智能无人船控制系统设计毕业论文
2020-02-19 09:02:54
摘 要
随着计算机、信息、通讯与人工智能技术的发展,以及航运业迫切的技术需求,无人船的优势逐渐引起了人们的重视。无人船早在上个世纪80年代就已经在国外发展,起初用于军事用途,但随着技术的发展,无人船的功能逐渐完善,被应用到各个领域。
本文设计的无人船控制系统由多个模块构成,各个模块具有其特定的功能,控制系统主要包括无人船船体模块、通信模块、导航定位模块、运动控制模块、信息采集模块和动力装置模块。本文的无人船船体选择云洲智能公司生产的SE40全自动无人监测船,无人船主控制系统采用S3C2440微处理器,无人船的驱动控制系统采用STM32F103VCT6处理器作为集成控制板;无人船通信模块采用4G通信系统和卫星通信混合使用,有效解决海上航行信号不稳定的情况;无人船的定位模块采用GPS定位的方式,将船舶航行轨迹实时反馈于电子海图上;无人船装载了毫米波雷达传感器,让无人船航行时拥有自动避障的能力。无人船的动力装置模块可采用锂电池供电。无人船还装载了视频监控系统,可实现岸基对无人船航行水域的实时监控。
关键词:无人船;控制系统;4G;通信链路;AIS;传感器
Abstract
With the development of computer, information, communication and artificial intelligence technology, as well as the urgent technical needs of the shipping industry, the advantages of unmanned ships have gradually attracted people's attention. Unmanned ships have been developed abroad since the 1980s and were originally used for military purposes. However, with the development of technology, the functions of unmanned ships have gradually improved and applied to various fields.
The unmanned ship control system designed in this paper consists of multiple modules, each module has its specific functions. The control system mainly includes unmanned ship hull module, communication module, navigation positioning module, motion control module, information acquisition module and power device module. . The unmanned ship hull of this paper selects the SE40 automatic unmanned monitoring ship produced by Yunzhou Intelligent Company. The unmanned ship owner control system adopts S3C2440 microprocessor. The unmanned ship's drive control system adopts STM32F103VCT6 processor as the integrated control board; The ship communication module adopts 4G communication system and satellite communication to effectively solve the instability of the sea navigation signal; the positioning module of the unmanned ship adopts the GPS positioning method to feedback the ship's navigation track to the electronic chart in real time; the unmanned ship Loaded with millimeter-wave radar sensors, the unmanned boat has the ability to automatically avoid obstacles when sailing. The powerplant module of the unmanned ship can be powered by a lithium battery. The unmanned ship is also equipped with a video surveillance system that enables real-time monitoring of the unmanned ship's navigational waters by shore-based.
Key words:Unmanned ships;Control system;4G; Communication links;AIS;sensor
目录
第一章 绪 论 1
1.1课题研究背景 1
1.2课题研究意义 1
1.3目前国内外发展现状 2
1.31国内无人船发展现状 2
1.32国外无人船现状分析 3
1.4 论文主要研究内容 4
第二章 无人船控制系统总体框架设计 6
2.1 无人船船体模块 6
2.2 无人船通信模块 7
2.21 4G通信 7
2.22 卫星通信 8
2.23 4G、卫星混合通信 8
2.3 无人船定位导航模块 9
2.31 GPS定位简介 9
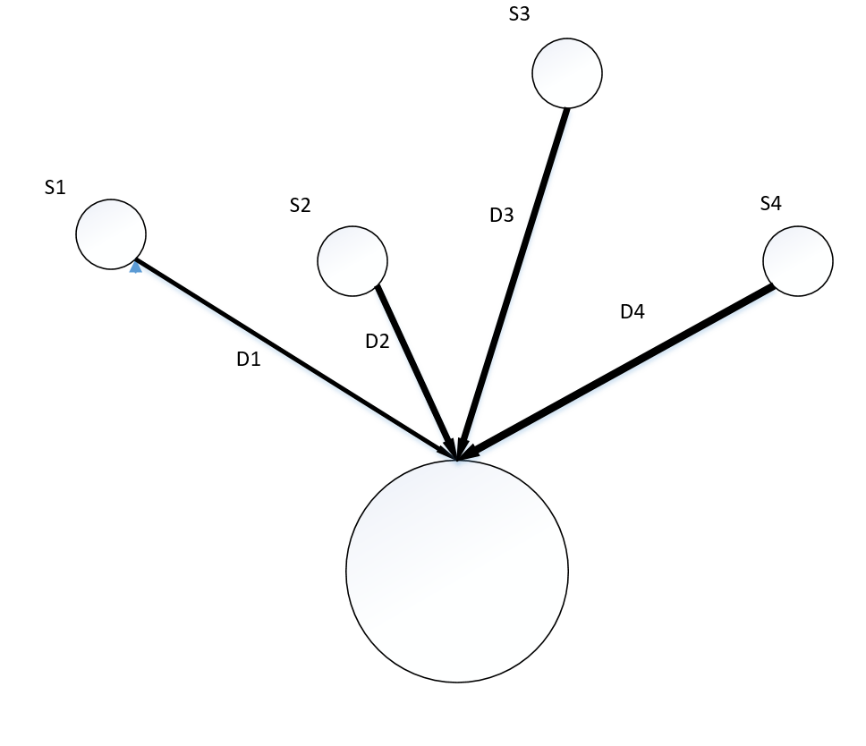
2.32 GPS定位原理 10
2.33船载系统定位功能的实现 11
2.4 运动控制模块 11
2.41 ARM处理器 11
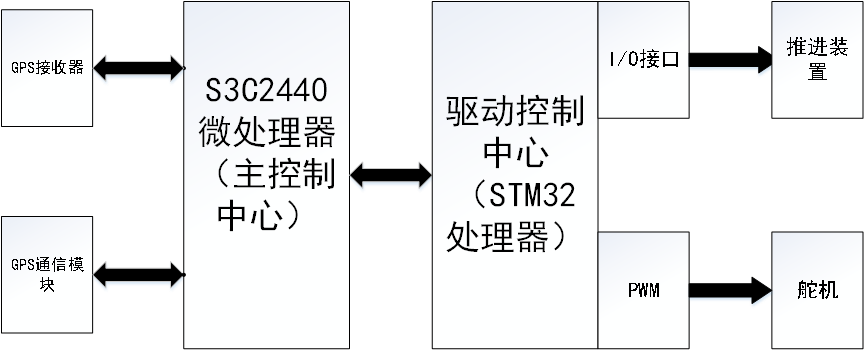
2.42 无人船主控制中心处理器 11
2.43 无人船驱动控制中心处理器 11
2.5 无人船信息采集模块 13
2.6 无人船动力装置模块 13
第三章 多种传感器的选型 15
3.1 无人船环境感知 15
3.2 视觉传感器 16
3.21 激光测距传感器 16
3.22 红外测距传感器 16
3.23 雷达微波测距传感器 16
3.24超声波测距传感器 17
3.25 图像传感器 17
3.3 雷达 17
3.31 毫米波雷达 17
第四章 4G技术和AIS构建船-岸通信链路 19
4.1 AIS基本原理 19
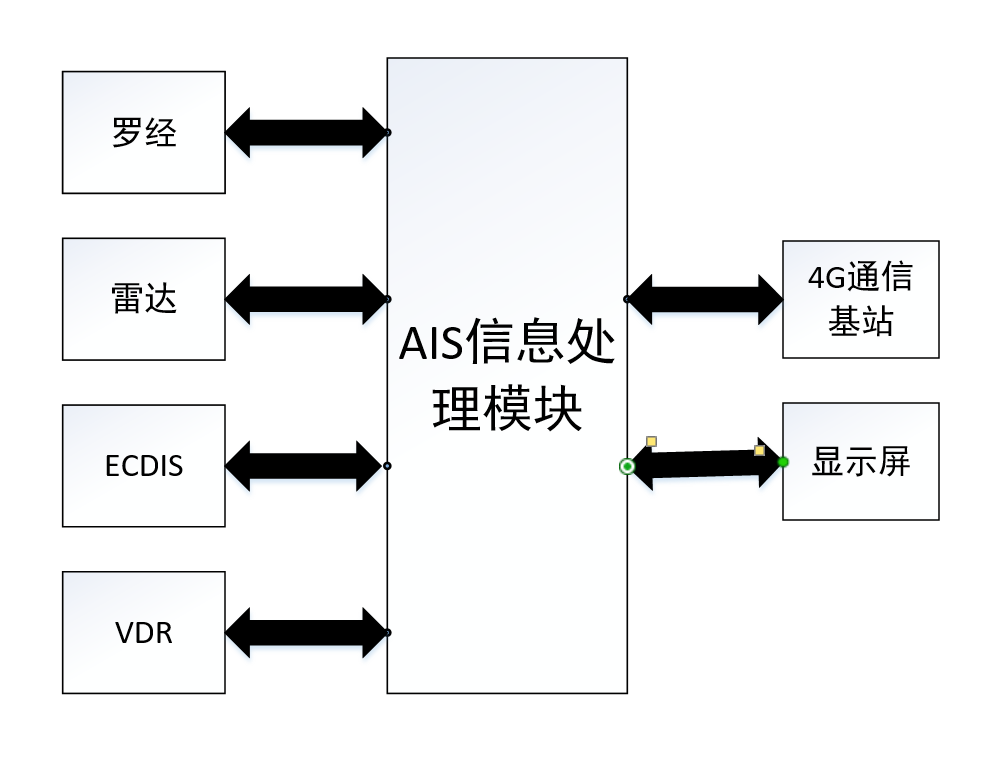
4.2 AIS基本结构 19
4.3 4G技术和AIS构建船岸通信链路 20
第五章 PID参数整定航迹控制算法分析 22
5.1 PID调节整定航迹 22
5.11 PID调节的优缺点 22
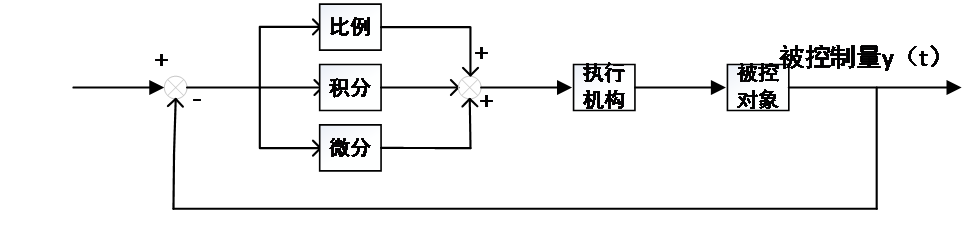
5.12 PID调节的原理与仿真 22
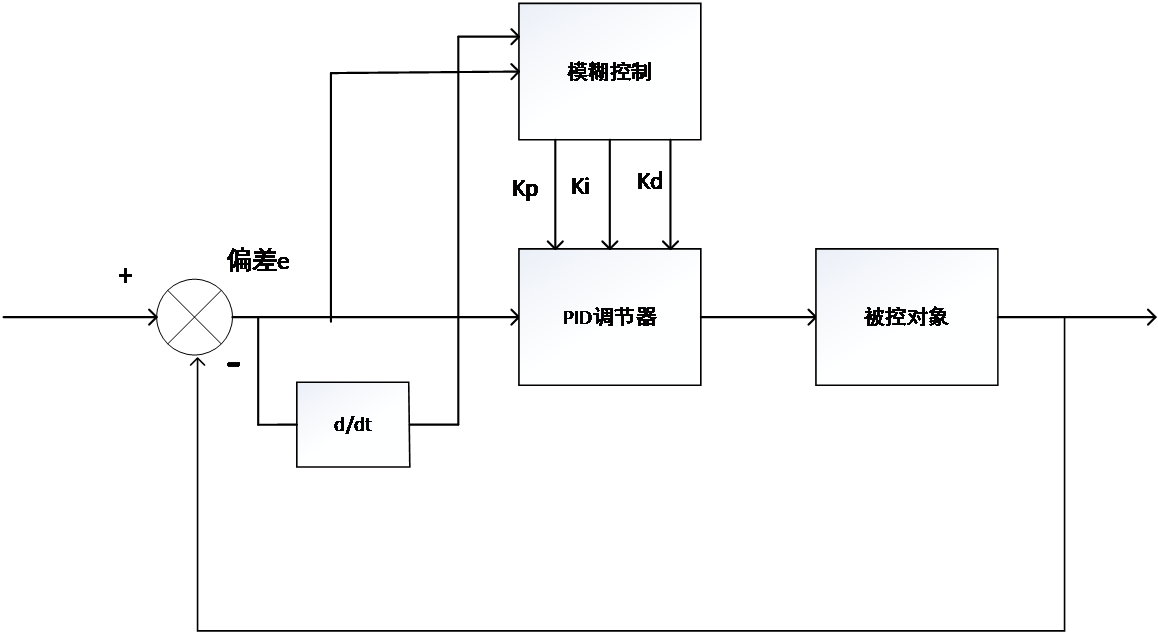
5.2 模糊PID调节 23
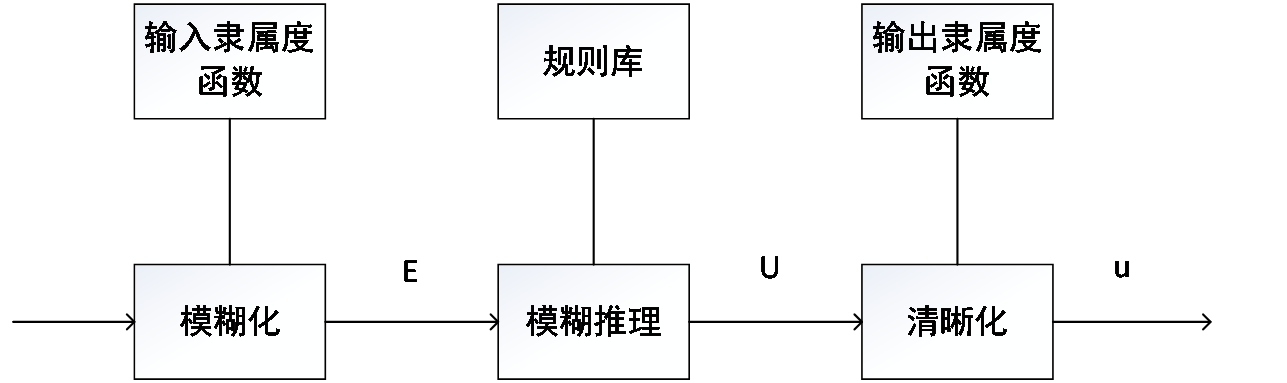
5.21 模糊PID控制原理 23
5.22 模糊PID系统设计 24
第六章 结论与展望 30
6.1 论文过程总结 30
6.2 对无人船研究方向的展望 30
参考文献 31
致谢 33
第一章 绪 论
1.1课题研究背景
随着科技的发展,无人汽车开始进入到大家的视野。谷歌公司最先开始研究无人汽车,越来越多的公司也开始进军无人汽车领域。无人驾驶技术给汽车行业带来了全新变革,新技术的出现给人类生活带来了方便和便捷。
无人机也在走向人们的生活,无人机的发展可谓是人们有目共睹的,无人机按照其应用的分类可以分为军用和民用,人们现在已经可以在商场或者网上商城中购入属于自己的无人机进行航拍、自拍、测绘、灾难救援、快递等应用。而军用无人机方面可以分为无人机和靶机,军用无人机的有效运用不仅能够以更低的成本采集到更多有用的军事信息,更能减少不必要的伤亡。
随着无人汽车和无人机的发展,无人船慢慢走进人们的生活中。船舶行业在未来很有可能进入无人控制时代,无人船的研发正在努力走向实用性和普遍性。英国罗-罗公司近期正在着手研发智能无人船并不断进行试验,他们对无人船的态度十分乐观,认为无人船很快会迎来普及。
1.2课题研究意义
由于油价大幅波动、造船订单竞争激烈、船舶排放量大, 近期造船业正在推动安全、节油的理念,这样才能够应对国际法规对船舶环保技术的要求, 加强船舶设计能力。航运公司也正集中精力在激烈的物流竞争中提高船舶的营运效率,引进高经济性的船舶, 以确保安全运输和成本竞争力。此外, 近年来ICT (信息通信技术) 技术的快速发展也在加速船舶的数字化和自动化。例如, 海事组织 (国际海事组织) 推动电子导航、将信通技术纳入造船、航运业 、智能船舶和先进造船商的无人自主船舶研发活动。
智能无人船主要拥有两方面的优点。
一方面,船上的很多设备和生活设施,如卧室,餐厅,救生艇,厨房等等都是为人服务的。所以在无人的状况下,船体重量能够减轻很多,从而减少了船舶航行阻力,从而节省了运行成本,增加货物装载空间。
另一方面,船上绝大多数安全事故都是因为人为过失或人工操作不当引起的,海上事故的绝大多数都是人为造成的。而在无人船操作系统中,船舶的操作和各项控制主要由控制精度高的主控制系统和驱动控制系统负责,岸上的控制指挥操作条件相对来说更好,因此极大提高了船舶的安全系数。
1.3目前国内外发展现状
1.31国内无人船发展现状
国内无人船领域发展较国外较晚,但随着科技的快速发展,无人控制和无人通信技术逐渐可以达到无人船的标准,国内很多公司也开始结合现代科技研究无人船在各个领域的应用。无人船主要用于在海洋环境监测、环境测绘、水生物监测、灾害预防等方面。
在众多国内着手研究无人船的公司中,云洲智能无人船集团可谓是其中的翘楚。它从2010年的白手起家,打开了中国无人船艇领域的先河,在无人船艇自主航行、感知避障、协同控制、系统集成等多项领域达到世界先进水平,它的主要产品有M75水上救助无人艇、M40多用途无人船、SS30全自动采样船等等。随着技术的不断成熟,云洲集团冲一开始的主打民用船舶转而向军用船舶方向发展,先后自主研发了中国第一艘海洋调查无人艇、隐身无人艇等,为在军用海洋调查方面做出了重大的贡献。
在2018年11月30日,首届自主船舶发展论坛在珠海成功举行,这次论坛由汇聚了国内无人船的先驱公司与政府部门、船级社、多所致力于无人船技术研究的大学的专家学者一齐讨论无人船未来的发展走向,讨论无人船在发展存在的机遇和挑战,为国内自主船舶发展献计献策。
除此之外,亚洲首个无人船海上试验场正在珠海万山筹备简称若成功建成,该海上试验场主要用于测试无人船的导航、通信、感知等模块,若该试验场成功建成,将是世界上最大的无人船舶海上试验场。
另外,在2018年自主船舶发展论坛期间启动研究的命名为为“筋斗云”的无人驾驶货船,预计在不久后能投入使用,该船载运量能达到500吨,采用电力推进,续航能力强,该船所配备的网络通信系统、自主导航系统、路径跟随系统、信息采集系统等都位于世界科技前列。
1.32国外无人船现状分析
无人船技术发展于二战时期,国外许多国家很早就开始研究无人船技术,而国内对此技术接触尚晚,所以各方面尚且不如国外的技术成熟。
美国军方的“斯巴达”高速无人舰可谓是军用无人舰中的典型,该无人舰研发的初衷就是为了防止操作人员受到伤害或者发生意外。“斯巴达”高速无人舰长7米或11米,可以持续工作48个小时。它主要用于收集情报、监视、侦察、保护等用途。“斯巴达”高速无人舰如下图1.1所示。

图1.1 “斯巴达”高速无人舰
2006年以色列拉斐尔公司研发了“保护者”号无人船,该船装有雷达导航系统,配备有武器,能够实现远程定向操控打击的目的。“保护者”号无人船能够实行监测、侦察、救援、反恐等多项用途。另外,埃尔比特公司为“银色马林鱼”号无人船研制了一种“自主舵手系统”,它能够合理地选择路径和速度,从而在低燃油消耗下高效地运行并精准航行。
与国外先进的无人船技术相比,国内无人船技术仍有很大的改进空间。
国内无人船要实现智能化:在无人船作业过程中,若超出了岸基控制中心遥控范围或信号不稳定的状况下,无人船为避免危险的发生,应该具备自主航行的能力。
要实现无人船的高可控性:只有在拥有出色的控制技术,船舶才能更高效、更快接地应对各种指令,完成相对应的任务。
要实现无人船的高稳定性:无人船要在充满危险的大海中航行,随时都面临着各种不确定因素,比如大风浪、暴雨,若无人船的稳定性不佳,随时都会被风浪所倾覆。
也要考虑无人船的成本:无人船不仅仅只针对与军事用途,随着科技的发展,民用无人船可能更具普适性,所以其成本不宜过高。无论是无人船的开发成本还是维护成本,做好平衡都是关键。
1.4 论文主要研究内容
本文主要分四个方面进行叙述。
第一章叙述了无人船的研究背景和研究意义,并且对国内外无人船的发展现状进行了分析。
第二章设计了无人船的总体框架结构。将无人船根据其功能分为各个模块,对每个模块进行选型、分析,重点介绍了无人船通信模块和定位导航模块。
第三章对无人船的环境感知传感器进行选型,该传感器应具备使船舶及时做出自动避让的功能。结合视觉传感器和雷达传感器的优点和缺点,最终选用了毫米波雷达传感器。
第四章对无人船的通信模块进行详述,主要分析了4G通信技术结合AIS定位技术实现船舶与岸基间的信息通信,实现岸基控制中心对无人船的实时动态监测。
第五章对无人船的航迹算法进行分析,采用PID参数整定达到航迹自动跟随的效果。
第六章对本文的工作进行总结,对本文中存在缺点和不足进行归纳,并对接下来的研究方向进行展望。
第二章 无人船控制系统总体框架设计
2.1 无人船船体模块
本文采用的无人船船体为云州智能公司所生产的SE40全自动无人监测船,在船体模型基础上设计控制系统。该无人监测船主要用于水文流量流速测量、水下地形测绘、水下暗管探测、水质采样、水质监测等,它采用M型流线船体,推进器与船艇平齐,使得船体易收放;该无人艇的智能避障系统能够检测50m内的船舶或障碍物;该船单次航行能够完成两种或者两种以上的作业。
 SE40全自动无人监测船搭载了可变焦高清摄像头、采样系统、水质在监测仪、ADCP、侧扫声纳、单波束等精密仪器。且自带WIFI信号,可以和其他设备互联,内置数传电台、GPS;既可以用遥控器控制,也可以用转换为基站控制。
SE40全自动无人监测船搭载了可变焦高清摄像头、采样系统、水质在监测仪、ADCP、侧扫声纳、单波束等精密仪器。且自带WIFI信号,可以和其他设备互联,内置数传电台、GPS;既可以用遥控器控制,也可以用转换为基站控制。
图2.1 云洲SE40全自动无人监测船
表2.1 SE40全自动无人监测船各项性能数据
船体材料 | 纳米碳钎维复合材料 |
船体尺寸 | 1.50/0.7/0.40m |
抗风浪等级 | 4级风1米浪 |
空载重量 | 32kg |
负载能力 | 25kg |
吃水深度 | 0.2m |
航速 | 工作航速2m/s,续航4小时 |
电池 | 33V,44AH,2组 |
通信 | 遥控通信2km |
避障 | 最大探测距离50m |
驱动形式 | 直流无刷电机驱动 |
2.2 无人船通信模块
无人船控制系统主要可以分为三大部分:岸基控制系统、中间基站(云服务器端)和船载控制系统,无人船端通过GPS或其他定位方式定位后将位置信息发送给中间基站(云服务器端),中间基站将信息转发给岸基控制中心,岸基控制中心将收到的信息进行一系列运算得出无人船的最佳路径并将路径信息通过中间基站发送给船载控制系统,无人船接收到路径信息后自主航行。
2.21 4G通信
移动通信技术从第一代的模拟通信系统发展到当今的数字通信系统,在第二代通信技术中,从一开始较为普及的GSM系统到后来的3G、4G,又到近期发展的5G通信系统,不可不谓移动信息技术发展正在经历一个从量变到质变的过程。GPRS技术是功能处于2G与3G之间的通信技术。GPRS通信较GSM通信来说传输速度大为提升,且避免了掉线了缺陷。因GPRS通信采用分组交换的传输模式,用户仅在发送或接收资源的同时占用资源,在其他情况下,多个用户可以占用同一信息传输通道,达到了资源的高效利用,从而降低了成本
目前无线通信技术主要以GPRS技术为主,但随着科技的不断进步,虽然GPRS技术工作稳定,传输距离长,也只能进行简单的数据传输,无法实施例如视频实时监控的复杂的数据传输,所以本文采用4G通信技术代替GPRS通信技术,4G传输速度相对于GPRS传输有了一个质的飞跃,4G能够以100Mbps的高速下载,并且能够拓展无人船的信息传输距离,优秀的双向信息传输使得无人船还能进行视频监控。
但4G通信因受到基站的限制,在复杂的地形或偏远的海域中,信号很难覆盖到,造成了航行中信号差、无信号的情况,考虑到此因素,4G通信不适合单独用作无人船信息传输。
2.22 卫星通信
卫星通信是借助人造地球卫星进行的通信。通常包括人造地球卫星和无线电基站两部分。其中无线电基站负责发射无线电信号至人造卫星,经过卫星的放大后转发给地面上的用户。卫星通信的传输距离很远,因此价格较低,且精度较高。因卫星监测的范围广,卫星通信能够在非常远的距离下进行通信,且不受环境和地形的限制,能够有效解决采用4G通信时所面临的信号差、无信号的情况。但卫星通信的传输延迟大,不能够满足无人船的实时监控需要,且卫星通信在高纬度地区难以接收到信号。所以,单独采用卫星通信用作无人船的信息传输也行不通。
2.23 4G、卫星混合通信
卫星通信在传输效果和成本上远远不及4G通信优秀,但卫星通信能够弥补4G通信的通信距离短、传输不稳定的缺陷。在结合4G通信之前,人造卫星部分仅仅相当于信号的中转站,并不在通信网络之中。当人造卫星接入互联网之后,通信的范围会大大增加,且随着卫星的接入,传输空间容量也会增加,在用作无人船信息传输模块后,能够满足船岸双向的稳定的信息交流。
2.3 无人船定位导航模块
常用的用于定位的技术有: 基站定位、惯性导航定位、卫星定位等。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: