现代海战中的舰船最佳阵位搜索算法研究毕业论文
2020-02-19 07:51:57
摘 要
在海战中,阵位是我方舰艇或舰艇编队在进行战斗时所占领的相对于目标舰艇的位置。用以表示我方舰艇或舰艇编队与目标舰船之间的相互位置关系。对阵位的研究可以提高舰艇的作战和防潜能力,本次研究旨在设计一个用于计算最佳发射阵位参数的解析算法。在研究过程中,首先基于命中概率圆理论找到可选取发射阵位的范围,然后在这个范围的基础上建模,在理想状态下,找到可选取的最佳发射阵位,并建立关于我方到达最佳发射阵位所需时间的解析方程;然后通过双方速度关系对运动态势进行全面分析,求出解析方程在不同情况下解的表达式,由此结合余弦定理就可以求得我方舰船的航向角;最后,将解析算法编译到MATLAB中进行仿真,在模拟输入敌我速度和两者间的距离、敌方舷角、命中概率圆半径和圆心超前量等在海战中我方可收集到的已知量后,可以快速得到我方行程时间和航向角,并得到轨迹图,证明这个算法可用,有效。
关键词:命中概率圆;发射阵位;解析算法;仿真
Abstract
In naval warfare, a position is the position occupied by a ship or fleet in combat, relative to the attacking target. Used to indicate the relationship between a ship or its formation and a target ship. The research of counter position can improve the combat and anti-submarine ability of naval vessels. This research aims to design an analytical algorithm for calculating the optimal launch array position parameters. In the research process, the range of the launch array that can be selected is firstly found based on the hit probability circle theory, and then the model is built on the basis of this range. In an ideal state, the optimal launch array that can be selected is found, and an analytical equation about the time required for us to reach the optimal launch array is established. Then the motion situation is comprehensively analyzed through the relationship between the two sides' velocities, and the expression of the solution of the analytical equation in different situations is obtained. Finally, the analytical algorithm to compile the simulation in MATLAB, the simulation input speed and the distance between friend or foe, enemy Angle, hitting probability circle radius and center lead etc. We are able to collect in naval warfare known quantity, we can quickly get our travel time and course Angle, and get the path diagram, show that the algorithm is available and effective.
Keywords: hit probability circle; Emission array; Analytic algorithm; The simulation
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 背景及意义 1
1.2 国内外研究现状 2
1.2.1 国内外对阵位的研究 2
1.2.2 国内外对路径选择的研究 4
1.3 本次论文的内容及安排 5
1.3.1 论文的研究内容 5
1.3.2 论文的组织结构 5
第2章 研究原理和方法 7
2.1 可攻区域分析 7
2.1.1 静态命中圆 7
2.1.2 运动时的命中圆 7
2.1.3 命中概率圆 8
2.2 确定最佳发射阵位 9
2.3 迭代法 10
2.4 本章小结 11
第3章 鱼雷最佳发射阵位的解析算法 13
3.1 算法分析 13
3.2 解析法 14
3.3 最佳航向角 17
3.4 本章小结 18
第4章 系统仿真与结果分析 19
4.1 仿真数据 19
4.2 仿真结果 20
4.2.1 当目标速度小于我方速度时 20
4.2.2 当目标与我方速度相等时 21
4.2.3 当目标速度大于我方速度时 22
4.3 解析法与迭代法的比较 23
4.4 本章小结 24
总结与展望 25
参考文献 26
附 录 28
致 谢 30
第1章 绪论
1.1 背景及意义
在《军事大辞海·上》一书中指出,阵位是舰艇寻求有利于开展战役而到达的相对于目标舰艇的某一位置。通俗的讲,阵位是舰艇或舰艇编队在海上战斗中所到达的相对于目标舰船的位置。用以体现舰艇或舰艇编队与敌方舰船彼此之间的关系。通常以目标舰船舷角(或方位)、敌对双方之间的间距和我方舰船航向角等要素表示。有海上战斗展开阵位、准备发射(攻击出发)阵位、发射(攻击)阵位等。阵位的选择主要按照不同战斗阶段对阵位要素的需求、交战双方兵力水平、武器及其战术观察设备的性能和海区环境条件等决定。舰艇或舰艇编队在海战中能否侦察并战术机动占领有利发射阵位,是克敌制胜的重要条件之一。对阵位的研究,有利于提高舰艇在海上的作战和防御能力。现如今,水面舰艇作战与防潜一直是世界性难题,世界各国海军都在为此发展武器装备的同时,也要改善防御能力,提高作战能力。对阵位的研究是提高作战和防潜能力的重要方法,其中对发射阵位的研究是重要组成部分。
舰船在进行海上鱼雷攻击战时,如果侦察到的目标位于我方极限射距圆和鱼雷危险区以外时,我方舰船必须率先机动到某一位置,使目标最终会机动到这一位置的极限射距圆内,而后发射鱼雷,才能保证一定的概率击中目标舰船,这一位置就是发射阵位。这个发射阵位与预计打击点的连线即为我方对目标的有效射距,我方只有在目标舰船驶入极限射距圆区域后才能开始攻击[4]。所以舰船在使用鱼雷打击敌方船只的过程大致为:搜索目标舰船;发现目标舰船后监测并搜集目标的运动速度和舷角等参量;进行可攻性判断并找到和占领有利的发射阵位,到达发射阵位后将鱼雷按预定的方向射出打击目标[1]。其中舰船是否可以成功占领鱼雷发射阵位是使用鱼雷对目标进行有效打击的前提。同时,舰船在运用鱼雷攻击敌方舰船时,会受到鱼雷射程、鱼雷速度、鱼雷航行误差、采集目标信息误差等要素的影响[3],为使鱼雷达到预期的攻击效果,舰船必须能够快速地占领一定的发射阵位,然后才能发射鱼雷,这个我方舰船能够最快安全到达的发射阵位称作进攻最佳发射阵位。
当然,舰船的攻击过程不仅仅在于鱼雷发射阵位的选定,在选定了有利的发射阵位后,还应具备良好的占领发射阵位机动(简称占位机动)能力。发射阵位的好坏直接关系到我方鱼雷的打击效果,而占领发射阵位的机动能力则决定着是否最终可以占领到最佳的发射阵位。占领发射阵位机动能力取决于路径的选择、舰船的操控性能和机动性能,以及舰船指挥员能否采取合理精确的机动策略[5]。后两者由舰船硬件设备和船员的战斗意识决定,路径的选择则涉及到路径优化问题。本次课题主要围绕最佳发射阵位的选定进行研究,所以路径优化问题仅在国内外研究现状一节进行介绍。
1.2 国内外研究现状
在引言中可知,对阵位的研究可大致分为阵位的搜索与选定和占位过程中的路径规划两个方面。对阵位搜索与选定的研究过程为:首先分析敌方的运动状态,并结合我方鱼雷的极限射程确定命中概率圆,找到发射阵位的分布范围;然后在忽略路径上障碍的前提下,通过对占位可行性的分析和预计行程时间的计算,选定最佳的发射阵位。占位过程中的路径规划就是研究如何到达选定的发射阵位,通过对路线中障碍、突发状况和占位安全性的分析,确定可以到达最佳发射阵位的最优路径。
1.2.1 国内外对阵位的研究
关于舰船阵位搜索研究,现在的研究主流是阵位选取和占位问题。因为这个涉及到军事问题,无法收集到国外有关阵位研究的文献,因此本节只分析了国内有关阵位研究的成果。
在研究阵位问题时,要分析的首要问题是我方是否可以攻击、或找出可攻击的区域范围。在研究我方是否可以攻击这个问题上,李冬梅等人在2004年发表的论文中提出解决我方是否可以进攻的思路:在采集到目标舷角、目标速度和我方与目标的距离等信息后,取我方速度和目标速度的比值,当我方速度大于目标速度时,我方在追踪后可以发动进攻;当我方速度小于目标速度时,要考虑目标的舷角,若目标舷角大于一定值,则无法进攻。这个办法给出了完美的可攻性判断准则,还可以得到最佳攻击方向[1]。在研究我方可攻击区域这个问题上,赵锐等人在2015年发表的论文中给出了他们在可攻区域分析和对策研究的成果:当我方潜艇的进攻速度小于目标潜艇航速时,我方潜艇对其所发现的目标能否占领发射阵位攻击,取决于潜艇发现目标时其所在位置与目标航向间舷角的大小。另外,潜射武器射距越长,火力覆盖的范围越大,则潜艇可攻区的范围就越大;潜艇接敌速度越快,可攻区的开角越大,其可进攻的区域也就越大,从而得出潜艇编队作战中兵力配置的规划[4]。
在确定可攻后,还要研究我方占领有利发射阵位的能力和占位的生存概率。在占领有利发射阵位能力这方面,宋保维等人在2007年发表的论文中指出:我方占领阵位的能力是由我方的航速和鱼雷射程决定的,两者中的任意一个因素过小,都会限制我方的占位能力。因为传统的潜艇占领有利阵位概率模型只考虑了目标是否进入我方鱼雷的当前打击范围,而不是进入我方发射阵位的打击范围。所以,传统潜艇占领有利阵位概率模型只是我方能否采取占位机动的表征,而不能认做我方可不可以成功占领发射阵位能力的度量。占位能力的度量可主要分为占位可行性、鱼雷命中概率和目标发现我方概率。在详尽考虑潜艇占领有利阵位过程中的主要影响因素的基础上,文章中基于Markov过程理论,构建了新的潜射鱼雷占领有利阵位能力的概率模型, 该模型可综合分析我方在占位过程中目标威胁 、占位时间和有利阵位选择等主要因素对潜艇占位能力的影响,然后进行案例分析, 成功的验证了新模型的有效性[8]。随后,在2013年,张会等人基于微分对策研究了潜艇用鱼雷攻击时占领有利阵位的问题,他们针对潜艇用鱼雷攻击时占领有利阵位的问题,建立了占位方案分析和优化的微分对策模型,并采用影子目标法对这个问题进行简化。通过这个问题的分析,证明了在给定躲避速度大小的情况下,潜艇最好躲避策略为进行直线运动。由此可以通过定性微分对策理论,得到潜艇能够占领攻击阵位的条件。然后以占领有利阵位所需时间最短为优化目标,建立可占位情况下的占位方案优化模型,由这个方案可以得到计算最短占位时间的解析公式[7]。
在研究我方占位生存概率这方面,郑亚波等人在2010年发表的论文成果显示,在有合理的战术指导的条件下,他们着重研究了反潜作战中水面舰艇占领发射阵位过程中会与目标潜艇产生对抗的问题,同时还阐述了潜射线导鱼雷的打击方法以及水面舰艇采用综合对抗模式对抗敌方鱼雷的方法,并采用模拟统计和误差分析的方法得到了特殊对抗条件下水面舰艇的生存概率,为提高水面舰艇占领发射阵位时的生存概率提供了理论依据。仿真结果显示,综合对抗模式下对抗来袭鱼雷时具有较高的成功率, 由此这个模式是一种非常有效的对抗方式[3]。
当然,在海战中不仅仅只两艘船间的对抗,更多的是舰艇编队之间的对抗。夏佩伦等人在2016年发表的论文中研究了我方潜艇在攻击多个目标条件下发射阵位的选择和占领发射阵位机动的有关问题,并指出了多目标战场态势及攻击形式对占领发射阵位机动会产生的影响。他们在研究过程中,将多目标战场态势分为编队多目标和普通多目标两种情况,在两种情况下,又将多目标攻击又分为同时攻击和连续攻击两种模式进行研究,从而总结出发射阵位选择的基本原则以及潜艇占领发射阵位的机动策略[12]。
1.2.2 国内外对路径选择的研究
路径的选择涉及到路径优化问题,最早的关于路径规划算法的研究是开始于上世纪七十年代,并且其研究目的最开始是将算法应用在移动机器人上的,但是到目前为止,专家们仍未实现将路径规划算法完全应用在社会生活中。因为移动机器人与舰船的控制在自由度和安全操作上是非常相似性的,所以有学者将这种路径规划的算法研究延伸到舰船的控制上,但是舰船的运动环境更加恶劣和开放。根据舰船的自身特性,一些研究人员在研究舰船路径规划系统的过程中,尝试性的将船舶避碰算法和机器人路径规划算法的结合,最后也成功的研究出了舰船的路径规划算法。一般而言,舰船在海上路径规划的方法可以分为三种:第一种是来源于静态地理信息的全局路径规划,静态的地理信息由已知的全局海图提供;第二种是来源于动态环境信息的局部路径规划,动态信息包括天气、风速及海面悬浮物等;第三种是将前两种方法结合后得到的混合路径规划,可以综合分析静态和动态的信息,更具有适用性。
在全局路径规划中,全局海图往往是根据己被探知的地理信息绘制出来的,且我方舰船在海图中的位置是己知的。在全局路径规划中,我方舰船可以按照给定的指令要求寻找一条最佳的路线到达指定的目标位置,其中这些指令要求可以是最短的时间、最少的耗能、最小的距离等等。然而,因为在现实环境中存在很多不确定性因素,所以全局路径规划往往缺少实际的应用价值。而且由于己知海图只能代表一个静态环境,当全局路径规划方法应用到未知动态环境当中时,舰船通常很难做出快速精确的决定,因此全局路径规划通常不适合舰船在实际环境下进行导航。在离线状态下得到全局路径后还需要进行后续的在线规划,因此需要设计具有在线功能的局部路径规划,使其能够帮助舰船在随机动态环境中进行路径规划。尽管局部路径规划在随机动态环境中更具有较强的灵活性,但是它也有很多局限性,单独的局部路径规划得到的路线不具有目标可达性,而且它其规划出的目标路径具有不确定性,因此采用第三种混合路径规划已经成为了现代导航、制导与控制的基本方式[6]。
基于这个原理,孙晓界在进行有关无人水面艇的研究时,在结合了无人艇的运动特性后选择采用混合路径规划,其中,在全局路径规划中釆用的是进化遗传算法,在局部路径规划中釆用的是速度分解法[6]。这样,不仅能给无人艇提供一条完整的路径,还可以避开环境中新出现的障碍物。
在关于优化这方面,我在指导老师提供的外文文献中了解了有关策略优化的算法,大部分策略优化算法可归为策略迭代法、策略梯度法和无导数优化法三大类。在文献中提出了一种可以保证控制策略的单调性改进的控制策略优化方法。这个算法对神经网络等大型非线性策略的优化是有效的。作者通过实验证明了这种算法在多种任务上的强大性能,比如:学习模拟的机器人游泳、跳跃和步行步态;以及使用屏幕图像作为输入来玩Atari游戏。尽管这个算法得到的近似值与理论值有偏差,但它可以给出单调的改进,几乎没有超参数的调整[9]。
1.3 本次论文的内容及安排
1.3.1 论文的研究内容
由上述可知,现代海战中的舰船最佳阵位搜索算法研究这个课题具有很高的实用性,有很多方向值得进行深入研究。例如:如何确定最佳发射阵位、可攻击区域分析、占领最佳发射阵位能力模型研究、占位生存概率研究、多目标条件下的占位机动研究等。
在本次课题的研究中,主要学习目标是在掌握阵位搜索算法的原理,具备利用先进优化理论解决阵位搜索问题初步能力前提下,着重研究确定最佳发射阵位的解析算法。任务的步骤是以两艘水面舰船为研究对象,将它们放在视为敌对面,以目标舰船与我方舰船的运动状态,建立阵位模型,推导确定最佳发射阵位的数学解析算法,并在MATLAB上进行仿真,得到模拟阵位图。
1.3.2 论文的组织结构
本论文的结构安排如下:
第一章:绪论,首先进行了论文引言的撰写,即阵位的作用和研究阵位搜索的背景和意义,并对阵位这一概念进行了简单的介绍。然后介绍了目前国内外关于占领发射阵位、占位能力和路径规划的研究现状,最后简述了本次论文的研究内容。
第二章:研究原理和方法,本章首先介绍了我方鱼雷击中目标舰船的条件,并简述了命中概率圆的概念;然后讲述了在不考虑海面上的障碍时,如何通过命中概率圆简便的找到最佳发射阵位;最后介绍了一种计算最佳发射阵位的数学方法,可以求出我方到达发射阵位的时间以及航向角的数学表达式。
第三章:解析算法,本章讲述了确定最佳发射阵位的解析算法。首先是是算法分析,通过敌我的速度关系确定进攻区域,然后建立最佳阵位模型,结合余弦定理列出解析方程,并按照不同的速度关系讨论,得到不同速度关系下我方到达发射阵位的时间,最后由时间求得我方的航向角。
第四章:MATLAB仿真结果,本章对第三章求得的解析算法进行仿真。首先撰写了相关仿真数据的设定,然后将解析算法的结果编译到MATLAB中,使其在输入敌我速度和两者间的距离,敌方舷角,命中概率圆半径和圆心超前量等已知量后,可以快速得到行程时间和我方航向角,并得到轨迹图。
第2章 研究原理和方法
本章首先介绍了我方鱼雷击中目标舰船的条件,并简述了命中概率圆的概念,然后讲述了在不考虑海面上的障碍时,如何通过命中概率圆简便的找到最佳发射阵位,最后介绍了一种计算最佳发射阵位的数学方法,可以求出我方到达发射阵位的时间以及航向角的数学表达式。
2.1 可攻区域分析
2.1.1 静态命中圆
 设我方舰船鱼雷的最远射程R已知,结合图2.1可知,当目标舰船处于M处时被我方雷达发现,并收集到目标以速度向某一方向匀速运动,如果某一刻目标舰船移动到A点后停下,那么我方舰船只要驶入以A为圆心,R为半径的圆,在圆中任意位置,发射的鱼雷都可以命中位于A点的目标舰船。我们称这个以A为圆心的圆为极限静态命中圆。
设我方舰船鱼雷的最远射程R已知,结合图2.1可知,当目标舰船处于M处时被我方雷达发现,并收集到目标以速度向某一方向匀速运动,如果某一刻目标舰船移动到A点后停下,那么我方舰船只要驶入以A为圆心,R为半径的圆,在圆中任意位置,发射的鱼雷都可以命中位于A点的目标舰船。我们称这个以A为圆心的圆为极限静态命中圆。
图2.1 当目标运动到某一点后停下时的命中圆
2.1.2 运动时的命中圆
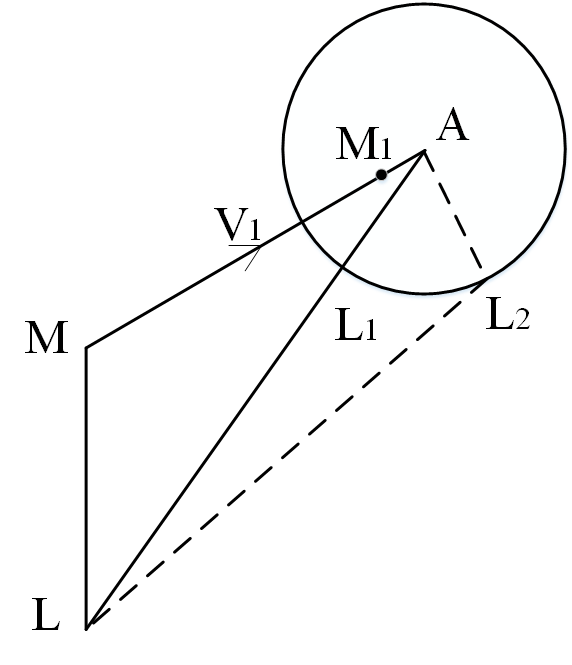
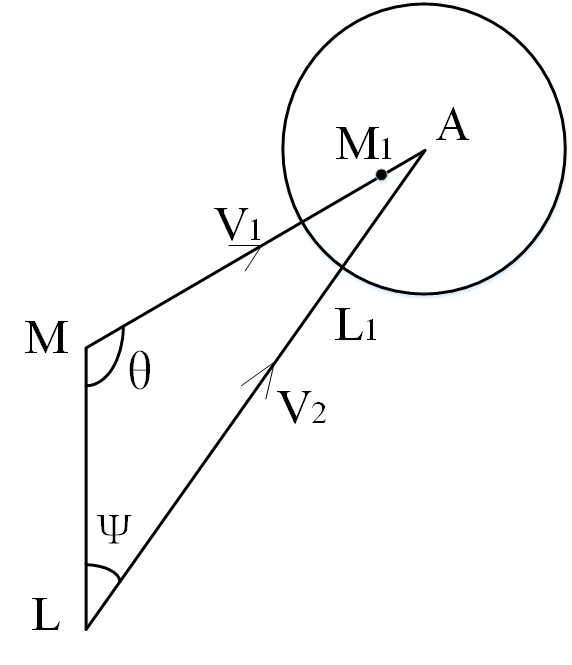
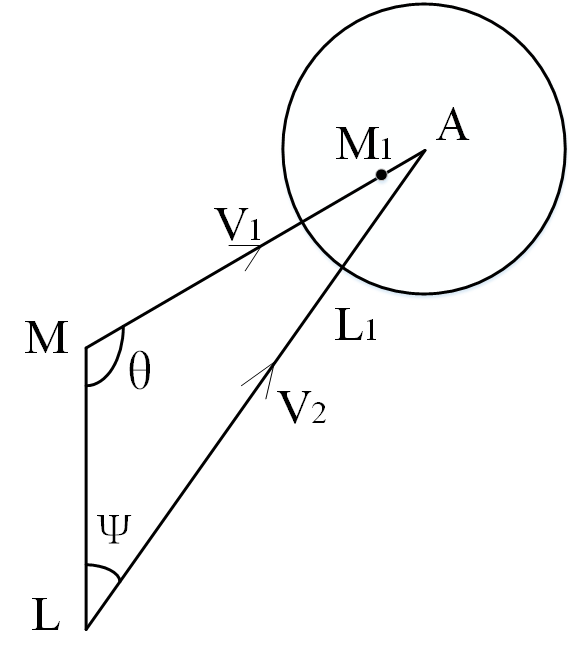
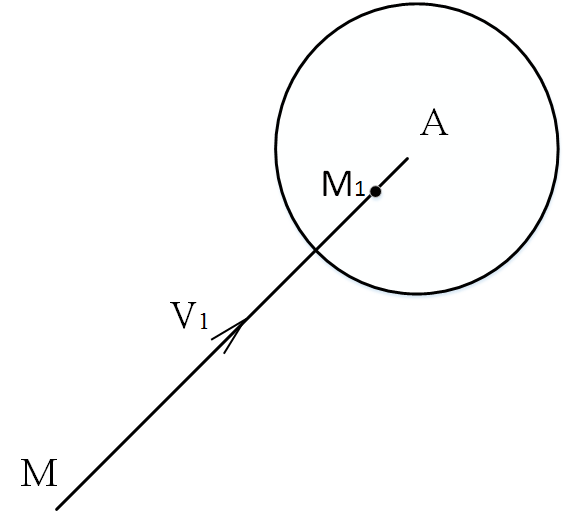 但是在实际作战中,目标舰船往往都是在运动状态,在我方发射鱼雷时,其会保持当前运动状态,继续向前运动,在鱼雷飞向目标的这段时间内,目标舰船也会向前移动一定距离,我们不妨将目标舰船在我方鱼雷飞向目标这段时间移动的距离称作惯性位移,所以我方发射鱼雷时要将预计打击点A沿着目标运动方向前移一个惯性位移的距离。如图2.2所示,当我方选择在目标舰船到达M1处时发射鱼雷,我们要把预计打击点A相对M1前移一个惯性位移的距离。当目标舰船从M处移动到M1处时,我方舰船只要从当前位置运动到以A为圆心,R为半径的圆内,我方鱼雷就可以概率命中目标舰船。我们称这个以B为圆心的圆为极限概率命中圆。
但是在实际作战中,目标舰船往往都是在运动状态,在我方发射鱼雷时,其会保持当前运动状态,继续向前运动,在鱼雷飞向目标的这段时间内,目标舰船也会向前移动一定距离,我们不妨将目标舰船在我方鱼雷飞向目标这段时间移动的距离称作惯性位移,所以我方发射鱼雷时要将预计打击点A沿着目标运动方向前移一个惯性位移的距离。如图2.2所示,当我方选择在目标舰船到达M1处时发射鱼雷,我们要把预计打击点A相对M1前移一个惯性位移的距离。当目标舰船从M处移动到M1处时,我方舰船只要从当前位置运动到以A为圆心,R为半径的圆内,我方鱼雷就可以概率命中目标舰船。我们称这个以B为圆心的圆为极限概率命中圆。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: