基于纯电动汽车的自适应巡航控制系统设计毕业论文
2020-02-19 07:51:46
摘 要
随着汽车使用量的增加和科技水平的提升,如何减轻驾驶员负担、提高行车安全性的同时缓解交通拥堵等系列问题成为了研究热点。自适应巡航控制系统(Adaptive Cruise Control System,ACC)作为一种汽车的智能辅助驾驶系统,对于缓解上述问题有良好的应用效果和发展前景,被越来越广泛地应用在现代汽车工业中。因此,本文对汽车的自适应巡航控制系统设计进行了研究。
在现有的ACC系统控制策略中,只使用传统PID控制器所实现的控制性能已经无法适应复杂的汽车工业的需求。因此,本文采用分层控制的ACC控制算法。依据最优控制理论搭建上层控制器,上层控制器根据传感器检测的车距和相对速度,以及驾驶员设定的巡航速度和车间时距来决策车辆的期望加速度。依据PID控制理论搭建下层控制器,下层控制器根据上层控制器计算得到的期望加速度对节气门和制动器进行控制,使得车辆的实际加速度可以快速、准确地跟踪期望加速度,从而使车辆保持设定的车距或者车速。
最后,本文基于Matlab/Simulink 搭建了能够模拟汽车实际运行工况、反映出系统动态特性同时满足模型简洁性的汽车动力学系统模型。然后对基于最优控制和PID控制设计的ACC控制器,进行了定速巡航、低速启停和高速行驶三种行驶工况下的仿真。仿真结果表明,本文设计的自适应巡航控制系统控制效果良好,可以适应交通环境的变化,满足了自适应巡航系统的设计要求。
关键字:自适应巡航控制系统;纵向动力学模型;最优控制;PID控制;MATLAB
Abstract
With the increase in the use of automobiles and the improvement of technology, how to reduce the burden on drivers and improve the safety of driving while alleviating traffic congestion has become a research hotspot for researchers. Adaptive Cruise Control System (ACC), as an intelligent assisted driving system for automobiles, has a good application effect and development prospects for alleviating the above problems, and is more and more widely used in the modern automobile industry. Therefore, this paper studies the design of adaptive cruise control system for automobiles.
In the existing ACC system control strategy, the control performance achieved by using only conventional PID controllers has been unable to meet the needs of the complex automotive industry. Therefore, this paper uses a hierarchically controlled ACC control algorithm. The upper controller is built according to the optimal control theory. The upper controller determines the expected acceleration of the vehicle according to the relative speed and distance of the sensor and the cruise speed set by the driver and the vehicle time interval. According to the PID control theory, the lower controller is built. The lower controller controls the throttle and the brake according to the desired acceleration calculated by the upper controller, so that the actual acceleration of the vehicle can quickly and accurately track the desired acceleration, so that the vehicle maintains the set speed. Or the distance between the cars.
Finally, based on Matlab/Simulink, this paper builds a vehicle dynamics system model that can simulate the actual operating conditions of the vehicle, reflect the dynamic characteristics of the system and meet the simplicity of the model. Then, based on the optimal control and PID control design, the ACC controller is simulated under three driving conditions: fixed speed cruise, low speed start and stop and high speed driving. The simulation results show that the adaptive cruise control system designed in this paper has good control effect, can adapt to the changes of traffic environment, and meets the design requirements of adaptive cruise system.
Key words: Adaptive cruise control system; optimal control; optimal control; PID control; MATLAB
目 录
第1章 绪论 1
1.1研究背景介绍 1
1.2国内外研究现状及发展趋势 1
1.3本课题设计内容 2
第2章 汽车动力学系统模型 3
2.1汽车纵向动力学模型 3
2.1.1发动机模型 3
2.1.2液力变矩器模型 5
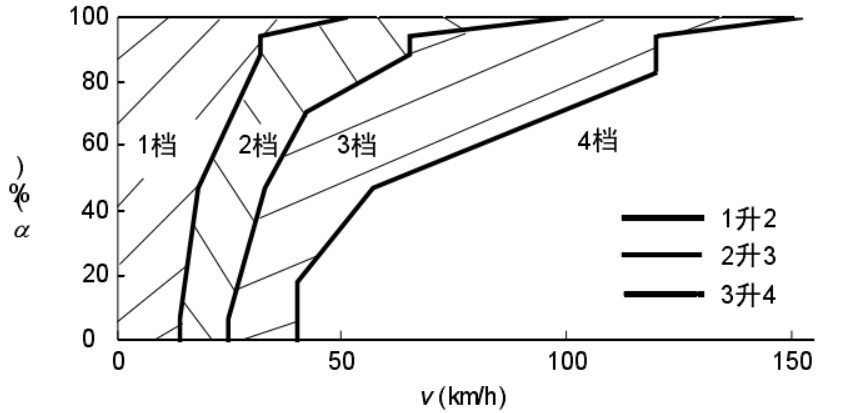
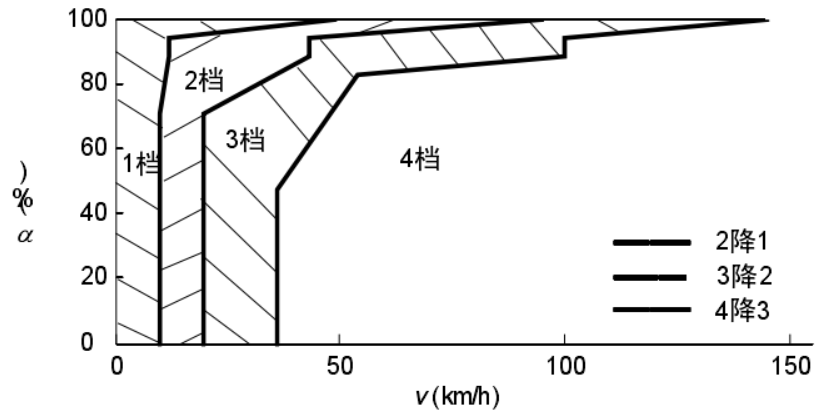
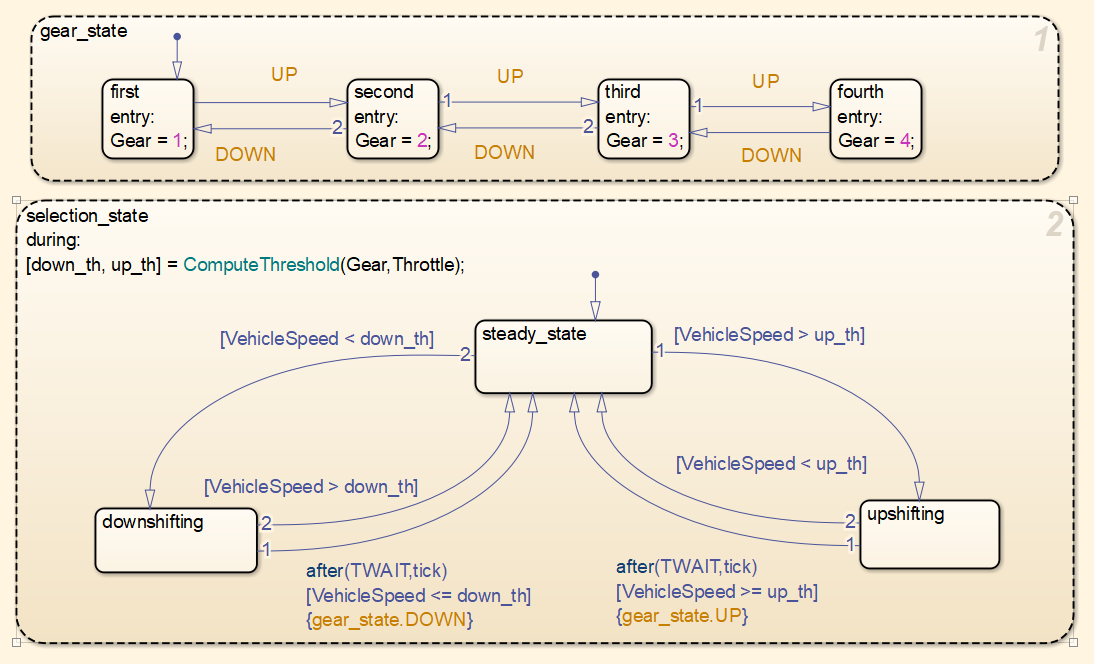
2.1.3自动变速器模型 6
2.1.4汽车驱动系统模型 8
2.1.5汽车纵向动力学模型及其验证 9
2.2执行器模型 11
2.2.1节气门执行器 11
2.2.2制动执行器 11
2.3汽车逆纵向动力学模型 12
2.3.1发动机力矩控制、制动力矩控制切换逻辑 12
2.4.2期望发动机力矩计算及逆发动机模型 13
2.4.3期望制动力矩计算及逆制动系模型 14
2.5本章小结 14
第3章 自适应巡航系统控制算法 15
3.1自适应巡航系统控制策略架构 15
3.2安全车间距离模型 16
3.2.1汽车纵向安全距离建模 16
3.2.2安全距离建模参数范围选取 16
3.3基于PID控制的下层控制器设计 17
3.4基于PID控制的定速巡航上层控制器设计 17
3.5基于LQR控制的距离保持上层控制器设计 18
3.5.1集成式纵向动力学建模 18
3.5.2跟车性能指标设计 19
3.5.3基于LQR理论的车距保持控制 19
3.5.4 LQR上层控制器参数选取 19
3.6本章小结 20
第四章 仿真实验及结果分析 21
4.1自适应巡航系统仿真模型 21
4.2定速巡航控制器仿真结果及分析 21
4.3距离保持控制器仿真结果及分析 22
4.3.1低速启停工况 22
4.3.2高速行驶工况 23
4.4本章小结 24
第五章 总结 25
参考文献 26
致 谢 28
第1章 绪论
1.1研究背景介绍
汽车在现代人类社会工业发展中占有重要地位。为了提高汽车的乘坐舒适性、安全性,降低汽车对于环境的不良影响,汽车自适应巡航系统受到了广泛关注和研究。
近年来,我国的交通行业发展迅速。根据中华人民共和国工信部数据显示,2015年我国总生产汽车2450.33万辆,销售2459.76万辆,产销量接连七年位列世界第一,预计十年后我国的新车产销数约为3800万辆,汽车总的保有量会逼近3.4亿辆[1]。伴随着交通行业的发展,交通事故频发、能耗加剧、环境污染、道路拥堵等问题也显现出来。
根据全国人大的报告,2016年中国发生18万余起道路交通事故,造成5.8万人丧生,同期,发生28万余起生产事故,造成6.6万人死亡[2]。根据中国公安部统计,2017年中国重大交通事故发生的数目以及因为重大交通事故死亡的人数相比较于 2016 年又分别增加了 12.2%和 16.2%[3]。
在能耗方面,2010年国内原油需求量是870万桶/天,2017年就攀升至1100万桶/天,随之而来的是二氧化碳过量排放:近25年的二氧化碳排放量达到过去110年总量的四分之三,致使全球长期均温升高 3.5℃,若不及时采取措施,那么可能面临长期均温增加 6℃的情况[3]。
自适应巡航控制系统作为一种汽车智能辅助驾驶系统,可以在减轻驾驶员负担,提高汽车自身安全性和道路环境安全性的同时,提高汽车的乘坐舒适性,改善交通流量,又能降低对于环境造成的影响,拥有长远的研究价值。
1.2国内外研究现状及发展趋势
汽车自适应巡航控制最早提出于上世纪60年代,但因为当时的科技水平以及对于汽车工业的认知不够成熟,自适应巡航系统没能得以大力发展。自适应巡航系统的发展过程大体上可归结为三个阶段:第一阶段是上世纪90年代初,针对高速公路的ACC系统,主要实现定速巡航和安全车距功能;第二阶段是上世纪90年代末,针对城市工况的ACC系统,即起-停巡航系统,实现自动起步、停车和低速跟车功能;第三阶段是21世纪初至今,综合考虑了燃油经济性、跟踪性能和驾驶员感受的多目标协调式ACC系统[4]。
ACC系统的主要技术包括两个部分,即安全距离计算模型和系统控制算法。
Ioannou在上世纪90年代提出针对微观手动驾驶行为的固定车间时距(Constant Time Headway, CTH)安全距离模型,期望安全距离与自车车速成正比,即安全距离随着车速的升高而越大,这是由于越高的车速需要越大的制动距离[5]。Chiang等人通过实验发现,在车速较低时CTH策略表现过于保守,降低了道路利用率[6]。
基于可变车间时距理论,Broqua等认为车间时距应该与自车车速成正比,强调了自车车速对车间时距的影响[7]。Yanakiev和Kanellakopoulos认为车间时距应该同时考虑自车车速和两车相对车速[8]。Peter Seller等人考虑到驾驶员的反应时间以及制动系统的延迟时间,提出了基于车辆运动学公式推导的安全距离模型[9]。
对于ACC系统控制算法的研究上,目前分层控制是ACC系统控制架构的主流模式。
John Jairo考虑了ACC系统运行过程中良好的安全性和乘坐舒适性,提出一种基于参考模型的控制算法,但通过实验发现该算法受到前车加速度预估准确性的影响较大[10]。Payman Shakouri等人研究了基于非线性模型预测控制的ACC算法,可以根据前车的位置实现跟随模式和定速巡航模式的自动切换[11]。清华大学的刘刚等人以建立驾驶人预估模型理论为出发点,设计了一种基于驾驶人模型的跟车模型,这种算法拥有贴合驾驶人习惯同时易在工程中实现的特点,通过实车试验,验证了该算法在低速工况下的有效性[12]。北京理工大学的裴晓飞等人考虑了复杂交通环境下前车运动状态的不可预知性,提出一种多模式自适应巡航控制策略,即增加模式切换层,使得系统能根据不同工况选择最优的控制方法,同时使用加速度加权平均算法来确保准确的模式切换和连续的输出[13]。
现在,ACC控制策略研究研究日渐完善,其中经典PID控制、最优控制理论以及模糊控制理论等均是主要研究方式。
1.3本课题设计内容
本文基于汽车动力学系统、PID控制和最优控制等相关理论,分别设计自适应巡航控制系统的上下层控制器,并对所搭建的模型进行了仿真验证。 本文主要研究内容如下:
(1)汽车动力学系统建模:综合考虑汽车动力学系统的特点以及ACC控制系统的仿真要求,在Simulink中搭建可以模拟汽车实时运行工况且满足模型简洁性的汽车仿真模型。包括汽车纵向动力学模型、执行器模型以及汽车逆纵向动力学模型。
(2)自适应控制系统控制策略架构:完成汽车自适应控制系统整体方案设计。
(3)安全距离模型设计:分析ACC系统安全距离模型的特点和原理,搭建基于固定车间时距的安全距离模型,确定其中参数变量的范围。
(4)自适应巡航控制系统分层控制器设计:首先设计基于PID控制的下层控制器,然后设计基于PID控制的定速巡航上层控制器,然后设计基于LQR(Linear Quadratic Regulator)控制的距离保持上层控制器。
(5)自适应巡航控制系统仿真实验:结合Simulink搭建的汽车系统模型,对定速巡航控制器、距离保持控制器进行了仿真,验证自适应巡航控制系统的有效性,最后对整体的控制效果进行分析。
第2章 汽车动力学系统模型
ACC系统的各项功能依赖于精确的汽车动力学系统模型。本章以符合ACC系统研究的需要为目标,搭建能够在满足系统动态响应特性的前提下进行适当简化的汽车动力学系统模型。
如图2.1所示的汽车动力学系统模型包含汽车逆纵向动力学模型、执行器模型以及汽车纵向动力学模型。

图2.1 广义汽车动力学系统模型
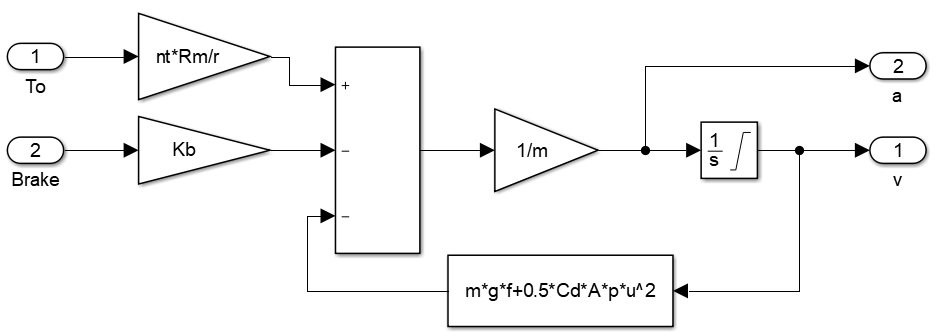
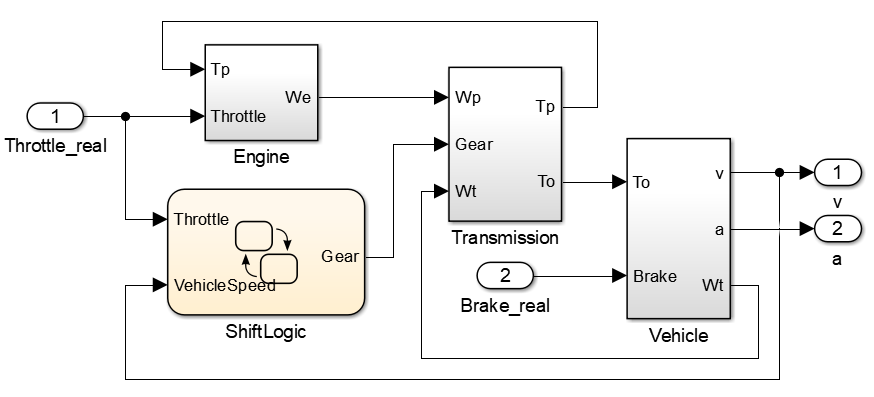
2.1汽车纵向动力学模型
汽车纵向动力学模型包含发动机、液力变矩器、自动变速器以及汽车驱动系统。为了更贴近真实的汽车运行工况。同时满足ACC系统的需要,搭建汽车纵向动力学模型时应该充分考虑车辆的各种工作特性。然而,过高的模型精度会导致模型的过度复杂化,这加大了系统辨识参数的难度以及系统的处理时间。因此,建模时要兼顾考虑模型的精确度和简化程度。
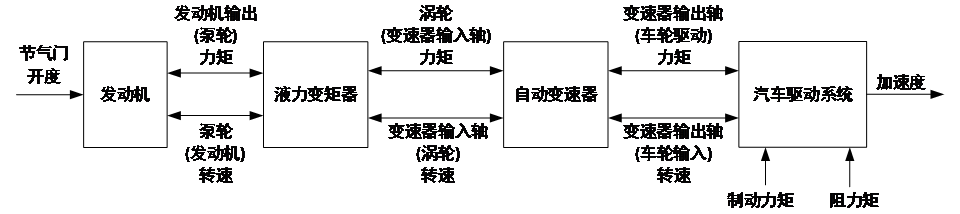
图2.2 汽车纵向动力学模型
2.1.1发动机模型
发动机提供了汽车纵向跟车所需的驱动力。因为在ACC系统中不需要严格控制发动机的内部状态,比如进气歧管的压力、混合气的空燃比等,所以不用建立过于复杂的发动机模型[15]。此处以发动机稳态输出特性为基础,结合发动机动态特性建立模型。
由实验数据可得发动机转速、节气门开度和发动机稳态输出扭矩三者的非线性关系,如式(2.1)和图2.3。
(2.1)
式中,表示发动机的稳态输出扭矩;表示发动机转速;表示节气门开度;表示发动机稳态输出扭矩特性函数。
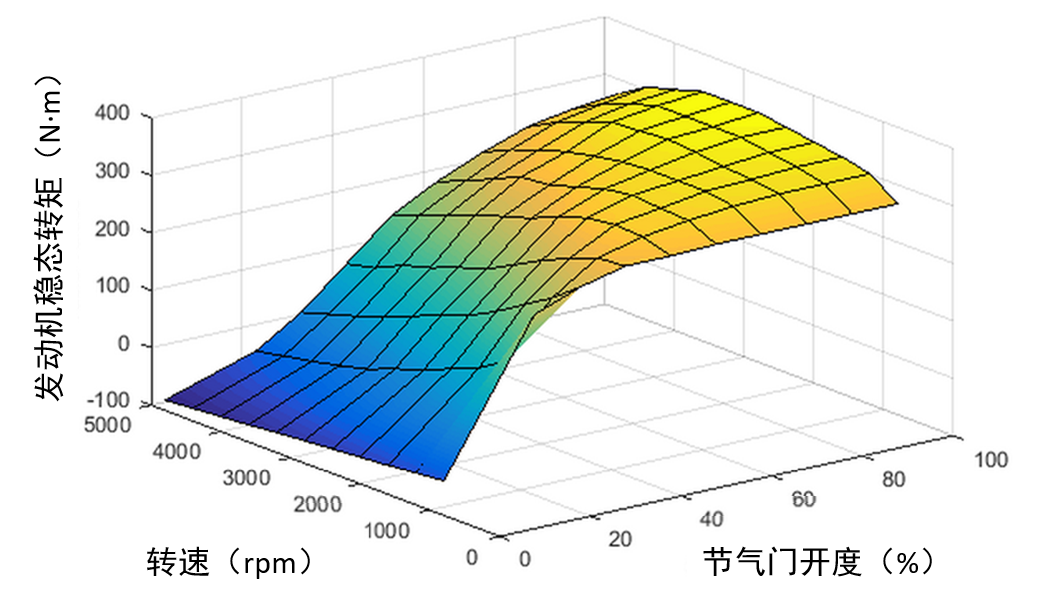
图2.3 发动机稳态输出扭矩特性图
为了贴近发动机实际运转过程中的非稳态特性,此处在其稳态输出的基础上加入一个增益为1的一阶惯性环节,即
(2.2)
式中,表示发动机动态输出扭矩,表示发动机动态输出特性的惰性时间常数,通过实验标定法选择。
发动机输出扭矩与发动机转速的传递关系为:
(2.3)
式中,表示液力变矩器的泵轮扭矩;表示发动机转动部件以及液力变矩器泵轮的有效转动惯量
基于Simulink搭建的发动机仿真模型如图2.4。
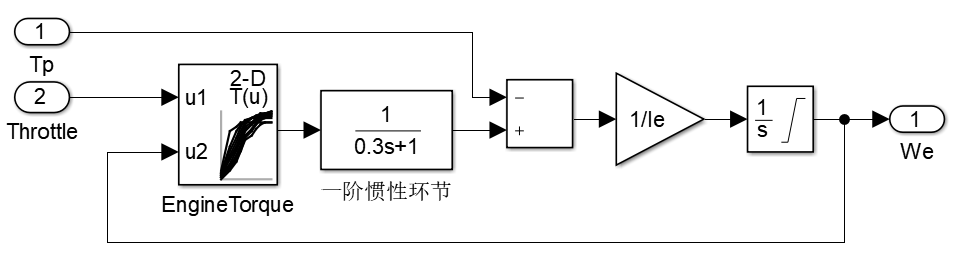
图2.4 发动机模型图
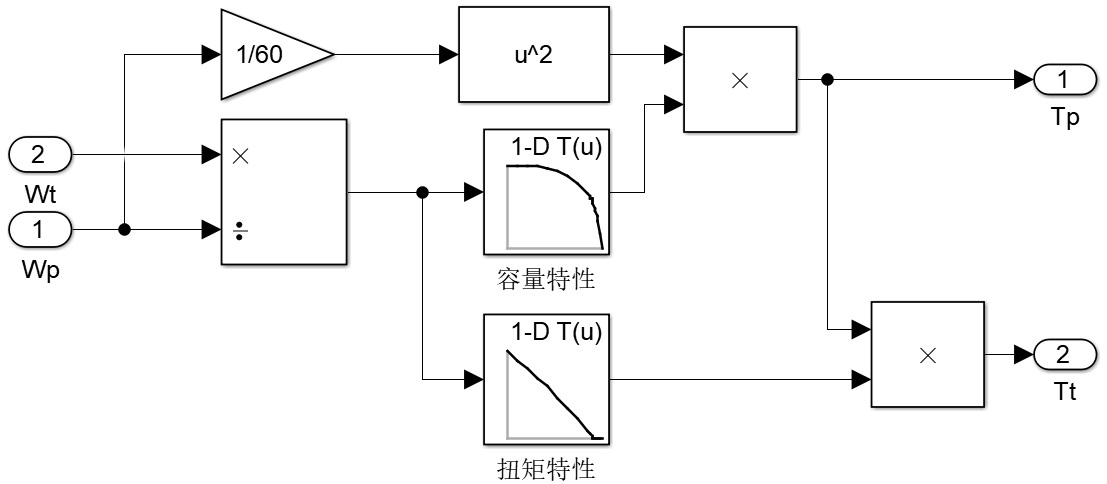
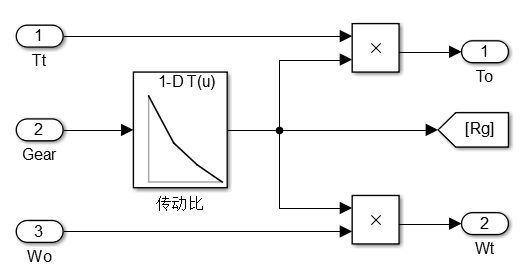
2.1.2液力变矩器模型
液力变矩器是自动变速器的核心组成成分之一。液力变矩器特性包含扭矩特性以及容量特性。若设涡轮转速和泵轮转速的比值为k,扭矩特性表示液力变矩器的扭矩比与k的关系,容量特性表示液力变矩器的容量系数与k的关系。公式表示如式(2.4)、(2.5),由实验数据可得曲线如图2.5。
(2.4)
(2.5)
式中,表示扭矩比系数,表示容量系数,表示涡轮扭矩,表示泵轮扭矩

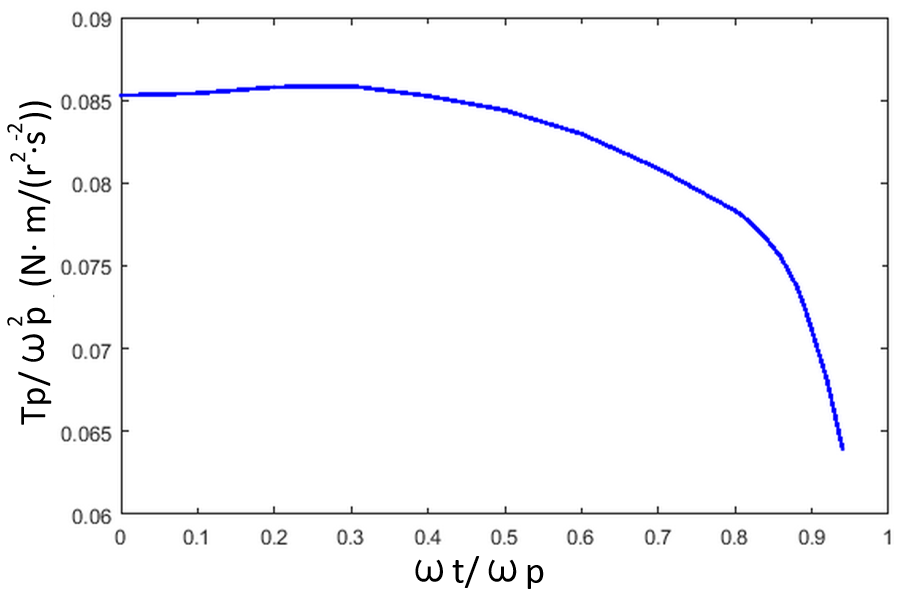
(a)扭矩特性 (b)容量特性
图2.5 液力变矩器扭矩特性和容量特性曲线
由(2.5)式得到泵轮扭矩表达式为:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: