智慧工地人员定位系统设计毕业论文
2020-02-19 07:56:05
摘 要
定位系统的不断创新发展使得其能运用到各种不同的环境下,超宽带技术(UWB,Ultra Wide Band)是利用一种极窄脉冲进行数据传输的通信技术,具有超高的时钟分辨能力和良好的抗干扰能力,非常适合室内环境下的定位;本文以UWB技术为基本原理,设计出了一套智慧工地人员定位系统。本文针对智慧工地的特征,在研究不同定位方法的基础上,将UWB技术应用于智慧工地,分析UWB技术测距运算的特点,选择了能够对锚节点与待测节点进行测距的基于到达时间的定位方法。
本文在选取了合适的定位方法之后,讨论了常用的几种定位算法,对于理论上合适于本次设计的算法进行深入讨论,对其运算原理进行推导和分析,得出推导结果,将各个算法的计算精度进行对比择优,并综合这些算法在基于UWB的优势和不足之处,选择比较合适的卡尔曼滤波算法来满足本次设计的要求。
本设计采用到达时间的定位方法,对系统节点进行测距,通过卡尔曼滤波算法将测距信息进行运算,得出待测节点位置信息;设置多个锚节点以提高定位精度,方便其在不同人员密度的环境下提供准确定位,理论上实现了智慧工地中高精度的二维定位功能,达到了设计中的定位要求。
关键词:超宽带技术,室内定位,智慧工地,定位算法
abstract
With the continuous innovation and development of positioning system, it can be used in various environments. Ultra-wide band (UWB) technology is a communication technology that uses very narrow pulses to transmit data. It has super-high clock resolution and good anti-jamming ability, and is very suitable for indoor positioning. Based on the basic principle of UWB technology, this paper designs a set of intelligent site personnel positioning system. Aiming at the characteristics of intelligent site, this paper applies UWB technology to intelligent site on the basis of researching different location methods, analyses the characteristics of UWB technology ranging operation, and chooses a location method based on arrival time which can ranging anchor node and the node to be measured.
After choosing the appropriate location method, this paper discussed several commonly used location algorithms, discussed the algorithm suitable for this design in theory, deduced and analyzed its operation principle, obtained the deduction results, compared the calculation accuracy of each algorithm, and synthesized the advantages and disadvantages of these algorithms in UWB based, chose the more appropriate one. Kalman filter algorithm to meet the requirements of this design.
This design uses the location method of arrival time to measure the distance of system nodes, calculates the location information of the nodes to be measured by Kalman filter algorithm, sets up multiple anchor nodes to improve the location accuracy, facilitates them to provide accurate location in the environment of different personnel density, realizes the high-precision two-dimensional positioning function in the intelligent site in theory, and achieves the goal. Positioning Requirements in Design.
Key words: UWB technology, indoor location, intelligent site, location algorithm
目录
第1章 绪论 1
1.1 课题研究背景 1
1.1.1 定位技术的发展 1
1.1.2 智慧工地现状及需求 1
1.2 课题研究的目的及意义 1
1.3 室内定位技术国内外发展现况 2
1.3.1 超声波定位技术 2
1.3.2 红外线定位技术 2
1.3.3 射频识别定位技术 3
1.3.4 WiFi定位技术 3
1.3.5 UWB定位技术 3
1.4 设计研究内容及论文结构 4
第2章 智慧工地定位技术及定位方法 5
2.1 UWB定位技术知识 5
2.2 室内定位方法分析 5
2.2.1 基于AOA的定位方法 5
2.2.2 基于到达时间的定位方法 7
2.2.3 接收信号强度指示定位方法 8
第3章 定位系统的定位算法分析 9
3.1 最小二乘法 9
3.2 基于达到时间方法的最小二乘法求解 10
3.3 其他常用定位算法介绍 10
3.3.1 Fang算法 10
3.3.2 递归定位算法 10
3.3.3 卡尔曼滤波算法 11
3.4 本章小结 12
第4章 定位系统的设计 13
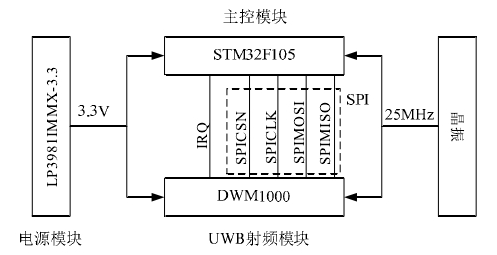
4.1 系统组成 13
4.2 硬件电路设计 14
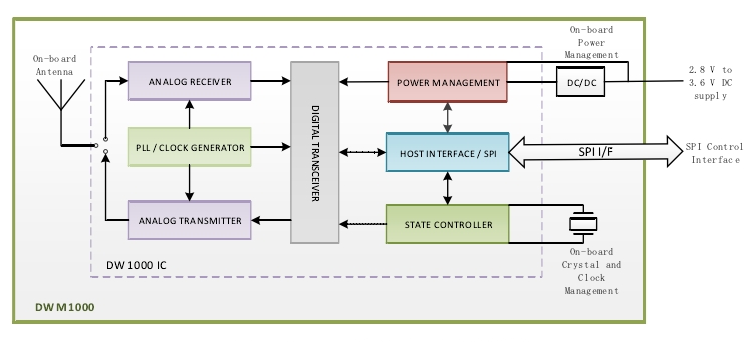
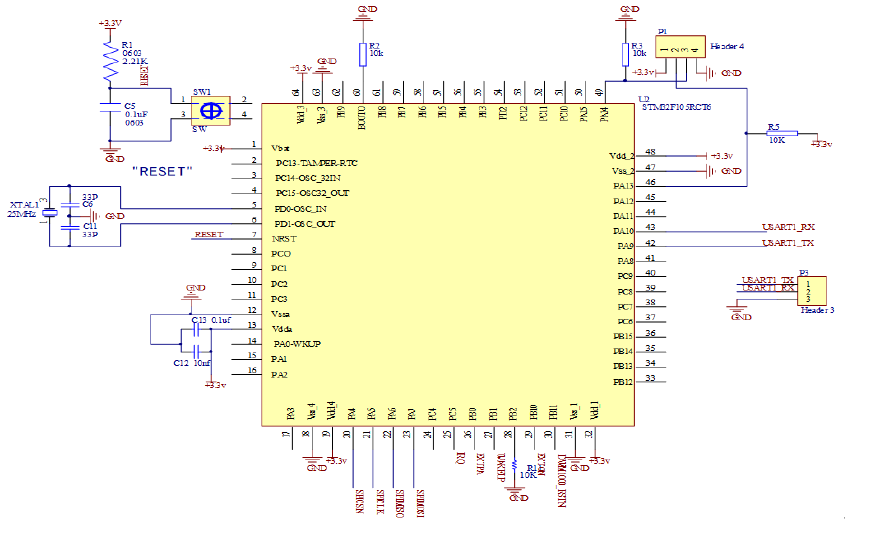
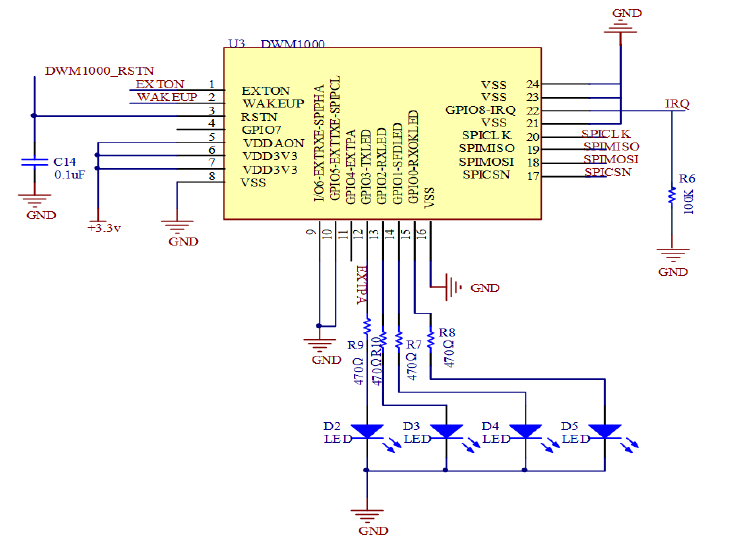
4.2.1 芯片选型 14
4.2.2 系统硬件设计原理图 15
4.3 软件设计 18
4.3.1 标签程序流程图 18
4.3.2 软件上低功耗的实现 19
4.4 本章小结 19
第5章 总结与展望 21
5.1 设计总结与心得 21
5.2 系统设计展望 22
参考文献 23
致谢 24
第1章 绪论
1.1 课题研究背景
1.1.1 定位技术的发展
在大航海时代,人类将探索的足迹延申向了大海,当时还只是运用比较简单的地图,观测天象等方法以确定自己的位置;随着科技的不断进步,人类对定位的需求也越来越广泛。定位的技术从早期的陆基无线电导航系统,经过80多年的发展,到如今非常常见的卫星导航系统,在科学技术,使用体积,造价,稳定性和精确性等方面都取得了本质上的重大进步。
在现代,很多常见的定位技术如GPS等已经作为商业用途为人们提供导航,然而随着人们对定位和导航技术的需求日益增大,尤其在相对复杂的室内环境中,如超市,仓库,地下停车场,展厅,矿井等环境中,通常需要确定移动终端的位置信息,而民用的GPS定位技术受室内复杂环境等因素的影响,无法达到室内定位的定位精度要求,因此,现如今针对室内定位,又研究出了很多方法方案,如Zigbee技术,红外定位技术,RFID技术,蓝牙技术,UWB技术等等;基于UWB的无线传感器具备传统无线传感器网络无法比拟的优势[1],在本次设计中,也将用到UWB定位技术实现智慧工地人员定位功能,以达到设计要求。
1.1.2 智慧工地现状及需求
建筑行业是支撑经济发展的重要产业之一,与其他行业相比,其在科学化,智能化,人性化等诸多方面存在明显不足;随着社会的快速发展,建筑行业迫切需要改进产业结构和改革建造模式,以使得管理和生产效率提高[2];针对上述建筑行业的种种问题,智慧工地便是为了解决这些问题而生,现在,已经将很多智能元素加入施工工地中,在多方面的共同推广和努力之下,智慧工地的普遍性已经越来越高,因其对施工人员安全的保障和施工单位管理的便利,受到越来越多商业和互联网行业的推动;但在其带给我们这么大便利的同时,其不足之处也许我们去不断研究;本次设计中为了优化施工现场的安全管理和调度问题,研究智慧工地的特征和表现形式也是设计的重点之一,在本次设计中,人员实时定位是设计的主要内容,但智慧工地需要满足的需求不仅仅是实时定位功能,还需满足人员考勤管理,突发情况报警,巡检管理等重要功能[3],以方便智慧工地的人员安全管理和调度,在功能上体现出“智慧”这一特点。
1.2 课题研究的目的及意义
近几年来,“智慧工地”这一概念的提出,标志着建筑行业开始向着智能化,信息化的方向转变[4],面对施工工地中复杂的室内环境和繁冗的施工问题,如何有效避免施工事故的发生,加强人员监管已成为智慧工地的重要环节,而在施工过程中,由于施工环境过于复杂及施工工地内外的通信条件的限制,一旦发生施工安全事故,当在无法掌握施工人员的位置信息时,极易造成救援过程中的混乱,加大救援难度,延长救援时间,极易造成不必要的损失;同时,掌握施工工地内人员的实时位置信息也能让人员调度的效率大大提升。因此,智慧工地中人员定位系统的设计,能带给各方很大的便利,对智慧工地的构建具有非常重要的意义。
如今,各种定位技术都在高速发展和创新,其中应用最为广泛的是全球定位系统(Global Position System,GPS),通过卫星覆盖几乎全球的范围,最普遍运用于行人或车辆的导航;但其在民用设备的造价昂贵和一些其他因素的限制,无法应用到无线传感网络中[5],而在室内环境中,GPS更因环境复杂而无法达到是内定位所需的精度要求。
与传统的无线通信技术相比,UWB定位技术具有明显的优势,其安全性高,传输速率较高,消耗的功率与其它定位技术相比低很多,不易受非视距传播影响,抗多径干扰能力强、系统结构相对于其他通信技术简单,UWB定位技术采用极窄脉冲来发送和接受需要传输的信息,就是因为这种特别的通信机制,使得其定位精度可以达到厘米级[6],还有设备成本廉价,结构简单等优势,UWB定位技术因此成为了室内定位的最好选择,非常适用于施工工地这种复杂多变的环境。本次设计便是为了熟悉智慧工地的工作环境,掌握UWB定位技术的基本应用原理,解决在复杂的施工环境中的人员定位问题。
1.3 室内定位技术国内外发展现况
1.3.1 超声波定位技术
超声波定位技术的实现原理是比较简单易懂的声波测距,该系统的组成部分有:主测距器和应答器,将主测距器安装在待测节点上,基本原理时相当于待测节点发送电信号,固定安装的应答器能接受该信号并发送超声波,通过计算其中的时间差,再利用定位算法进行相应的测距定位。
该定位技术在室内定位的精度非常高,系统的组成结构也相对简单,但是其缺陷也比较明显,超声波在空气中传播时,其强度并不是比较稳定的,当待测空间存在大量障碍物时,超声波极易产生衰减,故不适合运用于智慧工地当中;同时超声波也易受多径效应的影响。因此,超声波定位技术适用于近距离的定位场合。
1.3.2 红外线定位技术
该室内定位技术的实现方式分为两种,第一种是由待测节点向四周发射红外线,在待测空间内设置多个锚节点,通过锚节点接受发射的红外线,再通过定位算法对待测节点的位置进行计算;第二种是再待测空间里安装多个红外发射器和光学传感器,这些装置在待测空间里组成一张网将待测空间覆盖,由此直接对移动的目标节点进行测量。
如今,红外线定位技术的运用已经非常成熟了,其在室内定位的定位精度比较高,但其缺陷在于红外线只能进行视距传播,例如家庭中常用的红外遥控器,当被物体遮挡时便无法行使正常功能,同时也容易受到灯光,烟雾等环境影响;而在复杂的工地环境中,遮挡红外线的建筑过多,若使用红外线定位,需使用很多个接收器布置在这些建筑物前,才能保证原本的定位精度,这会使得系统定位的成本大幅提升,故而,该定位技术比较适合运用于空旷且待测目标运动轨迹比较简单的场合当中。
1.3.3 射频识别定位技术
射频识别定位的系统主要组成部分有:阅读器,应答器,其定位的基本原理是利用固定天线,采用射频的方式,将无线电信号转换成相应频率的电磁场,待测节点上的RFID标签接触到电磁场之后会产生感应电流,再将数据传输出去,利用定位算法得出待测节点的具体位置。
射频识别定位技术的作用距离比较近,但是其定位的实时性非常高,往往对待测节点的位置信息能进行快速且精确的反应,合适于救援场合;且电磁场的穿透能力较强,但在施工环境中存在复杂的环境问题,信号衰减较为严重,故其不适用于智慧工地的人员定位当中。
1.3.4 WiFi定位技术
如今,WiFi是比较成熟且应用广泛的技术,而WiFi定位技术主要有两种实现方式,第一种是利用无线网接入的锚节点对待测节点进行定位,当待测节点与三个锚节点的位置数据已经确定时,通过差分定位算法,就能实现对待测节点的定位;第二种是先录入大量的已经确定位置的一个点的信号强度,通过其他设备测出待测节点的信号强度,与录入节点的数据库进行对比,可以得出待测节点的存在区域,但这种方法对数据库的要求很高,需要巨量的“点”才能使定位精度达到要求。
WiFi定位技术不受大多数地形环境的影响,可以实现大范围的复杂的定位,但是两种定位方法的定位精度都不高,只能达到2m左右,比较适用于对人员或是车辆的定位和导航,无法进行精确定位,是比较适合于智慧工地的人员定位的一种定位方法。
1.3.5 UWB定位技术
UWB定位技术是本次设计要用到的技术,这里也会比较详细地进行介绍,该技术最早起源于国外,意大利一位电气工程师马可尼(Guglielmo Marconi)用电磁波将摩尔斯电码发送到2 km外[7],直到20世纪初,UWB定位技术的优势受到了多方的关注,对该技术的研究得到的极高使用价值以至于其在该阶段获得了商业认可。
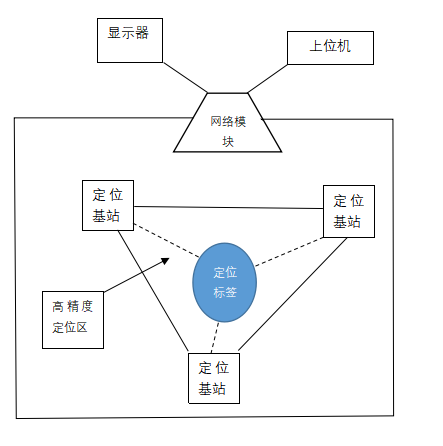
现在,对UWB技术研究而产生的商用产品也越来越多,大多数产品的定位精度都达到了厘米级,在对这些产品的了解下,发现超宽带定位技术的基本组成部分有:定位基站,定位标签和服务器上的地图软件与算法程序;这也让我对本次设计的系统有了一个框架上的了解。
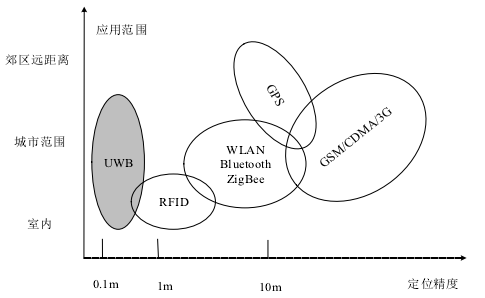 现阶段常用的定位精度对比及应用范围如图 1.1 所示:
现阶段常用的定位精度对比及应用范围如图 1.1 所示:
图 1.1 常用室内定位技术精度对比及其应用范围
1.4 设计研究内容及论文结构
本次设计针对目前施工工地存在的安全管理及调度优化问题,设计一套智慧工地人员定位系统,通过对智慧工地的现状及其需求的了解,结合当下常用定位技术的优缺点,选择了具有响应及传输速率高、能进行非视距传播、适用范围较广等优点的UWB技术来实现本次智慧工地人员定位系统的设计;借助发展多年的研究基础,本文借助UWB定位技术的特点和智慧工地人员定位的需求,提出了一套理论上符合要求的定位系统。论文接下来将介绍关于室内定位的一些定位算法;本次设计定位系统的实现,系统的组成及其软硬件的设计;最后,将会对本次设计进行总结,总结本次设计完成的工作,反思设计当中存在的不足之处以进一步改善自己学习过程中存在的问题!
第2章 智慧工地定位技术及定位方法
本次设计定位的基本手段就是获取锚节点与待测节点的位置信息,通过已知的固定锚节点的位置和相对于待测节点的位置可以建立相应的方程,从而求得待测节点的位置坐标,本章将介绍UWB技术的一些基本知识以及常用的一些测距算法。
2.1 UWB定位技术知识
超宽带技术采用极窄脉冲来发送和接受需要传输的信息,UWB信号拥有两种不同的定义:
相对带宽:
 (2-1)
(2-1)
绝对带宽:
 (2-2)
(2-2)
在式(2-1)和式(2-2)中, 和
和 分别表示UWB 信号在相对于其功率峰值下降 10dB 处的高端频率和低端频率。
分别表示UWB 信号在相对于其功率峰值下降 10dB 处的高端频率和低端频率。
如今,UWB技术越来越成熟,运用范围越来越广泛,现在其主要实现技术分两种方式:
冲激无线电技术:
冲激无线电技术是一种经典的UWB实现方式,通过极窄脉冲信号对所需数据进行传输,也是因为其通信机制的独特性,使得接收机的结构与造价大大降低,接收机的表现形式通常是一个检测装置。
多频段UWB技术:
多频段UWB技术是通过划分多个子带来实现的,其子带源于有效的UWB频谱,且绝对带宽仍然满足不小于500MHz的要求,由于这些子带的频率不同,该技术可以同时发送多个频带且互不干扰,故其传输效率会有进一步的提升。
2.2 室内定位方法分析
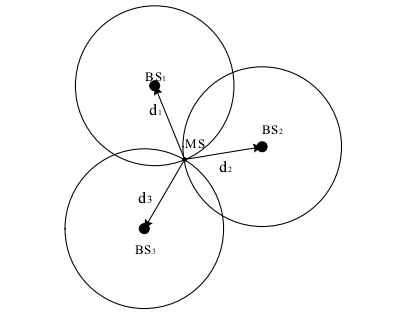
2.2.1 基于AOA的定位方法
基于达到角度(AOA)的定位方法[8]的基本原理是通过待测节点发射方向角信息,固定的锚节点接收到该信息之后能计算出待测节点与锚节点的角度偏差,对于平面上的定位来说,当存在两个不同相对角度的锚节点时,将其其偏差角度顺着方向线延伸,两条直线的交点便是待测节点的位置,其基本原理如图 2.1 所示。
平面定位时需建立一个平面直角坐标系,首先确定BS1,BS2的坐标,现假设其坐标分别为( ,
, ),(
),( ,
, ),锚节点与待测节点的相对偏差角度分别为
),锚节点与待测节点的相对偏差角度分别为 和
和 ,待测节点的位置未知,设定为(
,待测节点的位置未知,设定为( ,
, ),于是可得方程组:
),于是可得方程组:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: