人工智能技术在变电站噪声监控与测试中的运用毕业论文
2020-02-19 09:16:31
摘 要
近些年我国的变电站噪声监测一直在开展,主要还在大范围内的延用以人工监测为主、高科技监测为辅的形式展开。本文从理论和实际两方面出发,基于Muiti-Agent system (MAS)设计了一种通用性较强、性价比较高并且易于操作的变电站噪声监测系统的方案,并对其数据采集终端要搭载的具体系统提出了构想。
本文整体框架为总分结构,在对MAS和Agent的基本系统结构研究和调查之后。讨论并基本确立了基于MAS的变电站噪声系统的整体模型,明确了各个子Agent的任务;接着分别对判断Agent,数据收集Agent,管控Agent的系统模型提出了构想;最后,结合变电站声学测试技术提出数据收集Agent的终端的监测方案——将每个机器人收集到的声学数据处理之后,将计算得出的声场叠加到变电站实景三维模型中,以全局显示变电站声场分布并存到数据库中。其中,智能机器人的导航方式选择的是精度更高的磁导航方式;三维场景模型用的是受变电站环境干扰最小的激光雷达扫描方式;声学数据由搭载四元平面传声器阵型结构的智能机器人采集,该种阵型结构还可对噪声源进行定位。
关键词:变电站;MAS;智能机器人;噪声测试
Abstract
In recent years, China's substation noise monitoring has been carried out, mainly in the form of extended use of manual monitoring and high-tech monitoring. Based on the theoretical and practical aspects, this paper designs a scheme of substation noise monitoring system with strong versatility, high cost performance and easy operation based on Muiti-Agent system(MAS), and proposes a concrete system for the data acquisition terminal.
The overall framework of this paper is the general structure, after the research and investigation of the basic system structure of MAS and Agent. The overall model of MAS-based substation noise system is discussed and basically established, and the tasks of each sub-agent are clarified. Then, the system model of judgment agent, data collection agent and management agent is proposed. Finally, combined with substation acoustic testing technology The monitoring program of the terminal of the data collection agent - after processing the acoustic data collected by each robot, superimposing the calculated sound field into the real-time three-dimensional model of the substation to globally display the sound field distribution of the substation and store it in the database. Among them, the navigation mode of the intelligent robot selects the magnetic navigation method with higher precision; the three-dimensional scene model uses the laser radar scanning mode with minimal interference from the substation environment; the acoustic data is collected by the intelligent robot equipped with the quaternary planar microphone array structure. This array structure also locates the noise source.
Key Words:Substation; MAS; Robot; Noise testing
目录
摘要 I
Abstract II
第 1 章 绪论 1
1.2 变电站噪声监测国内外研究现状 1
1.2.1 国内现状 1
1.2.2 国外现状 2
1.3 研究的目的和意义 2
1.4 本章小结 3
第 2 章 Agent及Muiti-Agent system (MAS)概述 4
2.1 Agent基本概念 4
2.1.1 Agent定义和特性 5
2.1.2 Agent系统的基本结构 6
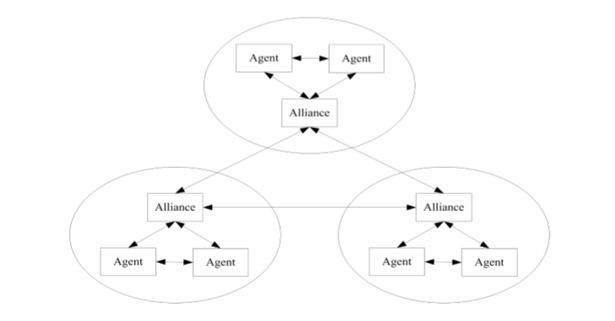
2.2 MAS基本概念 9
2.2.1 MAS系统结构 9
2.2.2 MAS系统的优点 12
2.3 MAS之间的通信 12
2.3.1 无通信模式 12
2.3.2 消息模式 13
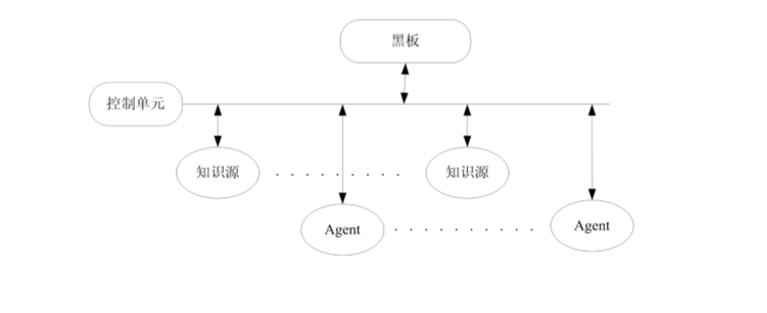
2.3.3 黑板模式 13
2.3.4 方案传递模式 14
2.3.5 Agent通信语言模式 14
2.3.6 Agent通信协议 14
2.4 MAS之间的协商,合作与协调 14
2.5 本章小结 15
第 3 章 基于MAS的变电站噪声监测系统 16
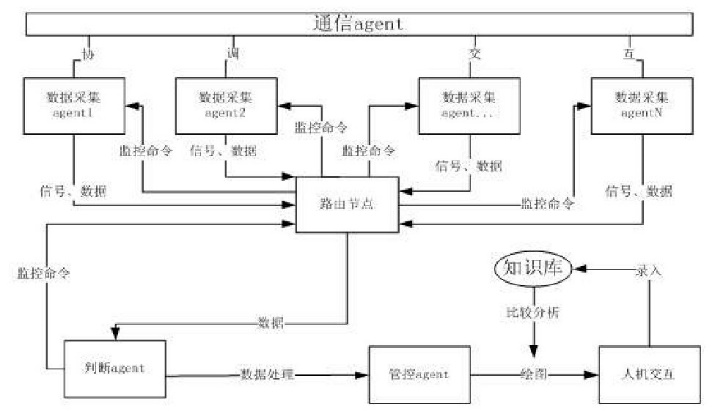
3.1 基于MAS的变电站监测系统模型 16
3.2 变电站噪声监测系统Agent设计 17
3.2.1 判断Agent设计 17
3.2.2 数据收集Agent设计 18
3.2.3 管控Agent设计 19
3.2.4 Agent之间的通信模式 19
3.3 本章小结 20
第4章 移动Agent在变电站监测中的应用 21
4.1 移动Agent定位 21
4.1.1 移动Agent定位方式 21
4.1.2 移动Agent定位方式的选择 22
4.2 基于移动Agent的变电站三维模型的构建 22
4.2.1 变电站三维场景模型的意义 22
4.2.2 变电站三维模型创建方法 23
4.4 移动Agent噪声源定位 24
4.4 基于移动Agent的变电站噪声监测方案 27
4.5 本章小结 28
第 5 章 展望 29
参考文献 30
致谢 32
第 1 章 绪论
1.1 研究背景
伴着我国经济的快速发展和居民对生活要求的提高,用电方面需求显著增长,城镇、城市用电负荷密度也相应增大。以前变电站远离居民生活区也能满足其用电需求,但目前为满足居民高密度的用电负荷要求,变电站宜靠近居民用电负荷中心。在社会和经济效益日益提升的情况下,变电站安全问题逐步显现出来,2003至2015年间,加拿大,美国和土耳其等国家先后爆发了多起大停电事件,涉事国家由此遭受的损失是相当惨重的[1]。虽然这些失误看上去很不起眼,但如果后续操作不及时或不得当,可能继而引发“蝴蝶效应”,当变电站设备出现异常时,一般都会产生剧烈振动,振动必然产生噪声,所以对变电站噪声的监测对变电站的安全上来讲起着重要作用。
而且噪声对人的危害很大,长期处在噪音影响下的人们往往会出现听力损伤、失眠等。现在,环境保护已经成为了全球的战略共识,而且噪声又是当今世界的第三大公害,噪声污染必须得到治理,变电站的噪声必须得到控制。
1.2 变电站噪声监测国内外研究现状
1.2.1 国内现状
上个世纪末开始,噪声实时显示屏在我国上海、北京等城市开始建设,公民的环保意识随着环境噪声自动监测的实施也都得到了提高。如今的自动环境噪声监测技术突飞猛进。国家通过出台多个标准、规范和规定为自动监测领域和环境自动监测工作提供了强有力的帮助。自动监测设备不仅能以动态扫描的方式显示被测区域噪声实时状况,而且通过联网将噪声信息传到数据库中或者与其他设备共享。但是由于变电站噪声自动监测的点位不好确定,加上天气因素等也会影响测量结果,这些都会导致我国环境噪声的监测水平不稳定。
研究人员将分布式人工智能技术结合到环境噪声监测系统,利用MAS对复杂系统问题强大的求解能力,建立出了基于MAS的环境噪声监测系统,构造BDI模型,拓展混合的Agent结构,将传统的不具备自治能力的噪声监测系统转变为低耦合高内聚同时拥有具有自我管制学习能力的MAS监测系统,使监测系统具备良好的可靠性、可扩展性和稳定性,完善了噪声监测决策库,监测管理水平得到了极大的提升,能够实时的监控噪声,就算工作人员暂时离开了工作岗位,监测点周边的噪声环境状况也能得到全面有效的了解和把握,就此将科学合理的决策制定出来,为噪声污染监测提供了有效方式[2]。此系统的运用,能够对噪声数据进行及时,精准的获取,对噪声来源进行锁定,系统更容易操作,准确度更高,更容易移动,与传统的噪声监测系统相比,有了极大幅度的提升。后续发展过程中,在人工智能和无线技术日益成熟的情况下,智能传感器也逐步升级至自主体传感器。
1.2.2 国外现状
国外的环境噪声监测仪器现在大部分都可以自动测量,数据处理和信息传输都可以无需人为操作,从而达到信息网络互联,监测信息共享,由于人工智能的发展,噪声监测信息的处理和评价都已经达到很高的水平[3]。欧洲是最早开展采用计算机声学仿真进行噪声治理的地区,声学仿真所形成的噪声地图,从全局的角度来查看声压的分布,并根据声压分布的特点有针对性的评估噪声传播的路径和有针对性的开展噪声治理工作,弥补了定点测量的不足。在技术,制度,理论等方面,欧洲国家都占据了绝对的优势,以声学仿真为支撑的噪声分布云图,在噪声管控、噪声环境规划和公共化的环境考评等方面都得到了广泛的运用。2000年,伯明翰率先绘制出了噪声地图,该地图在2004年得到了更新,并在噪声防治和降噪宣传领域得到了重点运用;葡萄牙的城市建设和治理活动中,噪声污染控制被当成一项重要的工作内容,在城市规划和管理活动中,噪声地图的功效得到了充分的发挥;意大利在噪声地图的支撑下,依托于GIS城市噪声管理系统,可以更好的组织和开展噪声防控及城市治理工作;挪威借助于噪声地图,参照人口统计资料来控制噪声;欧盟在2002年对欧洲环境噪声指引进行了公开发布,以此为推动,欧洲在研究噪声地图的时候,逐步迈向于“噪声考评指标和方式”相统一的方向,此外,欧盟负责环境工作的部门也开始了“HARMO-NOISE”和“IMAGINE”项目的研究与实施。与此同时,研究噪声地图的国家日益增多,成果相当显著。美国凭借噪声地图对公众进行吸引,对噪声控制意识进行培养和强化;韩国在噪声地图辅助下,综合考评环境影响;在绘制噪声地图的过程中,阿根廷学者对其中不确定性问题进行重点探究,尽可能的让噪声地图更加精密。日本等国也对噪声地图进行了绘制,在噪声防治和城市治理等工作中也对此进行了充分运用。
1.3 研究的目的和意义
在重大电力事故发生时,可以通过噪声异常及时检测出发生故障的位置并作出相应的补救措施避免事故的进一步蔓延,所以对变电站平时的噪声监测这一环节至关重要。根据美国安全管理工程局统计结果分析,作为统计案例的五十万机械事故中,百分之八十九事故都是因为人为操作失误,变电站也不例外。但是由于技术和成本的限制,变电站在检测噪声的时候,通常依赖于人工测试方式,然而此种方式存在明显的局限性。第一,人与人之间的感官差异使得测得的数据存在差别,可能会出现记录不全面或者漏检的现象;第二,变电站的高压环境和可能存在的复杂地势,再遇上恶劣的天气,在准确性和安全性方面,难以提供有效的保障;第三,常规监管期间,有问题暴露出来时,人工巡检方式下,领导的管理不够及时,直接,随着时间的推移,事态有可能恶化,由此产生的后果会变的更加严重。以上局限性无法彻底规避或消除。此种情况下,人工智能技术的运用,给变电站检查指明了出路,随着机器人技术的成熟,开发出能够代替人为检测的智能监测与测试系统成为大势所趋,变电站分布式人工智能监测也由此提出。
1.4 本章小结
本章重点介绍了研究背景,之后对国内外现有的变电站噪声监测情况进行了总体论述,最后根据人工监测变电站噪声的弊端,明确了本文的研究目的和意义。
第 2 章 Agent及Muiti-Agent system (MAS)概述
2.1 Agent基本概念
站在智能的角度上思考,Agent是一种代表所有具备智能不管是自然亦或是人工智能的实体的一个抽象名词,所以说,其能够描述许多内容,比如说人、机器人、智能的设备或软件等都可以。在其处于某环境下,能够通传感器以及作动器,去分别感知与作用于环境。参考下图2-1所示,其无法单独的置于环境中,这意味着其亟需许多个在相同的环境中相辅相成协同工作,也就是要起到相互通信的作用,使得工作时能够达到自治、主动的目标。
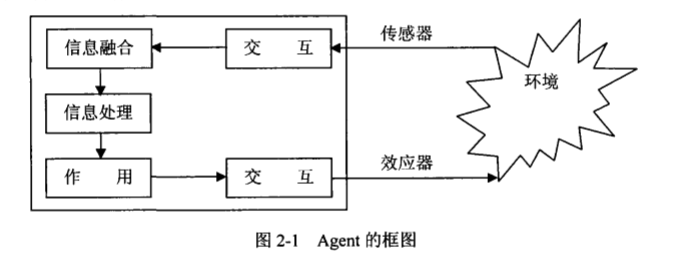
图2.1 Agent的框图
对于Agent而言,此技术的概念早在二十世纪初便正式提出了,分布式问题求解是探究这项技术的主要推动力。研究的重中之重聚焦在解决协同工作的问题,比如间的交互作用以及通信任务的分配/分解,还有协调与合作等等。这么做的目标在于说明、解析、设计与集成根据许多协作共同组建的系统,从而致使等问题求解系统与合同网、多级协商,根据知识为基础的协商等冲突解决协议的产生。分布式求解希望可以在发挥一定个体能力的基础上相互协作,提高效率。
早在上世纪八十年代,分布式计算就已经开始应用,其逐渐的渗透至许多领域,特别是英特网的应运而生,愈来愈多的人亟需综合集成分布在软硬平台且语义不能相容的软件,将他们的可重用性提升至更高的维度。在这种情况下,具备协作能力的技术吸引了很多不同领域的研究。松散型协同工作成为了许多个体与社团亟需的计算机支持功能,这极大的推动了对的行为理论、体系与通信语言的探索。
2.1.1 Agent定义和特性
Agent的理论和技术应用范围非常宽泛,在形形色色的领域,各不一致的系统中,其概念与功能亦有着大相径庭的区别。所以说,在目前,这项技术还不存在一个完全统一化的定义。在上个世纪九十年代中期,学者给出了这项技术的两种定义。第一种指的是弱定义,此技术用以最一般的说明一个软硬件系统,其具备多项特性,即如下文所述。第二种是强定义,该技术除了兼具弱定义之中的特性外,还涵盖了人类才有的特性。分别如下所述:
自治性(autonomy):指一个完全独立的计算实体,其自治能力有着不同的程度,能够在没有人或者是没有其余技术的干扰下,结合自身所处的环境对自己当下的状态进行控制,完成自主操作。
反应性(reactivity):Agent可以感知周围的环境,而且能够迅速的作出即时性的决策,反应迅捷。
社会性(social ability):Agent能够通过某类语言与其余Agent进行交流,然后获取彼此具备的信息,这实际上指的就是一个交互的过程。除此之外,其还具备下述的特性:
知识和信念:Agent具备智能的功效,可以积极的感知外部信息,然后取得自身亟需的信息,与此同时,其亦能够对形形色色的信息进行处理,然后展开思考决策,最终对外部环境形成作用,这指的就是知识。而对于信念而言,指的是该技术对自身当下所处的环境与状态的一种态度,这与外部环境有着密不可分的联系,伴随着后者的变化,其也会不断的改变,而且各个技术之间可以分享自身的信念。
意图和义务:Agent为了完成自身生命周期的最终目标,其首先会形成诸多短期的子目标,这些目标构建起来,指的就是意图。为了实现上文所述的多项目标,该技术会执行单独行为与任务,然后会完成这两者,这些指的就是义务。
理性和诚实:Agent仅仅使用有利于完成目标的行为,但是并不会影响目标实现或损害其他技术利益的行径,这就是其理性。与此同时,这项技术并不会刻意发布有谬误的信息去欺诈广大使用者,其凸显的情况非常真实,这指的就是该技术的诚实。
2.1.2 Agent系统的基本结构
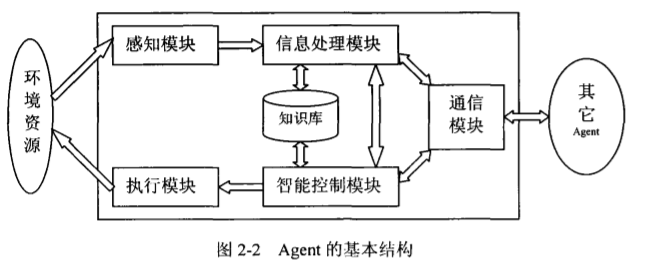
图2.2 Agent的基本结构
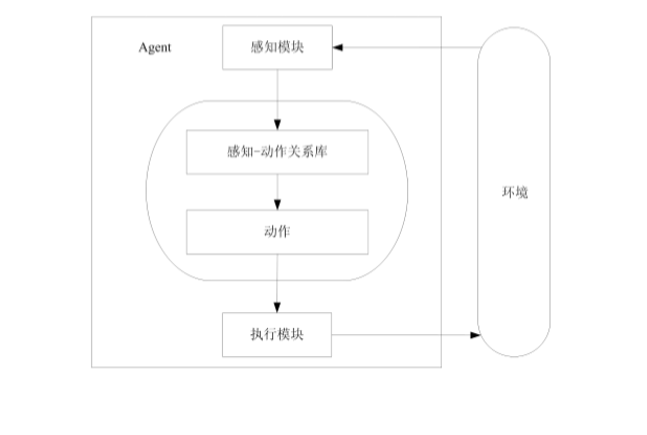
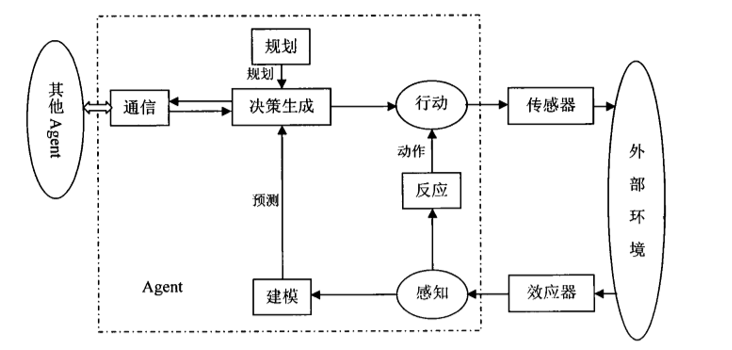
参考上图2-2所示我们不难发现这项技术的详细结构,其是根据诸多模块组建的。对于环境感知、执行以及通讯这三个模块而言,它们主要是与系统环境以及其他进行交互。对于信息处理模块而言,其重中之重就是对接收到的许多信息进行加工处理,最后也要进行存储。对于决策与智能控制模块而言,这是赋予智能的核心部件,其充分使用了知识库中的知识对得到的诸多信息进行更为深入的分析与推理,这能够给接下来的执行提供适宜的决策。能够将其分成多种类型,分别如下文所述:
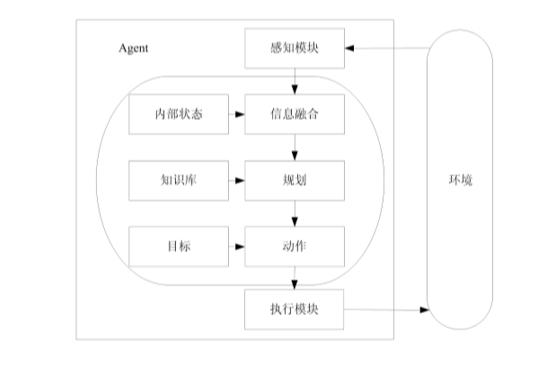
(1)慎思型Agent体系结构:此类型涵盖了世界与环境显示表示这两者的符号模型,通过符号操作来决策。其重中之重就是符号注意,是根据物理符号为基础的系统假设。在此类型的内部,存在对周边环境世界的符号描述,不仅如此,还有精神状态,该状态可以经过符号去推理并修正。其认识世界产生对外部环境的认知,基于此,对自身的心智进行整改,规划行为,有利于自身更好的融入环境,然后和其它Agent协作。其认知构件根据两个部分组成,前者指的是世界模型,后者指的是规划器。通过传感器去接收信息,然后对这些信息进行融合,形成修改目前状态的描述,制定好规划并完成一系列动作,通过效应器对环境发生一定的作用,鉴于其算法错综复杂,所以在适应环境的时候存在着一定程度的问题,参考下图2.3所示可以掌握其框图。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: