绞吸式挖泥船绞刀电机的速度控制毕业论文
2020-02-19 09:06:42
摘 要
Abstract 6
第1章 引言 7
1.1 研究背景及意义 7
1.1.1 课题的研究背景 7
1.1.2 课题意义 8
1.2 国内外研究现状 8
1.2.1 绞吸式挖泥船国内外发展水平 8
(1)国外挖泥船研究及发展现状 8
(2)国内挖泥船研究及发展现状 9
(3)挖泥船总体发展趋势 11
1.3 课题技术路线 11
1.4 本文所做主要工作及内容 12
第2章 绞刀模型及受力分析 13
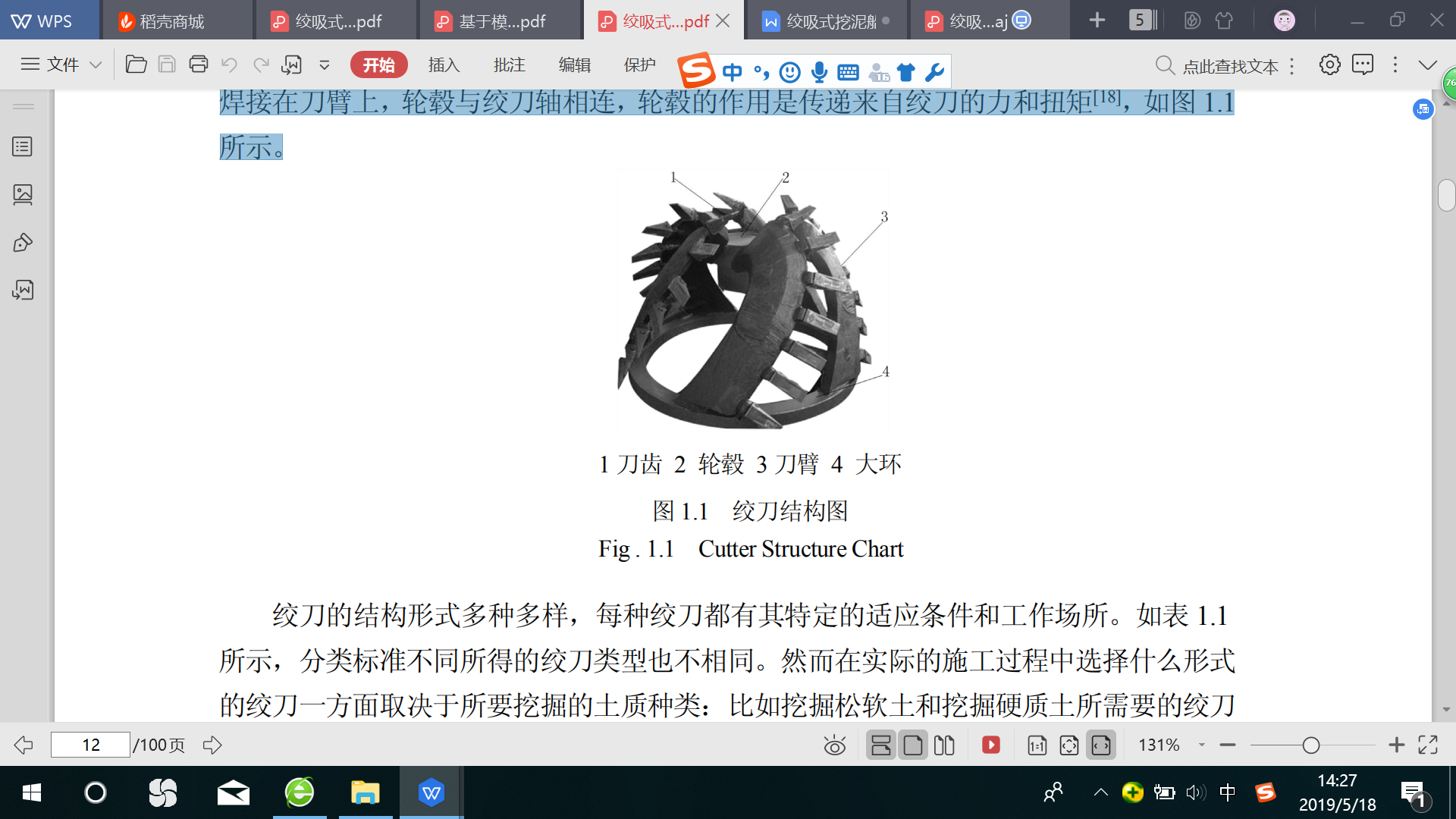
2.1绞刀的基本结构 13
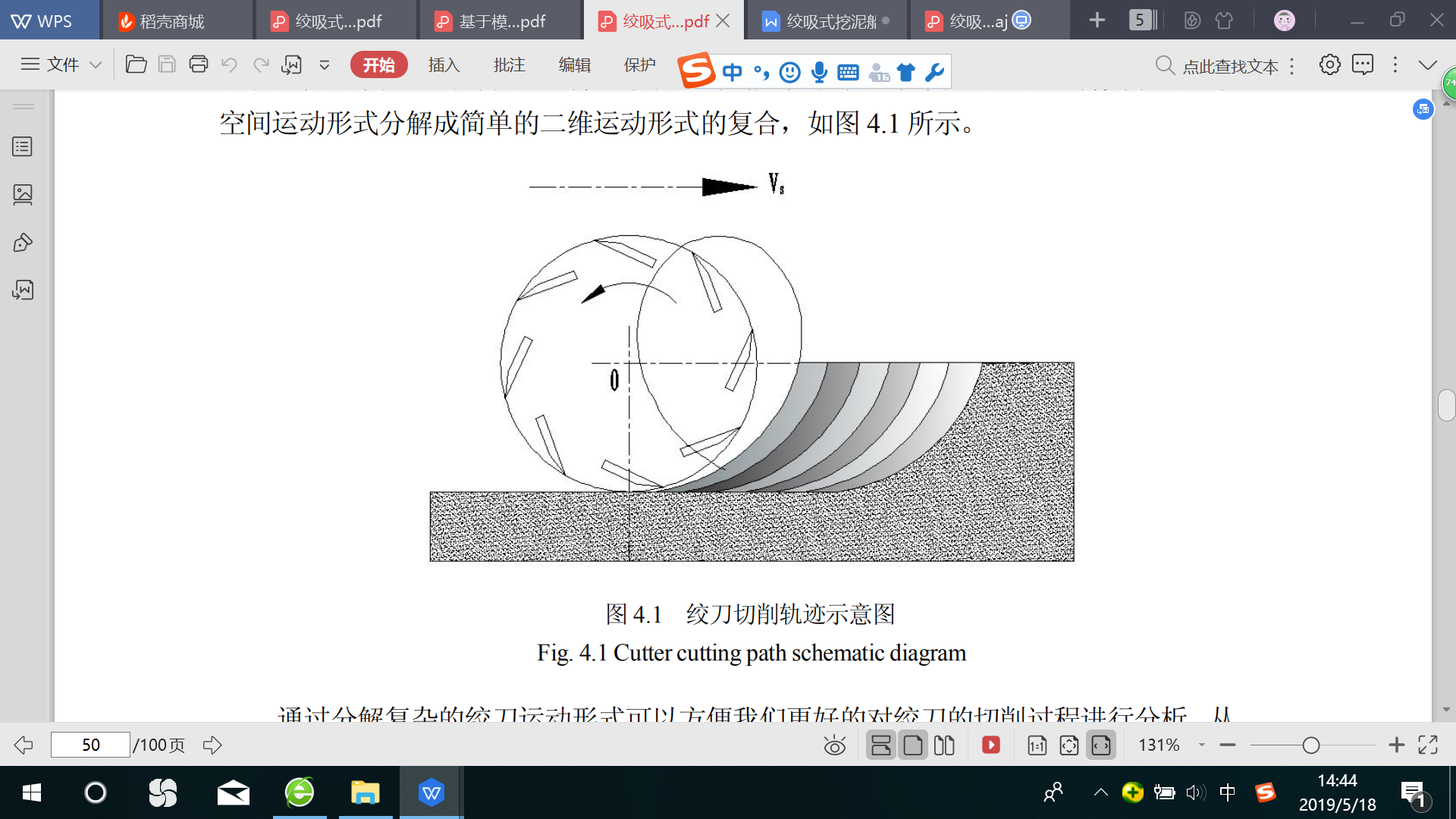
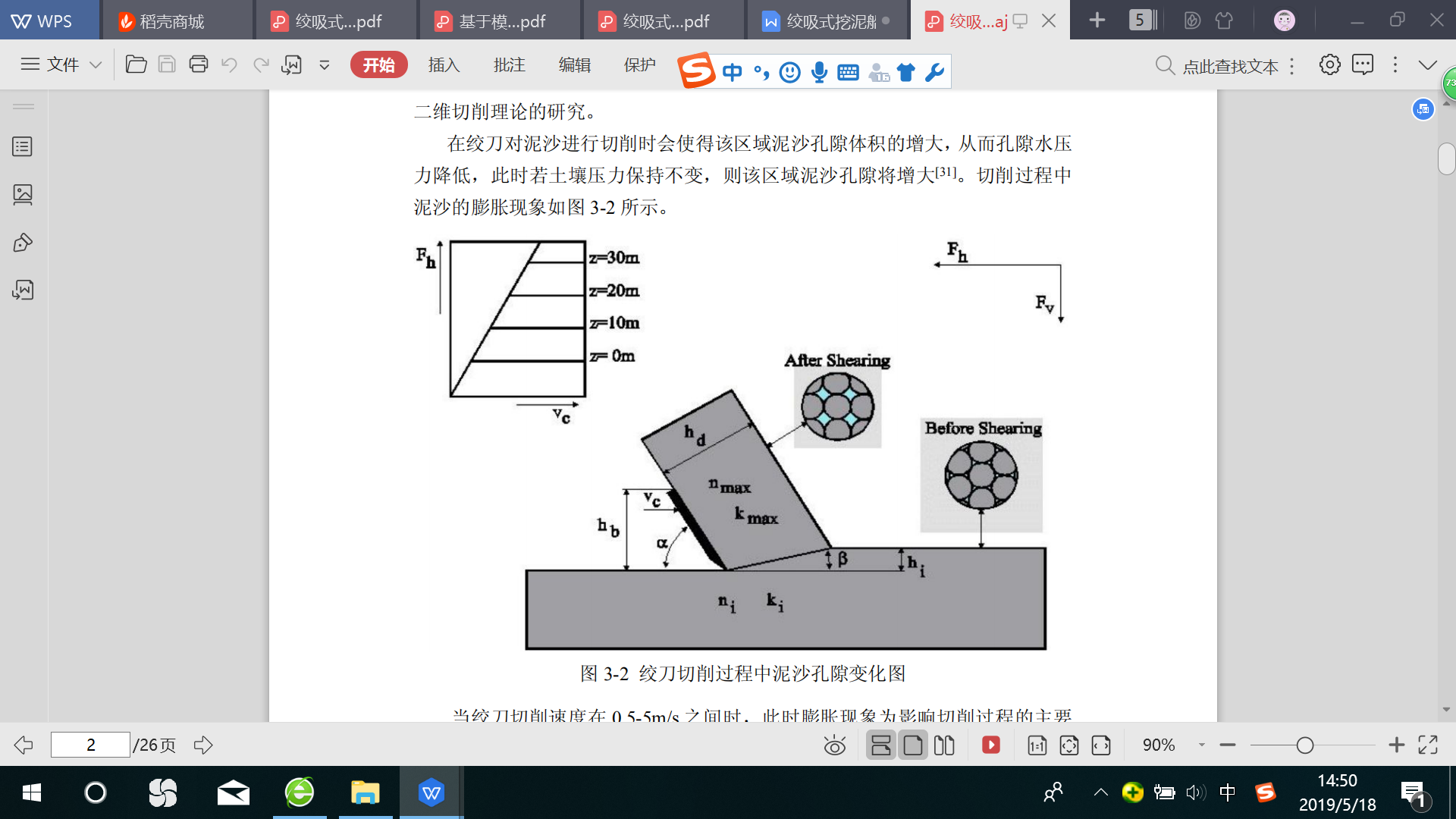
2.2绞刀二维切削过程 13
2.2.1绞刀切削轨迹描述 13
2.2.2绞刀受力情况分析 14
2.3刀齿受力分析 17
2.3.1刀齿受力分析 17
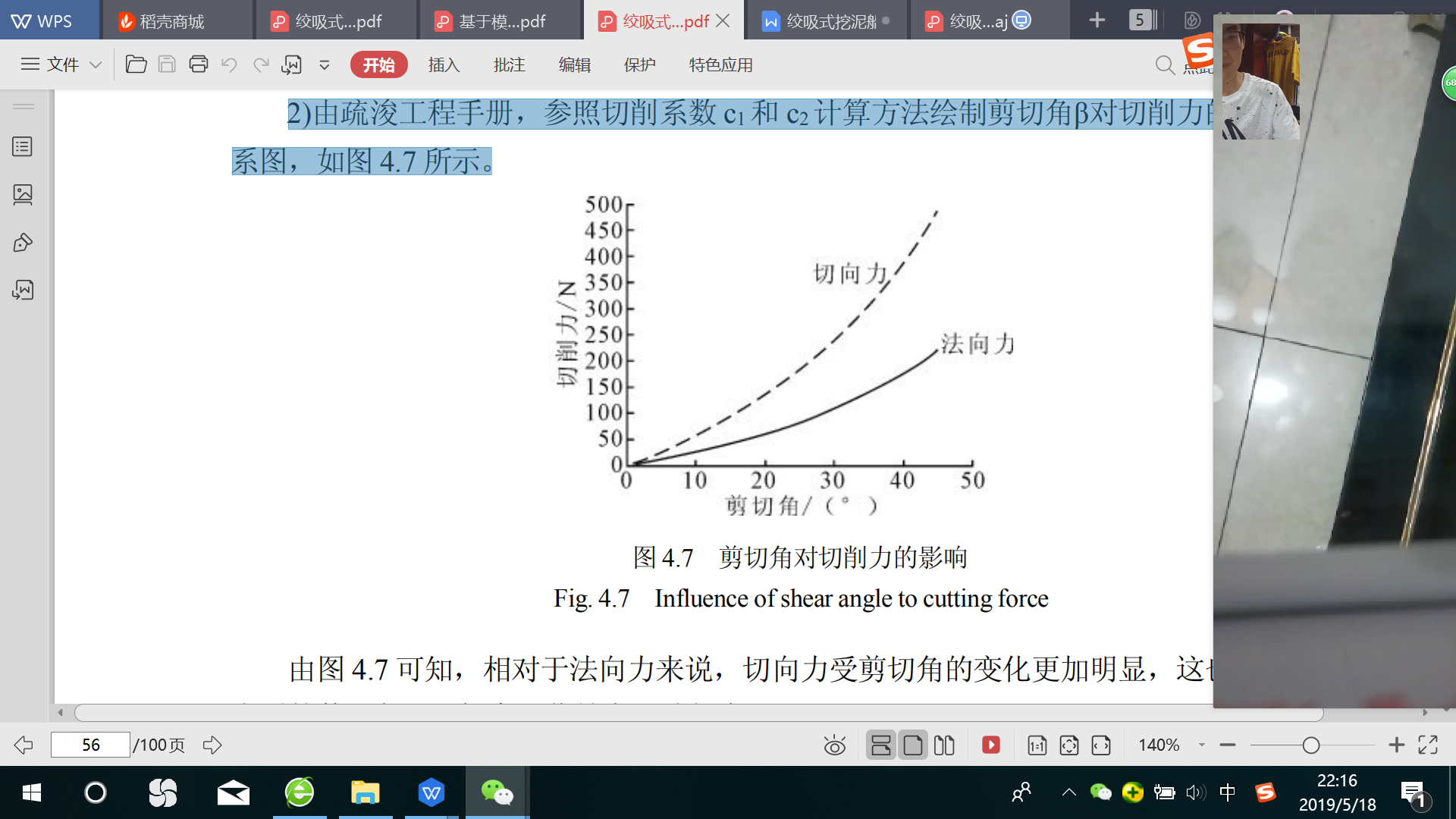
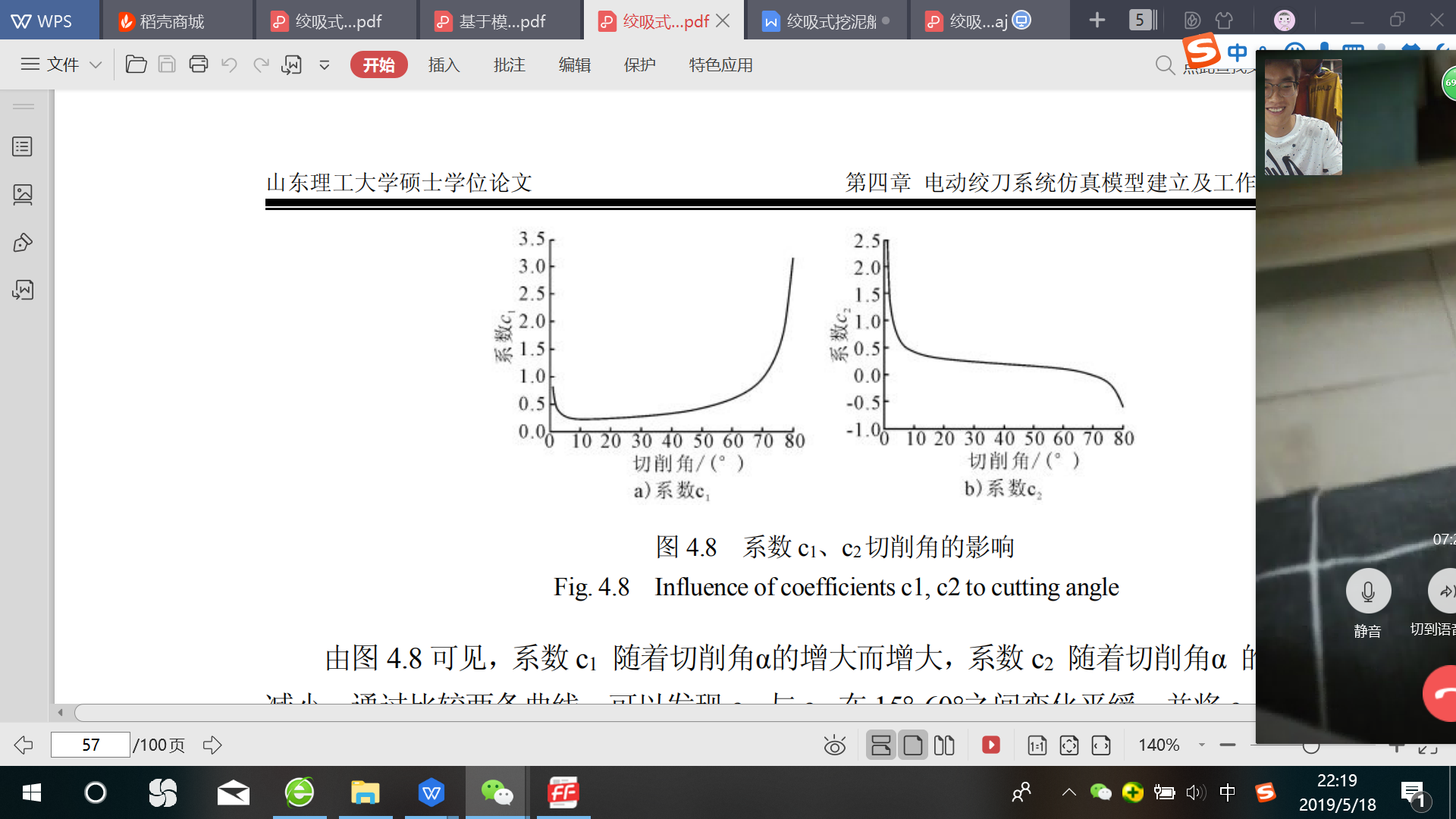
2.3.2切削角度分析 18
2.4本章小结 19
第3章 电动机建模 20
3.1直流电动机数学模型 20
3.2交流电动机数学模型 22
3.3两种绞刀电机的比较 23
3.4本章小结 24
第4章 转速控制器的设计 25
4.1 传统PID控制原理 25
4.2 模糊控制原理 26
4.2.1 模糊控制器结构 26
(1)输入信号模糊化环节 26
(2)模糊控制知识库 26
(3)模糊推理环节 27
(4)解模糊环节 27
4.2.2 模糊控制器设计方法 27
4.3 模糊PID控制器的设计 28
4.3.1模糊PID控制原理 28
4.3.2转速模糊PID控制器设计 28
4.3.3 隶属函数和模糊控制规则 29
(1)模糊PID控制器的论域与隶属度函数 29
(2)PID控制器参数自整定原则 29
(3)模糊控制规则 30
4.4 本章小结 30
第5章 总结 32
参考文献 33
致 谢 35
绞吸式挖泥船绞刀电机的速度控制
摘 要
传统的绞吸式挖泥船绞刀的驱动模式由液压马达进行驱动,随着绞刀驱动技术的不断革新,绞刀驱动逐渐由液压马达转向电动驱动。以电动机作为驱动机构的绞吸式挖泥船驱动系统具有工作效率高、控制方便、精度高、对疏浚环境污染小等优点。现代绞吸式挖泥船驱动技术与传统的驱动技术相比,电机驱动更适合时代的发展。所带来的电动机控制问题是目前电力驱动需要重点解决的问题。本文的研究对象是绞吸式挖泥船绞刀驱动系统,基于电动机控制策略对绞刀电机转速控制方面进行了研究。
以绞刀的基本结构作为理论依据,结合二维切削理论,对绞刀进行了受力分析。为了研究绞刀电机的速度控制,建立绞刀驱动系统模型,搭建绞刀电机数学模型,对绞刀电机转速控制策略进行分析研究。基于绞刀电动机工作特性建立电动机转速控制系统模型。对PID控制理论和模糊控制理论进行研究,对比分析了经典PID控制与模糊控制的特点和应用范围。
对比分析结果表明,绞刀驱动系统采用模糊PID控制具有调速性能良好,整个系统不仅具有快速响应的优点,还具有在复杂工况下系统控制更加平稳的优点。
关键词:绞吸式挖泥船;绞刀建模;电机转速控制;模糊PID控制
Speed control of cutter motor for suction dredger
Abstract
The driving mode of the traditional suction dredger cutter is driven by the hydraulic motor. With the continuous innovation of the winch driving technology, the winch drive gradually changes from the hydraulic motor to the electric drive. The drive system of suction dredger with motor as driving mechanism has the advantages of high working efficiency, convenient control, high precision and less pollution to dredging environment. Compared with the traditional driving technology, motor drive is more suitable for the development of the times. The motor control problem caused by it is a key problem to be solved in electric drive at present. The research object of this paper is the cutter drive system of suction dredger, based on motor control. The speed control of winch motor is studied in this paper.
Based on the basic structure of the winch and the two-dimensional cutting theory, the force of the winch is analyzed. In order to study the speed control of the winch motor, the model of the winch drive system is established, the mathematical model of the winch motor is set up, and the speed control strategy of the winch motor is analyzed and studied. Based on the working characteristics of winch motor, the model of motor speed control system is established. The PID control theory and fuzzy control theory are studied, and the characteristics and application scope of classical PID control and fuzzy control are compared and analyzed.
The comparison and analysis results show that the fuzzy PID control has good speed regulation performance, and the whole system not only has the advantages of fast response, but also has the advantage of more stable system control under complex working conditions.
Key words: suction dredger; cutter modeling; motor speed control; fuzzy PID control
第1章 引言
- 研究背景及意义
1.1.1 课题的研究背景
我国面积辽阔,依赖于数量众多的河流、湖泊、港口的天然优势,我国航运业运输量在世界居于前列。然而,目前许多河流和港口的淤塞问题阻碍着航道运输能力的增长,泥沙淤积带来航道运力大幅下降的严重问题,困扰着航运业的发展。随着近年来航运需求的增长,船舶排水量不断增加,因此对港口水深和航道的通航能力要求不断提高。为了提升航道运力,克服河流和港口的泥沙淤积问题,我国需要生产建造大量的疏浚设备,用以航道疏浚和河流清淤施工。因为国内疏浚作业需求量大且工作环境恶劣,对挖泥船的清淤效率和稳定性提出了更高的要求[1]。
绞吸式挖泥船作为一种综合性能优良的疏浚施工机械,主要用于航道和港口淤积疏浚工程、吹填造陆工程[1]。为满足在各种工况下的作业需求,船上装备的施工设备数量多、用途广。疏浚作业首先需要对土层进行切削,绞刀是切削过程中直接输出部件,属于挖泥船的核心设备。挖泥船经常会在有硬质土层的水域中进行疏浚作业,因此绞刀不仅需要稳定的输出功率,而且必须实现精确控制,在作业过程中必须要有功率大、易于控制的驱动设备来对绞刀进行驱动。传统的绞吸式挖泥船采用液压马达作为动力设备来驱动绞刀运转,液压驱动方式由柴油机驱动液压油泵,动力逐层传递到绞刀,在传输过程中能量转化次数比较多,因此造成了驱动功率不足的严重问题。随着新技术的不断问世,绞吸式挖泥船设计与建造的主流逐渐向着高效率、小型化的全电力驱动方向靠拢。采用电力驱动绞刀方式,由绞刀电机直接驱动绞刀运转,能量转换效率高,驱动效果显著,驱动控制方便[2]。
但是,选取电机驱动作为绞吸式挖泥船绞刀驱动方式,带来了便利的同时也带来了较多的技术难题。特别是在电机驱动绞刀工作时,由于绞吸式挖泥船施工水域的频繁变化,导致了绞吸式挖泥船的工作条件经常发生变化,为保证挖泥船在各种工况下可以稳定进行疏浚作业,绞刀电机驱动系统需要具备易于控制、性能稳定的特点[3]。绞吸式挖泥船的结构见图如图 1-1 所示。
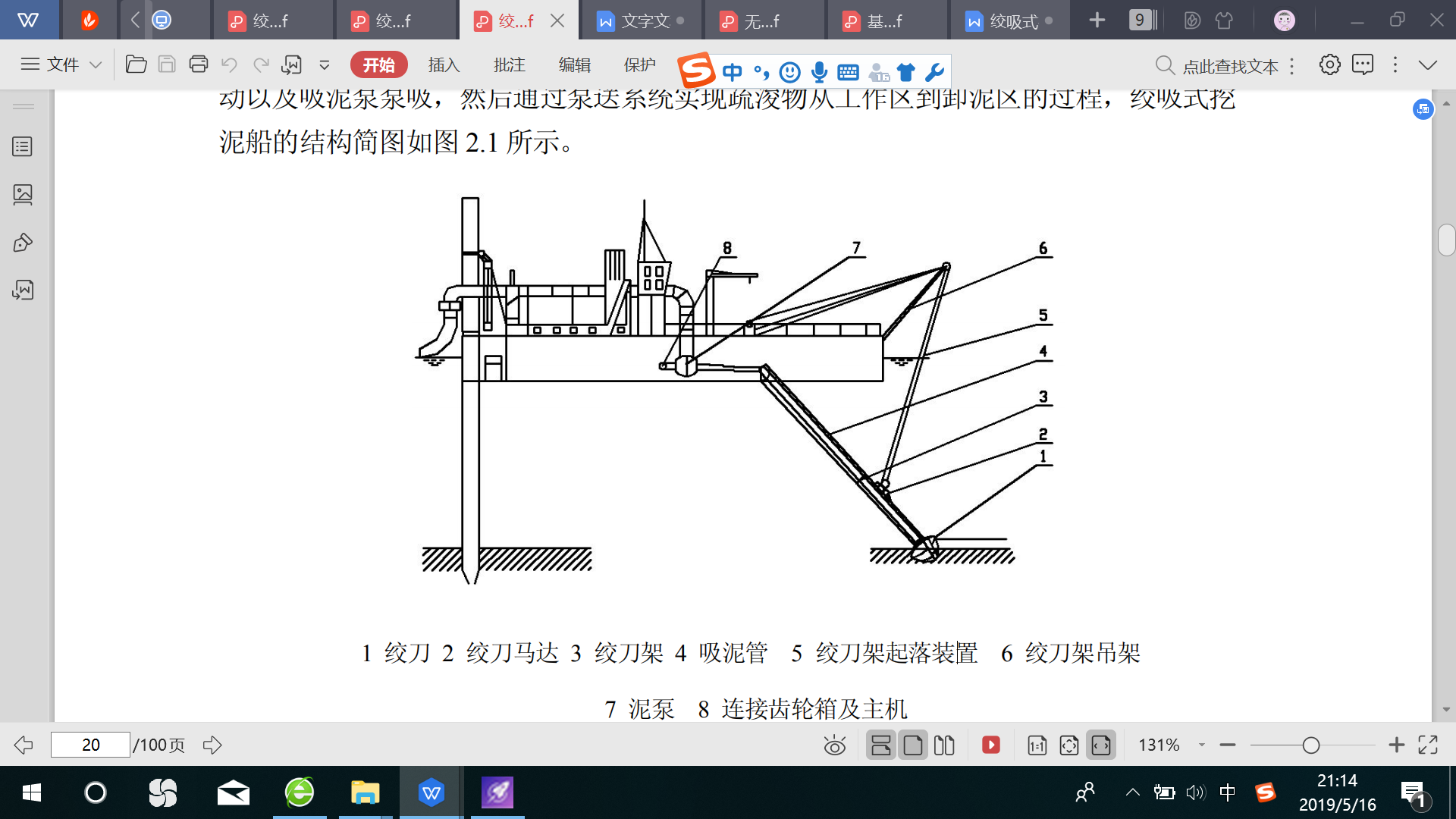
1绞刀 2绞刀马达 3绞刀架 4吸泥管 5绞刀架起落装置
6绞刀架吊架 7泥泵 8连接齿轮箱及主机
图1-1 绞吸式挖泥船结构简图
1.1.2 课题意义
绞刀作为挖泥船核心的施工设备,绞刀的结构和性能对切削效率有着直接的影响,切削角度的选取对疏浚效率有重大决定性作用。传统的绞吸式挖泥船的绞刀驱动方式在实际使用过程中面临着功率不足、效率低下的问题。因此传统驱动方式被逐步淘汰,绞刀驱动方式逐步向电机驱动方向发展。采用电机驱动技术大幅提高了传动效率,为保证挖泥船顺利进行施工作业、提高疏浚效率,因此对绞刀电机的控制研究显得尤为重要。
本课题主要研究挖泥船绞刀电机转速控制问题,根据绞刀的结构特点和工作原理,对绞刀进行受力分析,然后通过对绞刀电机工作特性的分析,基于模糊控制理论设计绞刀电机转速模糊PID控制器,实现对绞刀电机转速的精确控制。
1.2 国内外研究现状
1.2.1 绞吸式挖泥船国内外发展水平
(1)国外挖泥船研究及发展现状
当前,先进的挖泥船设计建造技术掌握在少数具备雄厚实力基础的制造场家,如荷兰IHC、达门公司、德国克虏伯公司、美国Elhcott公司等,这些厂家主要集中分布在发达国家地区,如欧洲、美国、荷兰、日本等地,这些厂家在挖泥船生产制造领域有着悠久的历史和丰富的经验,处于挖泥船技术领域的前沿,引领着挖泥船的发展方向,对挖泥船的发展有重要的影响。
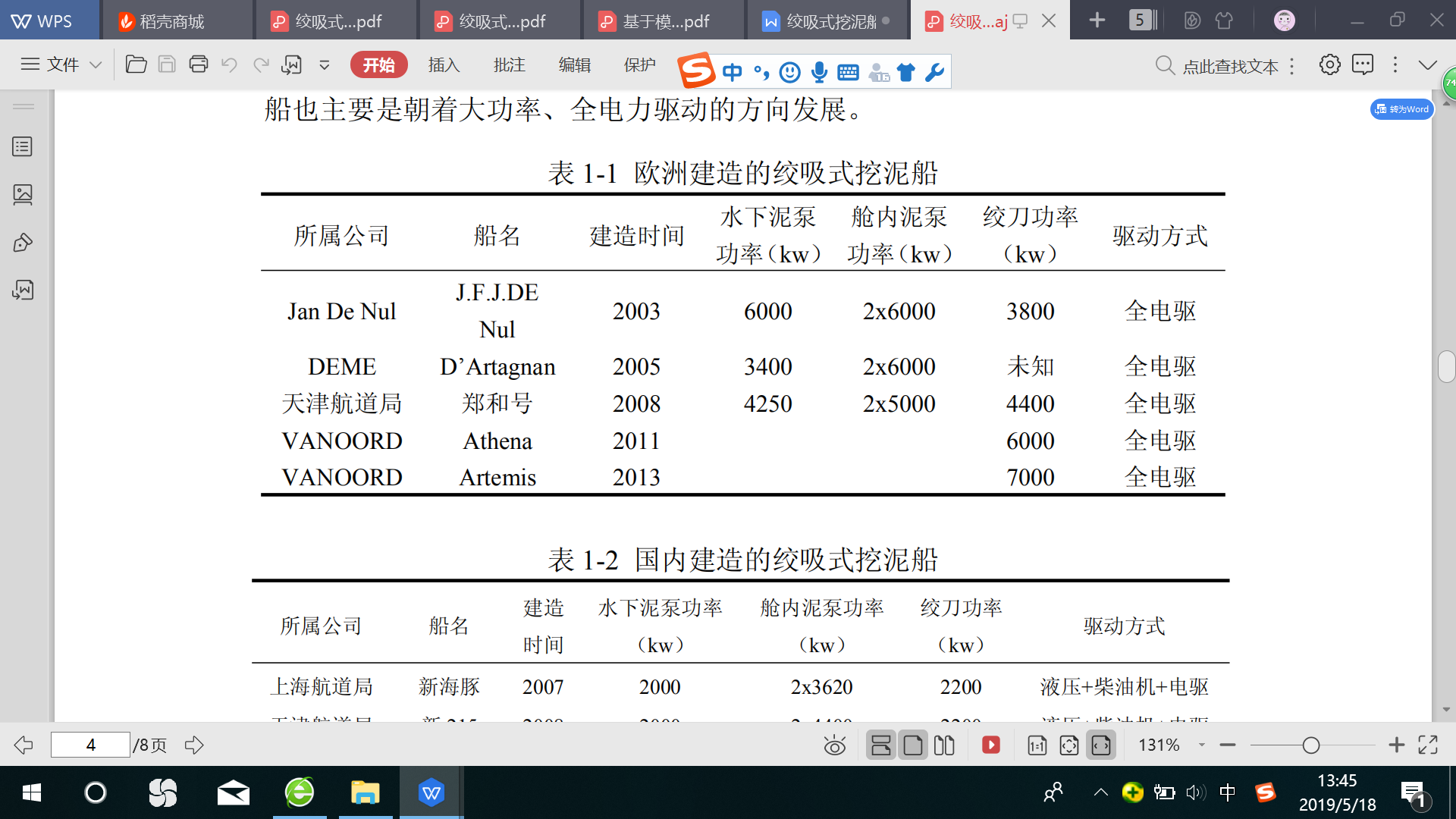
在挖泥船的生产和制造方面有着最悠久历史的国家是荷兰,1435年,第一艘水耙挖泥船在荷兰建造成功。17世纪初期,世界上最原始的绞吸式挖泥船诞生,尽管技术不够完善,但能够满足当时水下施工的需要。由于当时科学发展缓慢,工业发展水平低,挖泥船的初期发展相对缓慢,缺少新技术的支持。随着二战的结束,世界各国开始致力于经济与科技的发展,世界经济的建设逐步改善,工业也因此获得了长足的发展,新技术的应用促进挖泥船快速发展。现代化的绞吸式挖泥船最早问世于美国,1884年,绞吸式挖泥船开始在美国投入施工使用,顺利完成港口疏浚作业,这标志着绞吸式挖泥船的正式诞生。1893年,Bucyrus Steam疏浚公司成功建造了装有旋转绞刀的“RAM”号绞吸式挖泥船,这种挖泥船被成功地投入了疏浚工程,此后,自航绞吸式挖泥船获得了广阔的发展空间。自1977年第一艘自航绞吸式挖泥船的诞生以来,1986年比利时研制成功了“LeonardodaVinei”号,该船的研制成功标志着计算机控制技术应用于自航绞吸式挖泥船上,该船的自动化控制系统为世界首创;1990年左右,“Mashhour”号在荷兰IHC公司成功建造,该船不仅在功率上实现了重大突破,而且在性能上有了质的飞跃;之后,种类齐全的大型绞吸式挖泥船如潮水般涌现,促进挖泥船技术不断革新。同时,随着科学技术在工业领域实际应用的不断深化,计算机科学促进工程机械的不断革新,各种类型的智能自动控制技术日趋成熟,技术的发展也促使挖泥船未来的发展向着大型、高效、环保、智能的方向发展[4-6],绞吸式式挖泥船在国外建造情况如表 1-1 所示。
(2)国内挖泥船研究及发展现状
国内挖泥船研究起步相比于欧美国家较晚,技术积累薄弱,多项技术存在短板。21世纪初期,我国挖泥船市场需求量大但国内技术无法满足市场需求,国内挖泥船长期依赖于进口,情况不容乐观。直到2005-06年,我国终于打破了国外的技术垄断,我国独立研发和设计建造大型绞吸式挖泥船“航绞2001”号和“新海鳄”号的成功,标志着我国在该领域取得零的突破[7]。由于我国工业基础薄弱,为填补我国在挖泥船设计制造领域的空白,我国确立了以引进、消化和吸收国外先进技术为基础的发展模式,以国外先进技术作为参考,不断进行学习和创新,逐步缩小与世界先进发展水平的差距。近年来,我国基于“引进、消化、吸收、再创新”的发展模式,以高科技平台与低成本扩张相结合的方式努力在绞吸式挖泥船领域追赶[8]。在2001年后的三年时间里,我国在挖泥船设计生产领域积极创新,率先掀起了“货改耙”的研究开发思路浪潮,先后完成了三艘13000大型耙吸船的关键部位改装与设计工作。2005年,我国研发设计团队致力钻研,自主设计建造了“航绞2001”号,该船对于我国挖泥船的研究发展意义重大,我国的设计和建造水平通过该船的设计建造过程获得了巨大提升。时隔仅仅一年,我国在大型挖泥船设计建造领域实现了历史性跨越,国内首艘3500 “新海鳄”建造完工,标志着我国一举迈入了具备大型先进挖泥船建造能力的全新高度。我国现有的绞吸式挖泥船种类齐全、功能多变、用途各异,已经涵盖2000-4500不同排量,并朝着智能化和大型化的方向稳步迈进,控制技术的进步使得挖泥船可以在各种复杂工况下稳定运行[9]。2008年建成的16888大型自航耙吸式挖泥船“新海风”是我国当时内舱容最大的挖泥船,标志着我国挖泥船大型化顺利迈出重要的一步。2009年,我国在挖泥船大功率化取得突破,“天鲸”号自航绞吸船开始投入施工,功率高达19800kW,是中国当时装机功率最大的自航绞吸船。2010年,由中国和荷兰共同联合设计的4200kW绞刀功率的“新天鲸号”建造完成并交付使用。该船不仅在工程机械设备配置上均处于世界前沿水平,而且在体积和功率上在国内外首屈一指。伴随着自动控制技术的完善,人机交互系统被更多的应用于挖泥船上,我国在该领域取得重大进展,新天鲸号的研究与开发也标志着我国在挖泥船的自主创新上实现了关键性突破[10]。
近10年来,我国在挖泥船研究领域取得多项进展,填补了多项技术空白,逐渐缩小了与国外技术的差距,通过努力我国具备了各型绞吸式挖泥船自主设计建造能力。然而,在挖泥船研发设计方面,我国与世界先进技术之间仍存在一定差距。目前,我国在该领域的综合实力距离国外先进水平仍有很长的路需要走,基础技术比较落后且不够完善,高端技术虽有部分突破,但存在严重短板,专业人才短缺[11]。
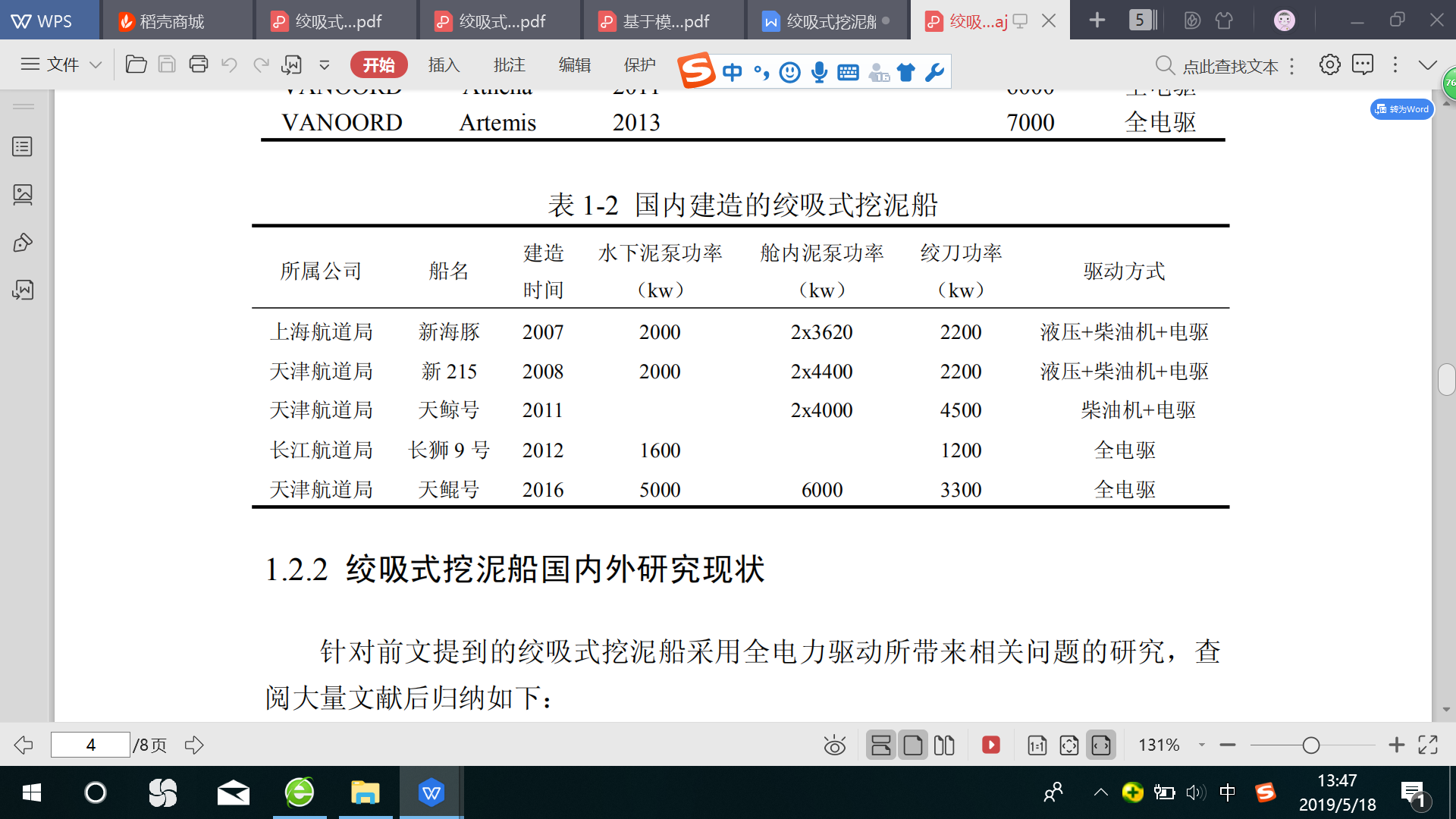
尽管我国在挖泥船研究领域奋力追赶,与发达国家相比仍然有三十年左右的差距。后来随着国内航运业的发展,对于港口航道的扩建需求日趋迫切,随着江河航道疏浚治理和港口的大量建设,国内疏浚市场大幅增涨,国内市场对大中型绞吸式挖泥船的需求量大大增加,挖泥船市场呈现出欣欣向荣的景象。为了弥补我国在绞吸式挖泥船设计制造领域的不足,在20世纪末期我国政府实施了百船工程项目,引进了国外先进的挖泥船船设计制造技术,并生产了100多艘专门疏浚船舶,重点用于清除河流中下游的泥沙淤积和水源沉积物[12]。随后,国内设计团队攻克一系列难题,在多个关键领域取得重大进展,自主研发设计建造的绞吸式挖泥船正逐步缩小与世界先进水平的差距,由表 1-2 所示国内建造的绞吸式挖泥船可以得出结论,我国大型绞吸式挖泥船的设计和建造也主要朝着大功率全电驱动的方向发展。
(3)挖泥船总体发展趋势
目前,各种新技术应用到挖泥船上,一种新型的智能自动控制系统投入到挖泥船的自动控制当中,用于实现疏浚过程中各种功能的自动化操作要求。随着计算机技术的成熟,多种智能控制策略投入应用,挖泥船作业正逐步向高效、智能、经济的方向发展。
随着航运业务的不断拓展,要求航道和港口具备更大的通航能力,所以航道畅通对疏浚施工提出了更高的要求,疏浚作业难度将大大增加,恶劣的工作环境对挖泥船的性能提出了更大挑战,这需要绞吸式挖泥船具备更加优良的性能。随着世界各国对挖泥船需求量的不断增加,如何提高挖泥船作业的效率和稳定性是今后挖泥船研究的主要方向[9]。
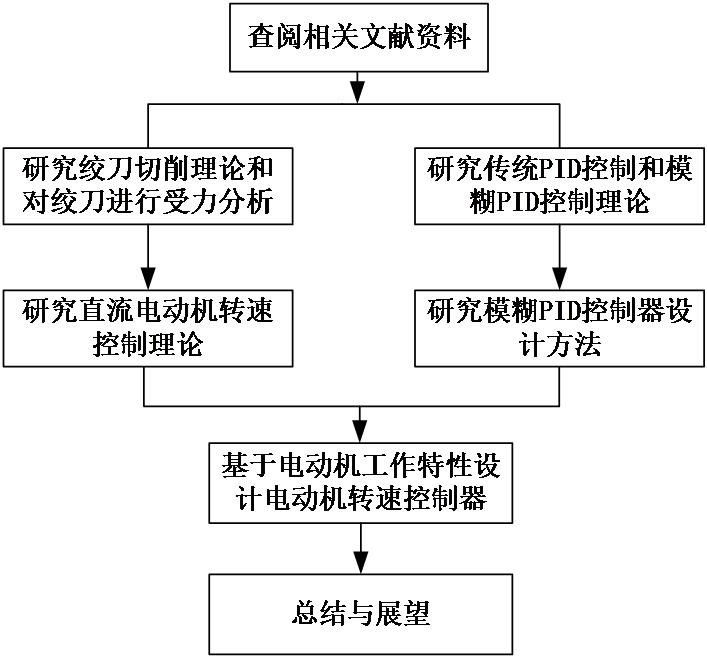
1.3 课题技术路线
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: