自主水下航行器控制系统设计毕业论文
2020-02-19 09:08:46
摘 要
随着计算机技术、人工智能技术、导航定位技术、控制软件技术的发展,自主水下航行器(AUV)的技术水平也随之越来越高。目前在军事与民用领域自主水下航行器都拥有着很广阔的市场前景,各国专家学者都着力于新型AUV的研发,自主水下航行器的地位不容忽视。
控制系统作为自主水下航行器的核心,高效、稳定的控制才能维持自主水下航行器的正常工作。如今的AUV控制系统广泛使用分布式结构,而控制算法的选择却各有不同,既可以单独使用一种控制算法,也可以依据各自算法的优点结合起来设计一套控制系统。
本文第一章介绍了水下航行器和水面航行器的差异,水下航行器的分类,自主水下航行器的功能与特性,并总结了常见的控制算法。第二章讨论了航行器控制的结构层次,构建系统的整体架构、通信网络,并对控制系统的每个功能模块进行说明和选型。第三章对自主水下航行器的运动规律及受力情况进行分析,得到一般的六自由度空间运动方程组,然后通过解耦和适当的简化推导其水平面和纵向垂直面的运动方程组,并代入相关参数获得深度和航向控制的传递函数,从而建立其数学模型。第四章对PID控制的参数整定进行描述,采用PID控制器,在MATLAB的环境下针对AUV的航向控制和深度控制分别设计有效的控制原理框图,通过输入阶跃信号和周期信号来模拟自主水下航行器受到小扰动和持续扰动的情况,根据示波曲线来分析其控制效果,验证所设计系统的可靠性。最后对全部工作进行总结,并对自主水下航行器的研究趋势谈谈展望。
关键词:自主水下航行器;控制算法;六自由度;运动控制;PID控制;参数整定
Abstract
With the development of computer technology, artificial intelligence technology, navigation and positioning technology, and control software technology, the technical level of autonomous underwater vehicles (AUV) has also become higher and higher. At present, the autonomous underwater vehicles in the military and civilian fields have a very broad market prospect. Experts and scholars from all over the world are focusing on the research and development of new AUVs, and the status of autonomous underwater vehicles can’t be ignored.
As the core of the autonomous underwater vehicle, the control system can maintain the normal operation of the autonomous underwater vehicle with efficient and stable control. Nowadays AUV control systems use distributed structures extensively, but the choice of control algorithms varies, design a control system either by using a single control algorithm or by combining the advantages of their respective algorithms.
The first chapter of this paper introduces the differences between underwater vehicles and surface vehicles, the classification of underwater vehicles, the functions and characteristics of autonomous underwater vehicles, and summarizes common control algorithms. The second chapter discusses the structure levels of the vehicle’s control, builds the overall architecture of the system, communication network, and describes and selects each functional module of the control system. In the third chapter, the motion laws and force of the autonomous underwater vehicle are analyzed and the general six-degree-of-freedom space motion equations are obtained. Then the equations of motion of the horizontal plane and the vertical plane are deduced by decoupling and appropriate simplification. And pass the relevant parameters to obtain the transfer function of depth and heading control, thus its mathematical models are established. The fourth chapter describes the parameter tuning of PID control. Using PID controller, for the heading control and depth control of AUV, effective control principle block diagrams are designed respectively in the MATLAB. The step signals and periodic signals are input to simulate the small disturbance and continuous disturbance of the autonomous underwater vehicle. According to the oscillometric curve, the control effect is analyzed to verify the reliability of the designed system. Finally, the whole work is summarized, and the research trend of autonomous underwater vehicles is discussed.
Keywords: autonomous underwater vehicle;control algorithm;six degrees of freedom;motion control;PID control;parameter tuning
目 录
第1章 绪论 1
1.1 课题研究背景及意义 1
1.2 国内外AUV的发展现状 3
1.3 自主水下航行器控制系统 5
1.4 论文主要工作 10
第2章 自主水下航行器控制系统整体结构设计 11
2.1 控制系统结构层次 11
2.2 控制系统整体架构 11
2.3 通信网络平台 13
2.4 软件系统 14
2.5 推进系统设计 15
2.6 电源控制设计 16
2.7 控制系统各功能的实现 17
第3章 自主水下航行器的运动学与动力学模型 21
3.1 坐标系的建立 21
3.2 定义变量 21
3.3 水下航行器的受力分析 22
3.4 水下航行器的空间运动方程组 23
第4章 PID控制器及其仿真 27
4.1 PID控制及参数整定 27
4.2 运动控制器设计 28
4.2.1 偏航角ψ的PID控制器设计 28
4.2.2 深度n的PID控制器设计 33
第5章 总结与展望 39
参考文献 40
附录A 41
致 谢 44
第1章 绪论
1.1 课题研究背景及意义
一个国家的经济发展离不开海洋,纵观当今世界几大强国,在海洋事业上都耗费了大量的财力、人力,兴建船舶,发展航运,勘探海底,寻找资源。国际上的许多争端都与海洋有不可分割的联系,海洋面积有3.6亿平方公里,其蕴含着大量的海底资源,例如:石油、煤、油气以及各种矿物质原料,而且海洋是生态系统中很重要的一个部分,海洋的资源究竟有多丰富根本不为人所知,只有通过不断发展高新技术,才能探索更深的位置。可持续发展的实践更是不能离开海洋这个对象,海洋是全人类的宝贵财富,其重要性不言而喻。
人们为了深入认识海洋、开发海洋,研发了各种高新技术,水下航行器便是其中之一。水下航行器和水面航行器是有很多不同点的,主要包括以下几个方面:(1)水下航行器大部分时间都是在水下执行任务,与水面工作站的通讯只能通过水声通讯,而水面航行器通讯设备有很多种,无线电通讯设备、GMDSS等等。(2)为了能进入水下工作,除了和水面航行器相似的自由度控制外,水下航行器还要具备自行下沉和上浮的能力,控制更为复杂,一旦在水下出现故障,回收的难度也会很大,对水下航行器的抗沉性、浮性等性能要求更苛刻。(3)水面船舶可以通过雷达、磁罗经、电罗经进行导航定位,水下航行器主要还是应用惯性导航系统,精度高,自动化程度高,最关键的是惯性导航系统工作独立,依靠自身的惯性元件导航,不需要依靠外界的参照物,不易受到干扰和破坏,特别适用于水下环境。(4)水下航行器所处的工作环境恶劣,水下光线不足,压强也更大,对其材料和自主性都提出了很高的要求。
水下无人航行器(UUV)无论在军事上、还是民用方面都已不是新事物,其研制始于50年代,最初的民用研发目的主要是为了开发海里的石油和天然气等天然能源,而军队起初是把水下航行器当做一种辅助工具,国家在对海底武器进行试验后,都要对其回收,利用无人水下航行器去打捞更加安全可靠,等到了后来水雷战的兴起,水下航行器更是作为灭雷具在战场上派上了很大的用场,发展得也越来越好,性能也在逐步改良。
水下航行器通过电缆来控制其活动的称之为缆控水下航行器(Remotely Operated Vehicles,简称 ROV),而对应的没有电缆连接的就称为自主水下航行器(Autonomous Underwater Vehicles, 简称 AUV)。因为ROV需要电缆,但是电缆长度是有限的导致ROV的活动范围小,而且水下环境复杂,电缆反而使航行器的灵活性降低不少,有些任务甚至难以执行,如图1.1所示。相反,AUV则完全不需要依靠电缆,在水下作战和作业方面(例如海底搜索、调查、识别和打捞)灵活许多,正是这方面的优势使得AUV的发展日益受到各国军事海洋技术部门以及科学研究所的重视[1]。
要想控制自主水下航行器,一定清楚它的运动状态、定位以及确认航行器的内部状态参数是否正常,为了获取需要的信号往往在水下航行器上安装了各类传感器,信号传送到机载中央处理器中进行统筹处理,并作出决策,驱动各种机构独立完成操作任务,例如水下探测,信息搜集,水中的机动操作,动力定位等。水下航行器长期处于深水区工作,岸上工作站和水下航行器的通讯比较困难,在岸上常用的无线电波等通讯方式此处都不适用,通常这种水下航行器都只能依靠水声通讯技术与岸上工作站、水面工作站进行联络,若航行器上面安装了无线电天线,那么当水下航行器浮出水面或处于近水面时,可以通过无线电与岸上工作站和卫星系统来进行通讯。在能源供应上,AUV 完全依靠自身供给,自身一般都携带充电电池、闭式柴油机、燃料电池等[1]。
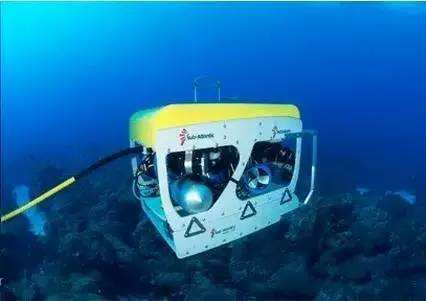
图1.1 缆控水下航行器
自主水下航行器其实重点就突出在自主上,它本身就是一个任务控制器,内部的计算技术是控制的关键,随着计算技术、人工智能的发展,AUV的技术水平也更高,同时AUV的研发还需要融合各方面的高新技术,例如:计算机控制软件、传感器、深潜器、推进技术、环境效应、材料性能、制造水平等。AUV通常具有以下几个特点:1)自治能力强;2)活动空间大;3)智能化水平高;4)适应能力强;5)实用性好;6)隐蔽性好。但目前还不能执行复杂的任务,自主水下航行器的运动具有非线性和耦合动力学的特征,使有效数据的获取造成了困难,识别水下航行器结构的动态参数是相当具有挑战性的,智能化的发展将是未来发展的关键。
在军事领域,AUV可以用于水雷战、反潜战,还能起到侦察和提供后勤支援的作用,在民用领域,海底环境复杂,AUV能帮助人们更好地勘测海底环境,甚至是可以预测地震。另外,海底蕴含着大量的自然资源,AUV的日渐成熟让海洋开发成为可能,如:水下采矿、海底石油和天然气的开发等。AUV的市场需求是很大的,未来一定会有很大的发展潜力,除了军队的战略需要,也能将AUV变成人民生活的一个部分,形成商业化产业链,加大生产,但我国在AUV的方面与国外的先进技术相比还有一定的差距,因此对我国而言新型AUV的研究是极具战略意义的,也是刻不容缓的。
自主水下航行器的自主性是通过控制系统性能的好坏来反映的,因此,自主水下航行器控制系统的设计具有一定的理论研究意义和实际工程应用价值,我们需要充分了解AUV控制系统的功能、特性及组成,设计控制系统的软、硬件系统,并对设计的AUV进行受力分析,选用合适可靠的控制算法,通过控制软件对其进行建模仿真,验证其可靠性,为今后的研究提供一定的指导。
1.2 国内外AUV的发展现状
AUV时代真正意义上的开始一般都认为源于20世纪60年代华盛顿大学和SEA SPOOK的 SPURV的研制成功[2]。等到了80年代末,计算机技术、人工智能技术、专门用于水下的导航设备、微电子技术、控制软件技术的发展都达到了全新的高度,而这些技术正是研发自主式水下航行体(AUV)不可或缺的,更推动了AUV的发展[1]。在20世纪90年代,AUV技术慢慢地完善,成为一种可操作系统,人们通过下达指令让其完成相关的任务[2]。目前美国、日本、意大利、俄罗斯、英国、加拿大等发达国家在自主水下航行器的研究领域皆处于领先地位。美国有许多的高校都积极得研制AUV,例如:MIT Sea Grant’s AUV 实验室、佛罗里达大西洋大学高级海洋系统实验室、海军研究生院智能水下运载研究中心[3]。美国研制了大量的自主水下航行器,主要用于海洋研究和科学考察,如OceanExplorerII(佛罗里达州大西洋大学)、ABE(WHOI)等。日本在自主水下航行器的研究领域也有不少的先进成果,用于海洋调查的有R1Robot(如图1.2所示)、URASHIMA等,俄罗斯、加拿大等各国也开展了大量的工作。目前自主水下航行器已经从开始的研发阶段,逐渐开始朝着商业化的发展。自主水下航行器的市场需求根据以往的调查是相当巨大的,除了军方,还有学术界和近海工程[4]。

图1.2 日本R-1 Robot
我国的自主水下航行器同样也是最早起步于军事领域,经过几十年的科研投入,目前我国的自主水下航行器的自主研发水平已经较为先进,中科院沈阳自动化研究所在国内自主水下航行器的领域贡献是巨大的,它们研发的“CR-01”、“CR-02”技术水平很高,尤其是“CR-02”这种AUV,如图1.3所示,按照设计的要求理论上可以达到6000m的水深。同时,其研究所还研制了更专业化的AUV,主要用于海洋科学研究的“探索”系列AUV和用于深海资源勘查的“潜龙”系列AUV,这两个系列的AUV都采用的非回转体立扁鱼形设计,如图1.4所示,这样的设计能充分减小垂直面阻力,提高了航行器的垂直爬升能力,也可增强其水面航行能力。此外,中船重工研究所还有一些参与军工的高校例如哈尔滨工程大学、海军工程大学等等都有大力投入,努力研发出高度集成化、智能化的自主水下航行器,但我国研发出来的自主水下航行器与美国、英国、日本等发达国家制造的AUV相比还是落后不少,建国以前我国对科技不够重视,因此,无论是导航定位系统、工艺水平、通讯系统、检测技术等都比同期其他发达国家的科技水平低很多,未来我国还需要加大投入,发展更先进的技术,和水下航行器有机地结合到一起,逐步缩小与发达国家之间的差距[3]。
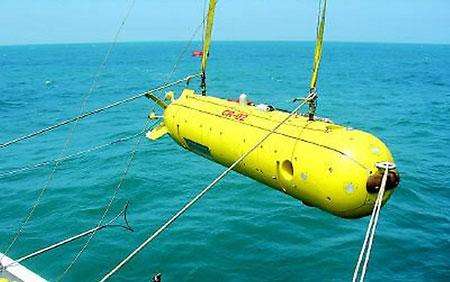
图1.3 CR-02

图1.4 探索4500
深海AUV的研发是多个学科交叉融合的结果,涉及到人工智能、计算机、自动化、材料等多个方面,为了使自主水下航行器的专业化、智能化水平更高,需要努力攻克这些关键技术,包括总体设计技术、集群协同技术、导航技术、水下通信技术、能源及动力推进技术、自主探测与识别技术和布放与回收技术等[5]。总体而言,各国都在研发更智能、续航能力更持久、深海级别更高的AUV,集成电路技术的发展也使得水下航行器正从单体多功能向单体专业化、模块化发展,从信息型AUV向自主作业型AUV发展。
1.3 自主水下航行器控制系统
作为自主水下航行器的核心,控制系统的设计非常关键,现在有关运动控制的理论知识已经相当丰富,采取什么样的控制算法,如何搭建合适的控制系统,既能满足全部的功能,但是设备又不会显得太过赘余。Thor I. Fossen详细讨论了许多控制系统:用于前进速度的控制系统,用于航向保持和潜水的自动驾驶仪,转向控制器,航迹保持系统,动态定位系统等[6]。石贤良、吴成富为了提高控制系统的可靠性,设计了一种双冗余飞行控制计算机系统,能迅速完成多项任务,这种冗余系统能有效地提高任务可靠性和安全可靠性,并具有良好的实时性和实用性的特点[7]。
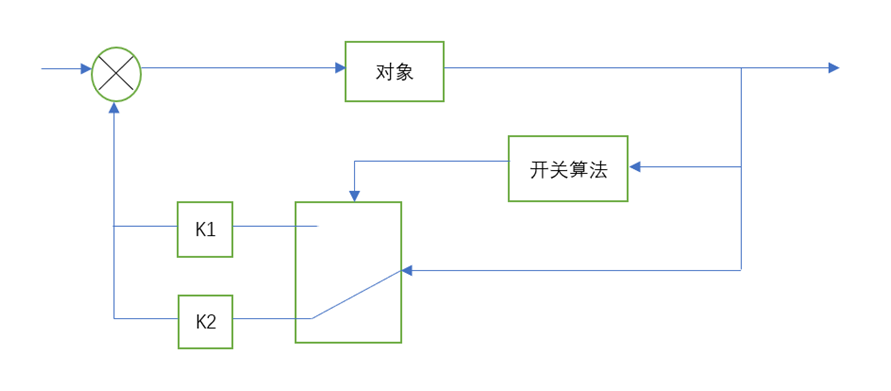
早期控制系统的整体结构布置都采取集中式,但是这种控制容易相互干扰,处理速度也很慢,逐步被分布式系统取代,分布式现在应用得越来越多,高剑,严卫生,张福斌等提出一种新的基于CAN总线的自主水下航行器(AUV)分布式控制系统,通过中央处理系统发送过来的指令,只对传感器和推进机构形成模块化的独立控制,并将非实时的任务管理与实时的航行控制分离,这种分布式控制系统,不仅让整个系统更加直观,也将运行效率大大的提高[8]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: