多AGV通信控制网络及其单元设计毕业论文
2020-02-19 07:53:02
摘 要
由于经济社会的高速发展,工业现场原先依靠人工搬运物质的方式已经无法适应当代工业发展的要求。伴随着物流运输行业的压力日益增长,AGV小车应运而生,由于其灵活高效、安全可靠等优点,AGV小车越来越受到各大企业的关注。本文主要是对多AGV通信控制网络进行了设计,并对相关各通信模块单元进行了具体要求的设计。
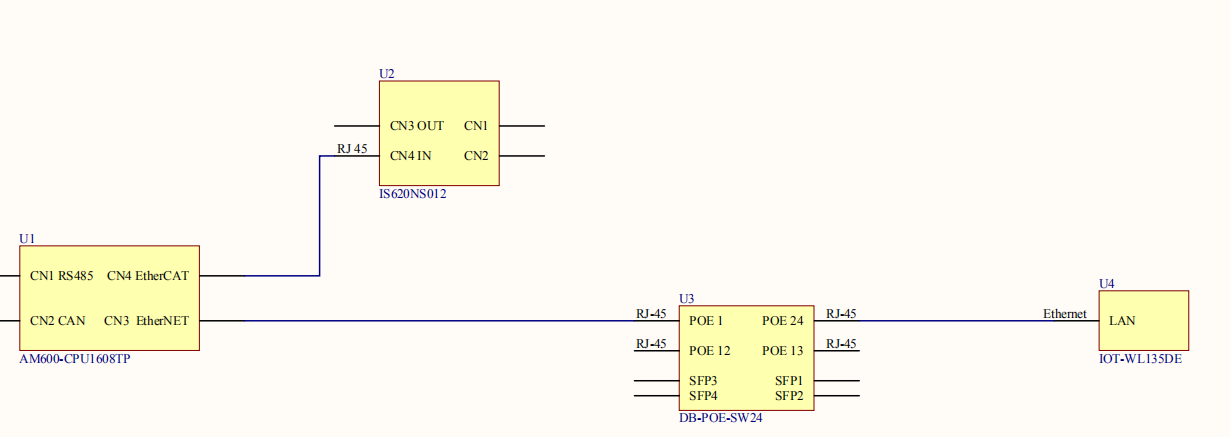
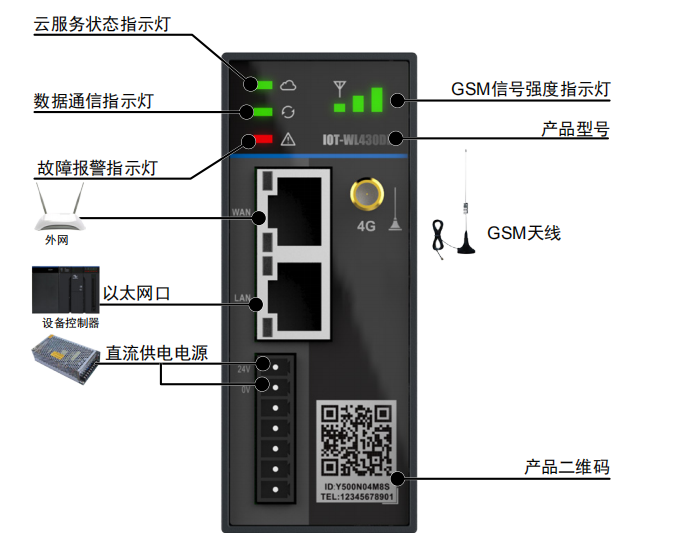
本文研究的是多AGV的通信控制网络,首先根据选题的现实具体背景,选择了一种比较适合背景要求的磁带导航的方法。其次为了满足AGV控制网络的通信要求,选择自建无线局域网络系统。本文中选用方案为中控室交换机有线铺设电缆,然后在有线电缆路径上设置若干无线AP,以保证无线网络信号的通畅。然后,完成了AGV小车通信控制网络模块单元的硬件和软件设计。其中硬件设计包括两个主要模块单元的硬件电路的构建,车载网络通信单元和数据采集单元。关于车载网通络通信单元模块,每台AGV配备一个汇川AM600 PLC作为小车控制系统的核心,并且每台AGV小车的PLC都连接一个汇川物联网模块IOT-WL135DE,借此实现无线局域网通信。对于数据采集模块,本文是利用STM32单片机实现的数据采集,通过CANopen与PLC实现通信功能,传输数据。最后使用汇川AM600 可编程逻辑控制器的编程软件InoProShop,重点是完成STM32通过CANopen与PLC的通信程序和PLC通过无线局域网与中控机的通信程序。
关键词:通信控制网络,AGV,汇川PLC,通信程序
Abstract
Due to the rapid development of the economy and society, the way the industrial site originally relied on manual handling of materials has been unable to meet the requirements of contemporary industrial development. Along with the increasing pressure of the logistics and transportation industry, the AGV car came into being. Due to its flexibility, efficiency, safety and reliability, the AGV car is getting more and more attention from major companies. This paper mainly designs the multi-AGV communication control network, and designs the specific requirements of the relevant communication module units.
This paper studies the communication control network of multi-AGV. Firstly, according to the realistic background of the topic, a method of tape navigation suitable for background requirements is selected. Secondly, in order to meet the communication requirements of the AGV control network, a self-built wireless local area network system is selected. In this paper, the solution is to cable the cable in the central control room switch, and then set up several wireless APs on the cable path to ensure the smoothness of the wireless network signal. Then, the hardware and software design of the AGV trolley communication control network module unit is completed. The hardware design includes the construction of hardware circuits of two main module units, an in-vehicle network communication unit and a data acquisition unit. Regarding the vehicle network communication unit module, each AGV is equipped with a Huichuan AM600 PLC as the core of the car control system, and each AGV car's PLC is connected to a Huichuan IoT module IOT-WL135DE to realize wireless LAN communication. For the data acquisition module, this paper is the data acquisition realized by STM32 single-chip microcomputer, realizes the communication function through CANopen and PLC, and transmits data. Finally, using InoProShop, the programming software of the Huichuan AM600 programmable logic controller, the focus is on the communication program between STM32 and CAN via CANopen and PLC and the communication program between the PLC and the central control unit.
Key words: Communication control network, AGV, Huichuan PLC,communication program
目录
摘要 I
Abstract II
目录 III
第1章 绪论 1
1.1选题背景及目的意义 1
1.2国内外AGV研究发展的现状分析 1
1.2.1 AGV研究的发展历程 1
1.2.2国外AGV研究现状 2
1.2.3国内AGV研究现状 3
第2章 AGV系统通信网络的总体设计 4
2.1 AGV系统设计的相关背景 4
2.2 AGV系统通信网络 4
2.3 AGV系统局域网设计 5
2.3.1有线通信技术 5
2.3.2无线通信技术 6
2.3.3 无线局域网络的构建 7
2.3.4 设备选型 8
2.4 本章小结 10
第3章 多AGV通信控制网络硬件单元设计 12
3.1 通信控制网络数据采集单元 12
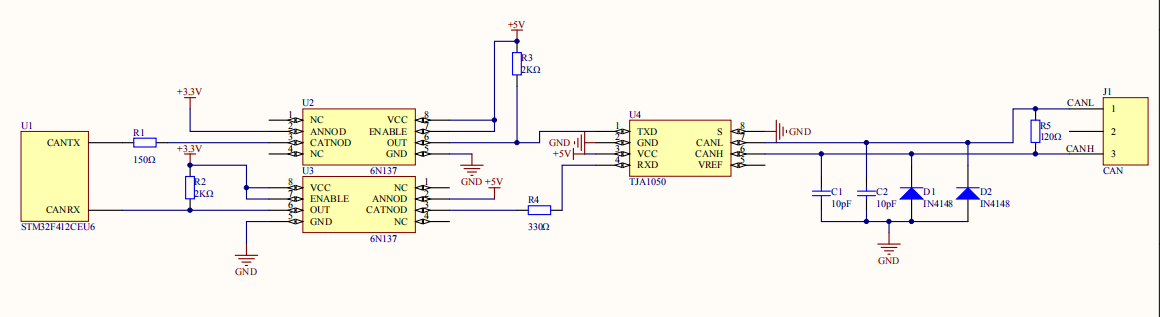
3.1.1 STM32 CAN通信硬件电路 12
3.1.2 CAN2.0与CANopen协议转换电路 13
3.1.3 数据采集模块设备选型介绍 14
3.2 通信控制网络车载网络通信单元 15
3.2.1 车载网络通信单元的设计 15
3.2.2 设备选型介绍 16
3.3 本章小结 17
第4章 多AGV通信控制网络软件单元设计 18
4.1 STM32通过CANopen与PLC的通信 18
4.2 PLC通过CANopen与单片机通信 19
4.2.1 AM600 PLC的CANopen通信简介 19
4.2.2 PLC CANopen通信软件编程 19
4.3 PLC通过无线局域网与中控机的通信 20
4.4 本章小结 20
第5章 总结与展望 22
5.1 总结 22
5.2 展望 22
致谢 24
附录A 25
附录B 26
附录C 27
附录D 28
附录E 30
第1章 绪论
1.1选题背景及目的意义
随着社会现代化程度越来越高,世界范围内许多大规模的生产制造型企业仓库的货物库存量也越来越大。我们都知道,仓库内货物的运输分拣效率对一个企业整体的经济效益来说至关重要,因为这样可以大大减少需要消耗的人工成本,从而促进企业的整体生产效率。由此可见,AGV小车的诞生及盛行绝不是偶然,是依据时代要求所发展出的有显著特征的产物。
AGV即为自动导引运输车,英文全称为Automated Guided Vehicle,一般来说是指那些能够按照设定的导引路径自动行驶的无人运输小车。总的来说,AGV车需要具备几个条件。首先车身必须预装有自动导引功能的装置,可以是光学类导引或者是电磁类导引。然后还需具备移动装载功能,毕竟AGV的诞生就是为了提高运输货物的效率。而且AGV作为一种便捷的运输工具,自然要考虑到它的安全性能,AGV车自身要配备有完整的避障系统和应急处理系统。最后,AGV车还应该具备路径规划能力,为小车寻找最适当的路线到达目的地。
如今经济全球化程度急剧加深,AGV在物流运输行业扮演的角色将越来越重要。AGV在实际的工业生产应用中,一般都是多台AGV车组成的一个多AGV系统,或者可以称作AGVS。而在一个多AGV控制系统当中,多AGV的通信控制网络是至关重要的。因为只有多AGV通信控制网络搭建成功后,各台AGV小车才能顺利地与上位机通信,接收上位机调度系统的指令,或者是向上位机发送采集的数据信息。多AGV系统中各个部分之间通信连接成功,才能真正实现无人驾驶,一般只需要通过电脑或者是手持操作面板控制AGV的动作。这一技术实现后,和传统物流运输方式相比,运输所需的费用和复杂程度显著性地降低。
1.2国内外AGV研究发展的现状分析
1.2.1 AGV研究的发展历程
AGV的历史往前可以追溯到上个世纪,它的发展历程距今已经有六十几个年头了。1953年,世界上第一台AGV小车诞生,这是一种简易式的AGV,结构形式十分简单,毕竟当时的技术水平还是十分有限的。但是功能设计还算完善,能够担任物料运输的角色,具备有AGV小车的基本功能。第一辆AGV小车的原型其实是一辆牵引式的拖拉机,当时是由其改造而成的,主要是负责搬运物料。这辆AGV小车会沿着空中布置好的轨道导线在一间杂货仓库里运输指定的货物。
二十世纪七十年代,AGV小车的基本导引技术已经发展为依靠电磁感应的原理来进行导引。这种导引技术主要是通过感应埋在地下的金属导线产生的频率,从而来导引小车按照指定的路径行驶,不会行驶到错误的路径上。当时就已经有多种牵引式的AGV应用于各大工厂和仓库,工程技术人员可以通过一种特殊的设备去控制埋在地下的导线,使其可以隐藏或显现出本身的固有频率,进而指引AGV沿着预定的轨道行驶。
二十世纪八十年代,研究学者们将无线导引技术引入到AGV小车的导引技术中。继而依靠激光和惯性的无线导引方式应用于许多企业和工厂,这样可以相对提高AGV小车的灵活性,不必要去铺设那些复杂的导线,节省了人力物力。这种导引方式比起前面的导引方式,也显得更加准确。当需要改变行驶路径时更加简便,不需要中断生产去改变地面固定导线,因此也相对提高了生产效率,更加受一些企业的重视。
迄今为止,自动导引运输车的导引方式也越来越多元化。AGV系统已经成为现代化企业工业自动化不可或缺的重要组成部分,并且已经出现了产业化发展的大趋势。随着我们国家现在物流行业的飞速发展,我国的AGV产业也在迅速蓬勃的发展,AGV的应用范围也将逐步的扩大。
1.2.2国外AGV研究现状
国外的AGV发展最先是从欧美国家开始的,那时候欧美国家的经济较为发达,所以有能力支持科技的研究发展。二十世纪五十年代,历史上第一台AGV就是在美国被改造而成的。欧美国家的AGV研究一直是以设计全自动AGV为主,这种AGV基本上不再需要外力的干预,配备有完整的一套控制系统。这一类AGV都有比较成熟的路径规划算法和避障装置,能选择最优的行驶路线,而且遇到紧急情况能预先处理,几乎能够运用于大多数的物流运输工业现场。目前欧美国家的AGV生产都是采用模块化的设计,并且对于外观上的美感毫无要求。欧美AGV生产商的特点是比较注重功能上的全面,生产出的产品导引方式、驱动方式都复杂多样,在市场上占有率很高。
二十世纪六十年代中期开始,AGV技术渐渐地被引进到亚洲区域。亚洲区域最早接触AGV技术的应该是日本,日本的AGV技术的研究发展前景甚好。目前日本和台湾的AGV生产商已经成为亚洲区域的领头羊,这一类AGV公司并不追求AGV的全自动化,恰恰相反,它们追求的是简单实用。日本和台湾的AGV企业是比较看重产品的经济效益和生产效率的,这些公司生产的AGV只能在仓储物流中扮演着简单的运输工角色,并不具备AGV的完整功能,有的就连一般的移动装载功能都不具有。这一种AGV技术一般只用于不复杂的工业生产场合,导引方式就是简单的通过磁带导航,自动导引路线的精确程度很低。 但是这类AGV技术也有明显的优点,由于相关的功能配置简单,生产所需的成本极低,比较经济实用。
1.2.3国内AGV研究现状
由于某些因素,国内的AGV技术研究起步较晚,时间上基本已经是在二十世纪七、八十年代了。而且我国AGV研究刚开始都是借鉴国外AGV的比较先进的技术,根据我国的现实背景加以改造,使其适应我国当时的工业基础情况。
据资料显示,1976年,北京起重机械研究所研究设计出了我国第一台AGV,并且实现了第一套AGVS滚珠加工演示系统。在1991年,中科院沈阳自动化研究所设计出了我国工业汽车装配线用的AGV系统,极大地提高了工业现场的生产效率。而后昆明船舶设备集团有限公司研究出我国首套激光导引无人车系统,将无线导引技术激光导引应用其中。而自从进入二十一世纪,我国的AGV事业开始蓬勃发展,各项AGV研究如雨后春笋一般涌现出来。目前,我国AGV技术的发展研究已经进入了鼎盛时期,大多数AGV技术都基本上可以实现自主研发。
第2章 AGV系统通信网络的总体设计
2.1 AGV系统设计的相关背景
本次设计的多AGV系统中AGV小车工作的区域为地下的五个仓库,即为控制中心库、AGV待检修库、充电库、检测库、存储库,AGV小车需要随时接受调度系统的指令,将位于存储区的货物送到检测库房检测。
本系统设计的功能中有如下要求,首先是所有AGV车辆在完成作业后,如果无充电需求,而且在未接收到新的指令的情况下需回到待令区等待。其次在对行驶路径的规划要求上,调度系统指令通过无线局域网络发送给AGV车辆,到达目标前车辆需对行驶路径进行智能规划,避免车辆碰撞等现象发生,自动选择最优路径。
然后在到达目标货位后,车辆平台高度与货架高度自动检测调整一致,手动将车辆上的动力装置与货架的辊道动力装置对接,系统调整完成之后,经过人工确认无误后,启动装载程序,装载的动力从AGV车辆传递到货架上面,货架上有辊道动力装置,货物从辊道上缓慢移动到车辆的载货装置的辊道上,直到货物完全载入车辆,完成取货后车辆横向行驶到行驶磁道上。
目标货物需分别在不同的检测工位完成所有的检测工序,装载完成的AGV车辆按规划好的最优路径到达检测库房,根据检测项目,智能规划不同工位的检测,使所有检测设备发挥最大检测能力,减少等待时间,同时避免同一检测工位的重复检测和某些项目漏检的情况发生,确保检测的高效性和准确性。货物完成检测后需返回库房贮存,AGV车辆会将所取货物送回至原货位或根据调度系统要求送入指定货位,存货流程与取货相反。
本系统还需要一个控制中心,能够实现对区域内的所有车辆进行实时的控制和监控。监控内容主要包括车辆当前所在位置、当前任务状态、当前剩余电量、故障情况等,使车辆在意外情况发生时,中央控制室能进行实时处理,解决问题。
2.2 AGV系统通信网络
本次设计系统中中控室通过以太网将调度计算机、数据服务器、工程师站连成一个整体,并通过无线路由与各AGV车进行通信。36台AGV车以PLC为核心,辅助单片机统进行数据采集和运算,并且PLC通过连接无线WiFi模块,在中控系统与AGV控制系统之间建立通信。其中PLC为AGV的协调控制器对整车进行控制,单片机通过CANopen接口与PLC进行通信,对磁导航传感器信息进行采集和轨迹跟踪运算处理,将处理结果发送到PLC。单片机还可以通过无线与手持式操作面板进行通信,可以现场对AGV的运行进行现场遥控。
AGV车控制系统通信网络框架如图2.1所示。
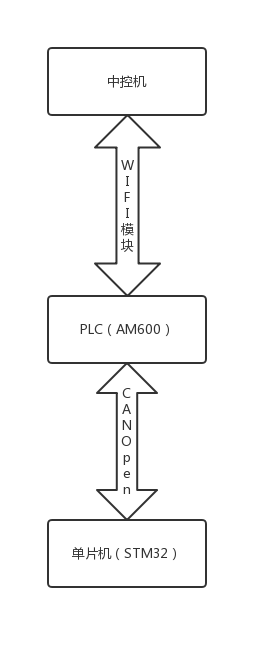
图2.1 AGV系统通信网络
2.3 AGV系统局域网设计
本次设计中共有36台AGV小车,每台AGV小车配备有一个汇川PLC作为小车控制器,每台AGV小车都接受上位机调度系统的指令,负责在工作范围的各个区域之间往返,根据指令在货物存储区取货或者存货。很明显本次设计的系统并不仅仅是一个简单的单AGV系统,而是一个AGVS系统,即为多个AGV组成的物流系统。因此系统的通信控制网络是有选择的,不是任意一种通信网络都能够正好满足要求,需要仔细斟酌。本系统的通信网络选择方案大致可分为两种,一种是有线形式的通讯,另外一种是无线通讯技术。
2.3.1有线通信技术
有线通信是一种通信的方式,是相对于无线通信来说的。目前有线通信技术已经十分普及,现代的有线通信一般来说指的就是利用金属导线、光纤等等一些有形的媒介传输数据信息的方式,光信号和电信号代表的可以是声音、图像、文字等等。目前,很大一部分有线通信都需要借助于光纤进行通信,所以现代我们常常提到的光纤通信技术其实就是有线通信技术。和无线通信技术相比,有线通信技术安全性能极佳,现代被广泛应用于国家的一些军事机密项目。但是也正是由于安全性能的提高,随之而来的是构建有线网络的复杂性,搭建通信网络所需要的开销成本也大幅上升。
2.3.2无线通信技术
本次AGV系统设计中AGV小车需要长时间工作,而且行驶路径不单一,工作范围为物流仓储里面的五个仓库区域,需要在各区域间往返进行取货和存货。由于路程较长且不唯一,而且要求的工作时间长,AGV在静止不动时才适合有线通讯方式,故而本次设计AGV小车应采用无线网络通讯。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:


![`H(Y{3$VLMC]~X{5B(B28TH](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw6080_202021975259920.png)