚尖接触后瞬间离开的跳跃和起伏情况。同年,南京邮电大学的徐丰羽等人也开发了一款结构类似的仿生爬壁机器人[12]。
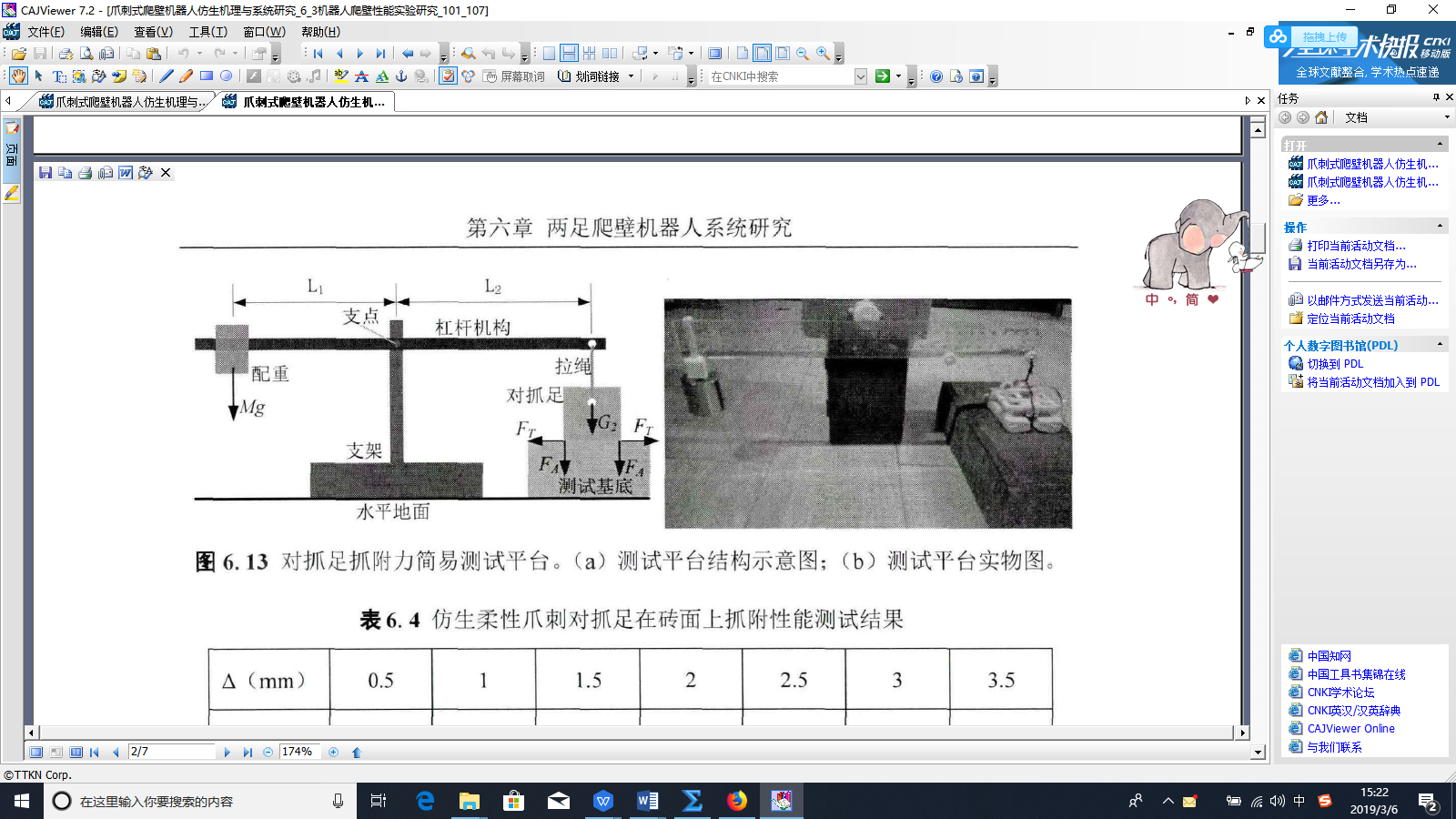
(a) 测试平台结构示意图 (b) 测试平台实物图
图1.1 中国科学院合肥物质科学研究院对抓足的抓附力测试平台[13]
2015年,中国科学院合肥物质科学研究院刘彦伟等人基于仿生机理设计了一款爪刺式两足仿生爬壁机器人[13]。建立了力测试平台,来测试足部的抓附力上限,其结构如图1.1所示。其中,配重为M;对抓足与配重距离支点的距离分别为L1、L2;对抓足重力为G2,法向力和切向力分别为FA、FT。FA与FT 相关,FT与弹簧拉力、足部位移相关,而FA可以通过式(1.2)求得。
 (1.2)
(1.2)
研究内容、预期目标与论文框架
1.3.1 研究内容
模仿生物通过感受皮肤层变形和振动的多样性来测量力,以使得提供牵引力、顺应性和保护措施成为可能。通过研究墙壁表面的反作用力,以及对足部接触压力点建模,设计硬件的配置,并通过实验验证该模型是否适用。传感器采用现成的、可靠的元件,并采用校准机制对传感器进行表征。此外,该系统还应当具有可调的设计参数,以适应不同的设计。该硬件设计通过实验验证能够在仿生机器人行走时有效。最终,建立一个可以测量多轴力的、重量轻的力采集系统,使得机器人能够据此减震并提供前行的牵引力。同时,将传感器的测量效果与实际输入值进行比较,通过硬件测试和仿真证实系统的完整性与有效性。具体研究内容包括:
(1)了解课题的相关背景及意义,了解国内外仿生爬壁机器人及多轴力测量措施的发展现状,分析当前存在的问题。
(2)针对四足仿生爬壁机器人,调研目前的单轴及多轴力测量措施,比较各种方式的优缺点,选定一种合适的传感元件进行力的测量。
(3)对四足仿生爬壁机器人足部接触力进行理论研究,建立模型并进行数学分析,同时找到一种方式,使得测量数据得以应用在仿生爬壁机器人的控制框架中。
(4)以仿生足为基础,对传感器的配置进行硬件设计。
(5)进行实验,验证针对仿生爬壁机器人所提出的力采集系统的方法的合理性,对多轴力测量的传感系统进行标定,对所提出的设计进行结构分析。
(6)最后考虑如何使得该力采集系统的应用更广泛、更灵活、鲁棒性更强,进一步考虑该系统的研究和应用及改进方向。
1.3.2 预期目标
研究的最终目标是使得机器人实现与动物相当的高灵活性。机器人高敏捷性的实现需要不同方面的配合,其中,本课题集中研究仿生机器人足部的力采集系统,以提供实现机器人闭环控制、提高机器人鲁棒性的可能。本次研究的具体目标如下:
(1)调研机器人触觉传感器,探索目前机器人触觉系统存在的挑战。
(2)分析足部与表面接触的模型,并针对墙壁表面的反作用力,建立足部与表面的接触点处的模型。
(3)配合仿生机器人的柔性足,设计一个完整的单足力采集系统,以测量不同方向的墙壁表面的反作用力。
(4)编写程序,通过仿真和硬件实验,评估传感器的性能,调节设计参数,确保结构的完整性。
1.3.3 论文框架
第1章,介绍本文的选题背景及研究的目的与意义,调研国内外仿生爬壁机器人力测量方法的现状,阐述本文的研究内容、预期目标及论文框架。
第2章,调研当前最新的机器人用触觉传感器,分析将触觉传感器应用在仿生爬壁机器人足部力采集系统上存在的挑战。
第3章,建立仿生爬壁机器人足部与壁面的接触模型和足部的结构模型,分析足部的运动轨迹,据此设计足部结构。
第4章,介绍仿生爬壁机器人单足力采集系统的硬件设计的系统结构及各个模块,主要包括电源模块、力传感模块、信号模块、控制模块、显示模块。
第5章,介绍仿生爬壁机器人单足力采集系统的软设计的总体流程框架及各个分功能,主要包括初始化、A/D转换及数据的显示。
第6章,对搭建的力采集系统进行试验验证,对系统的线性度、迟滞性、重复性等性能进行分析,并讨论重力和偏转角度等因素在实际操作过程中对测量效果的影响。
第7章,对本课题进行总结,并阐述未来改进的空间和方向。
机器人用力触觉传感器综述
2.1 触觉传感器分类
表2.1列出了各类传感器的测量信号及优缺点对比情况。
表2.1 各类传感器对比分析
传感器 | 测量信号 | 优点 | 缺点 |
电容式 | 电容 | 测量范围广泛,分辨率高,灵敏度高,线性好,成本低,时间性好 | 体积大,集成难度高,存在寄生电容引起的误差,易受噪声、灰尘、油污干扰,信号处理电路复杂,稳定性差 |
电感式 | 电感 | 量程较宽,灵敏度高,线性度高,重复性好,成本低廉,可靠性高 | 不适宜用于快速动态测量,分辨率随着测量范围的增大而减小,需要稳定的激励电源,存在零位输出电压引起的误差 |
光电式 | 光强 | 分辨率高、灵敏度高、反应速度快,不容易受到电磁干扰 | 标定操作复杂,缺乏灵活性,多力操作时线性差,对环境要求高,时间性差 |
压阻式 | 电阻 | 结构简单,具有较高的过载能力 | 功耗高,重复性差,接触式测量易受干扰且易损伤接触表面,制作工艺复杂 |
压电式 | 电荷 | 动态范围广泛,灵敏度高,信噪比高,并且可靠性高 | 分辨率低,存在信号延迟,信号处理电路复杂,温度漂移较为严重 |
磁敏式 | 磁场强度 | 生产成本低,耐腐蚀,不易受到光照、粉尘、油污、烟雾的影响,可靠性高,体积小 | 分辨率低,结构复杂 |
触觉感知广义上包含对接触表面的受力、挤压、温度、滑动、物体接近情况的感知,狭义上则指对于接触表面力的感知。根据感知原理,目前的触觉传感器可分为电容式、电感式、光电式、压阻式、压电式、磁敏式等等[14]。
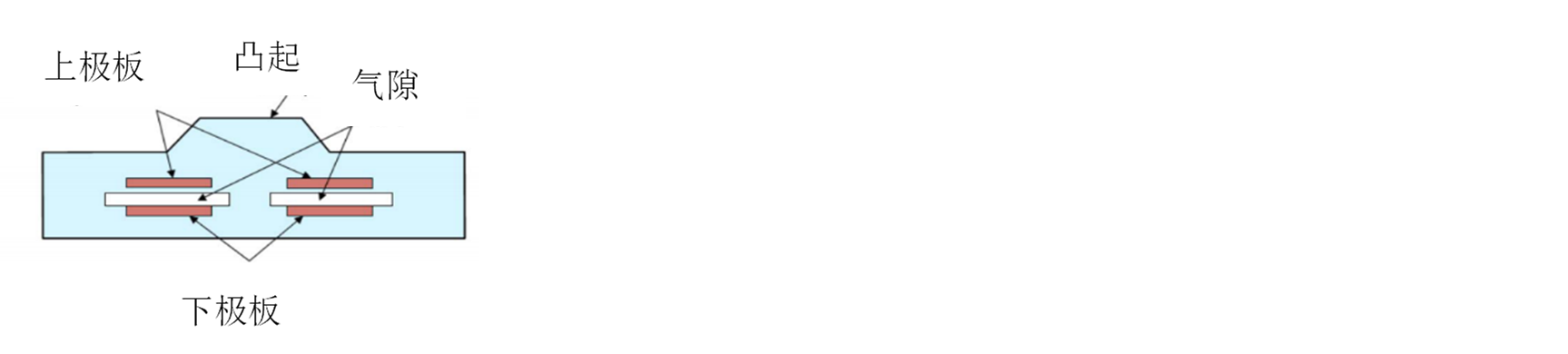
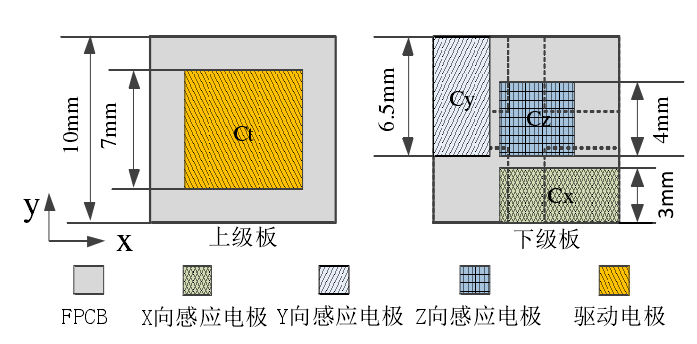
2.1.1 电容式触觉传感器
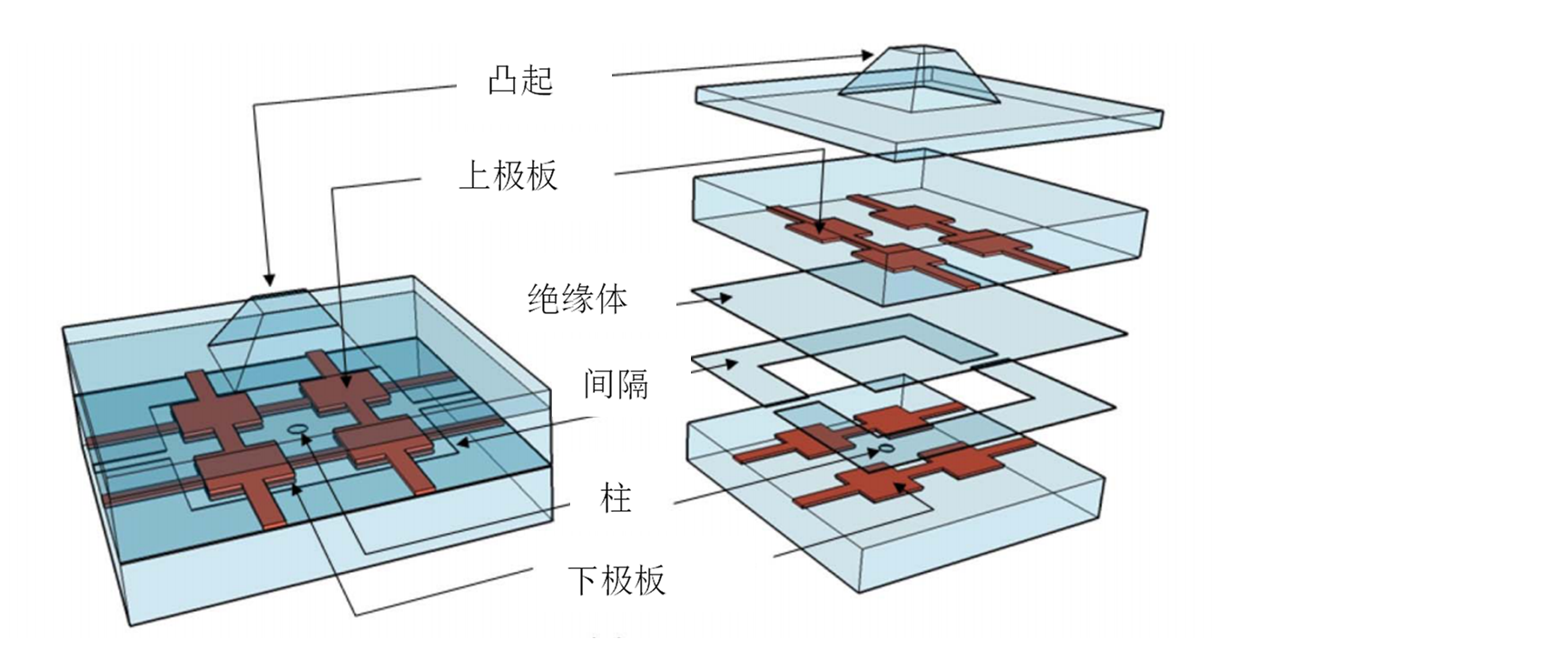
(a) 传感器结构图
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: