绞吸式挖泥船泥浆输送自动控制系统研究毕业论文
2020-02-19 09:16:36
摘 要
由于我国经济的飞速发展,带动了疏浚市场的更新脚步。我国地域辽阔,可水上运输的水道众多,使用挖泥船的需求远大于其他国家,一方面为了使我国相关疏浚行业在国际疏浚市场具有一定话语权,另一方面也是为了我国能更好的发展国内水上运输业。我国必须加大在疏浚行业的投入力度,为新技术新设备的创造提供一定的基础。
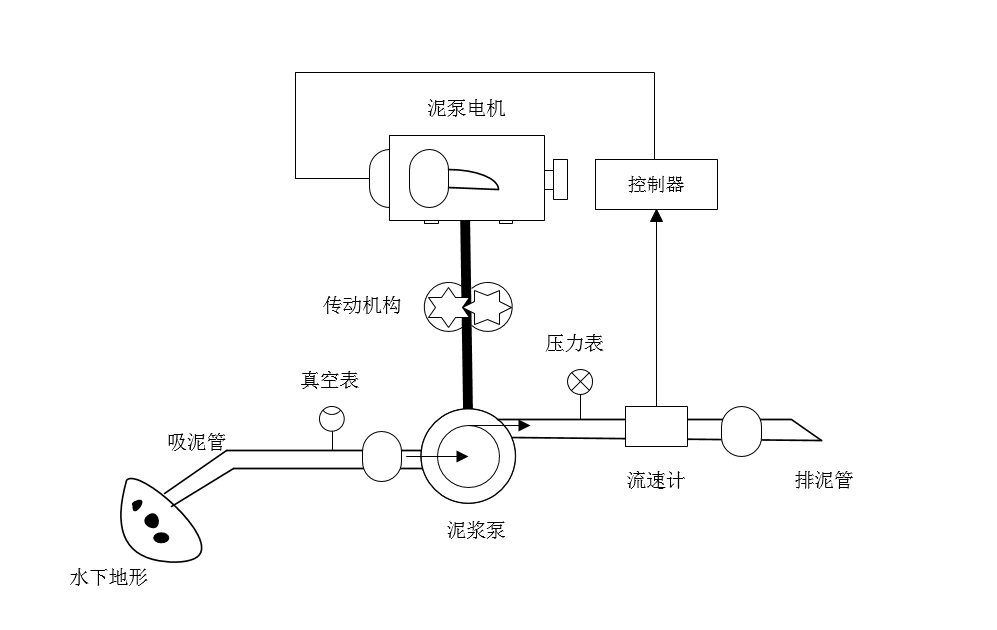
本文研究的主要核心是绞吸式挖泥船的泥浆输送系统自动控制研究。以PID控制器和异步电机矢量控制为核心,借助MATLAB等计算机工具,实现对泥浆流速的即时控制。通过对绞吸式挖泥船泥浆输送系统的三相异步电机、电机控制的泥泵、以及吸排泥管的工作原理学习,建立对应的数学模型,并以此为基础对实验对象进行仿真模拟实验。
本文首先是对国内相关疏浚行业做了一定的简介,提出了绞吸式挖泥船泥浆输送系统的发展研究现状,并且还粗略的介绍了国内外挖泥船的发展概况。通过现实挖泥船工作过程中具有的问题,提出了本文核心---泥浆输送系统的自动化控制研究。后分别介绍了挖泥船的各子系统的大概工作原理。同时,对本文核心泥浆输送系统的泥泵、异步电机、管道进行建模;再提出以PID控制器控制泥浆输送,采用最小二乘法对系统的泥浆浓度和泥泵转速进行辨识,输出PID控制下的泥浆流速。以得到数据与原数据进行比对,验证算法的可行性。
所设计的自动控制系统能够在一定程度上做到对泥浆输送的优化控制,这对现实工作中绞吸式挖泥船的更新换代能起到一定的启发作用。也能够为其他科研人员和师生提供小小的思路。
关键词:绞吸式挖泥船;泥泵;异步电机;泥浆输送控制系统;自动化;疏浚作业;PID控制器
Abstract
Due to the rapid development of China's economy, the dredging market has been updated. China has a vast territory and many waterways that can be transported on water. The demand for dredgers is much greater than that of other countries. On the one hand, in order to give China's related dredging industry a certain say in the international dredging market, on the other hand, it is also for China to better develop its domestic water transportation industry. China must increase its investment in the dredging industry to provide a certain basis for the creation of new technologies and equipment.
The main core of this paper is the research on the automatic control of mud conveying system of cutter suction dredger. With PID controller and vector control of asynchronous motor as the core, real-time control of mud flow rate is realized by means of computer tools such as MATLAB. Through studying the working principles of the three-phase asynchronous motor, the mud pump controlled by the motor and the suction and discharge pipe of the mud conveying system of the cutter suction dredger, the corresponding mathematical model is established, and based on this, the simulation experiment is carried out on the experimental object.
Firstly, this paper gives a brief introduction to the related dredging industry in China, puts forward the development and research status of the mud conveying system of cutter suction dredgers, and also gives a rough introduction to the development of dredgers at home and abroad. According to the problems existing in the working process of the dredger, this paper puts forward the core of this paper-the research on automatic control of mud conveying system. After that, the general working principle of each subsystem of the dredger is introduced respectively. At the same time, the mud pump, asynchronous motor and pipeline of the core mud conveying system in this paper are modeled. Then the PID controller is proposed to control the mud transportation, and the least square method is adopted to identify the mud concentration of the system and the rotation speed of the mud pump and output the mud flow rate under PID control. In order to get the data and the original data are compared to verify the feasibility of the algorithm.
The designed automatic control system can optimize the control of mud transportation to a certain extent, which can play an enlightening role in the upgrading of cutter suction dredgers in practical work. It can also provide small ideas for other researchers and teachers and students.
Key Words:Cutter suction dredger; Mud pump; Asynchronous motor; Mud transportation control system; Automation; Dredging operations; PID controller
目 录
第1章 绪论 1
1.1课题的研究背景、目的和意义 1
1.1.1课题的研究背景 1
1.1.2课题的目的和意义 1
1.2挖泥船发展现状概述 2
1.2.1 国内发展现状 2
1.2.2 国外发展现状 3
1.3绞吸式挖泥船泥浆输送系统研究现状 4
1.4本文研究主要内容 4
1.5 本章小结 5
第2章 绞吸式挖泥船系统概述 6
2.1 土壤切削系统 6
2.2 泥浆输送系统 8
2.3 定位桩系统 8
2.3.1 定位桩系统的工作原理 8
2.3.2定位桩系统的工作过程 9
2.4 台车推进系统 9
2.5 驱动控制系统 10
2.6 本章小结 10
第3章 泥浆管道输送系统的建模 11
3.1 异步电机的数学模型 11
3.2 泥泵的数学模型 13
3.3管道的数学模型 16
3.4 本章小结 18
第4章 泥浆输送系统自动化控制研究 19
4.1实验数据预处理 19
4.2 系统被控对象辨识 20
4.2.1 最小二乘法 20
4.2.2 具体操作步骤 21
4.2.3 模型表达式 24
4.3 PID控制策略的设计 25
4.3.1 PID控制原理 25
4.3.2 异步电机的矢量控制 26
4.3.3 PID控制策略研究 28
4.4 PID控制的建模与仿真 28
4.4.1 建模与仿真 29
4.4.2 PID控制的流速跟踪效果 29
4.4.3 PID控制 29
4.5 本章小结 30
第5章 总结与展望 31
5.1 论文总结 31
5.2 工作展望 32
致 谢 33
参考文献 34
第1章 绪论
本章在介绍挖泥船研究背景的基础上,主要讨论了课题的研究目的和研究意义。对国内外挖泥船发展现状和泥浆管道输送系统自动控制方面的研究内容作了系统的阐述,提出了本课题的研究内容及论文所开展的研究工作。
1.1课题的研究背景、目的和意义
1.1.1课题的研究背景
随着社会贸易经济体制的高速发展,由国内疏浚业市场的庞大需求引申出来了一系列的问题。河道、港口、沿海地区需要加大深度和扩大占地范围,淤泥堆积己经非常严重,越来越严重的水污染问题,仍然在役的用于水上作业的挖泥船大多数都存在着性能老化不环保、船龄偏大等问题,这一系列的难题滞缓了我国疏浚业的前进。我国地土面积宽广,并且我国还拥有众多江河湖泊、港口以及码头等,这致使我国疏浚作业的技术水平和工作量也随之加大,据统计,我国年平均有将近一亿立方米的泥土沙石沉积在各流域之中,这也使得我国目前的疏浚能力离所需要求相去甚远;一方面,随着国际海域贸易和内陆河流湖泊水上运输事业的高速发展,对国家的水上运输能力要求愈发增大,并且各种船舶的数量和吨位也在高速增加,这也加剧了对各港口码头、抛锚地和航运水道的水深和宽度的要求。另一方面因为国家可持续发展战略的绿色发展要求,必须加大对用于环保疏浚的挖泥船的投资建设。上述的种种都致使我们重视挖泥船的研究与发展。
挖泥船可大致分为耙吸式、链斗式、铲斗式、绞吸式挖泥船[1]。本课题对绞吸式挖泥船的子系统——泥浆输送控制系统做出相关研究,然而就现有的各大小型绞吸式挖泥船来看,其大致存在以下方面的难点:一是其操作方式大致上都是基于工作人员的手动控制为主,自动化控制程度低,这一操作方式决定了船舶工作效率不可能与期望值一致,其受到工作人员的操作水平、操作经验以及操作状态的影响,并且如果一旦遭遇紧急情况工作人员处理不当时,一个子设备乃至整个船舶都会发生事故造成重大事故 ;二是挖泥船工作环境的复杂性和恶劣性,导致其设备损坏率随工作时间的增长急剧增大。
就其泥浆输送控制系统来看,根据施工现场出现施工事故的统计,疏浚作业中有八成以上的事故故障都与泥浆管道输送系统有不可或缺的联系,并且工作人员解决这些故障至少要用去总作业时间一半以上。究其根本是自动化水平的低下导致的,自动化控制系统能够省时省力,安全高效的控制挖泥船进行作业。
总而言之,由于挖泥船泥浆管道输送系统收到的影响因素众多,各系统之间的相互关系也非常复杂,自动化程度较低,工作人员的状态、经验和理论水平也层次不齐,导致整个挖泥船系统故障频频发生,故此泥浆管道输送系统效率远低于理论值,因此,挖泥船泥浆管道输送系统自动控制研究还具有相当大的发展研究空间[2]。
1.1.2课题的目的和意义
由吸泥管、泥泵、柴油机和排泥管等多个部分构成的挖泥船泥浆管道输送系统,是绞吸式挖泥船中最复杂和最关键的部分,其能源消耗率占整个挖泥船系统总能耗的六成以上,所以为了提高船舶工作效率,提升船舶创收,就必须尽一切可能来提高泥浆管道输送系统的效率[3]。但是一方面由于实际作业过程中管道输送系统输送的物质构成十分杂多,并且现有的科研对管道的输送原理研究得不是多么的明了透彻,另一方面挖泥船泥浆的浓度控制和流速控制比较复杂困难,现水平还没有比较可靠的挖泥船泥浆管道输送系统工作效率评价方法,所以在日常的水上疏浚施工过程中泥浆管道输送系统的工作效率比书面上的理论效率要相去甚远[3]。另外,船舶的泥浆管道输送系统是施工环节中最容易出现问题的,诸如吸入排出管道堵塞、泥泵气蚀或卡堵、管道爆裂等故障,这些问题想要修复起来也需要较大的工作量。根据施工现场出现施工的统计,疏浚作业中有八成以上的事故故障都与泥浆管道输送系统有不可或缺的联系,并且工作人员解决这些故障至少要用去总作业时间一半以上,因此实际疏浚工作过程中泥浆管道输送系统的工作效率还是比较低下。还有,挖泥船泥浆管道输送系统的自动化控制程度较低,以手动操作为主的泥浆输送系统现在还是占据着相当大的一部分比例,由于工作人员的施工经验和操作水平因工作时长高低不一致,还容易受到工作时间过长会导致人体疲劳等因素的影响,这些问题都是导致泥浆管道输送系统工作效率不高的主要原因之一[4]。
本文既对绞吸式挖泥船的泥浆输送系统进行自动化控制提出研究,这一课题的研究能够较出色的解决泥浆输送系统的输送效率低下等问题。出色的自动化控制系统能够降低整个挖泥船的能源消耗,并且能根据输送介质的即时变化调整系统的输送能效占比,达到最经济性的工作方式。同时,它也能够解放工人,提高劳动积极性,降低操作人员的主观能动性对船舶的影响。更为突出的是,一旦施工船舶遭遇紧急情况,自动控制系统能够及时给出危害性最小的解决方案。
1.2挖泥船发展现状概述
1.2.1 国内发展现状
进入21世纪以来,我国经济贸易高速飞升,对海外诸国的贸易量也飞速增长,由此导致了海上运输行业的飞速发展壮大。为了进一步加大海运业的发展,我国由国家领导兴起了一波港口航道建设的高潮。根据国家交通部制定的相关发展规划,截止到2020年我国沿海港口的转入转出能力将达到40亿吨以上、码头吞吐集装箱的能力达也会达到2亿、数十万吨级以上原油泊位的接卸能力达到2亿吨、矿石15万吨级以上大型接卸泊位能力达 2 亿吨[5]。在一五年各省计划实施的“两会”中对“一带一路”基建投资的规划中,港口水上作业项目的投资引商额超过1700亿元。我国大量港口、航道需要扩大维修,填海造陆工程增多。此外,内地大陆经济的高速发展也带动了包括长江、黄河在内的内河航道、港口码头的发展,并且以国家相关法律法规为根据,建设以农业和环保为一体的的湖泊、水库的疏浚工程也随之增加,这些各种措施积极地推动了疏浚市场的发展。据统计零六到一二年这八年期间,我国建设的疏浚市场的规模在一直持续的扩大,到2009年为止其增长速度达到一个相对的巅峰。但由于受世界经济危机的影响,2009年以后我国疏浚市场建设速度逐渐变缓,但总的来看仍保持缓慢增加的态势。经过这多年的持续发展,到现在为止我国的疏浚市场创收额在全球疏浚市场中所占比例超过三分之一,对任何人来说这是一个不可反驳的具有极大活力和前景的超大市场。
我国挖泥船由过去几十年的水平低下到现如今的追上脚步,再到其中几方面超过世界水平,这不仅仅是几十人的努力。从五十年前往回看,我国挖泥船在数量和质量上都取得了可观的进步。,从1970到1980年这十年里开始我国挖泥船的独立设计和建造步入高速发展的道路。就算是大环境的优渥环境利于挖泥船的发展,由于我国技术与装备水平的底子很差,不能够完全满足国内市场的需求,对于小型绞吸式挖泥船来说,我国没有能力能独立设计和建造自动化水平高的船舶,并且在各关键技术和设备上也不能完全自主设计。对于中型绞吸式挖泥船我国只能依赖进口船舶,毫无建造环境,这也导致了海外各国对我们的技术讹诈。也因为船舶进口原因导致,船舶一旦损坏其维护困难,并且设备老化失效时也无任何备用。
“十五”过后,我国认识到了要想有发展就必须有自己的科研平台,政府开始一批一批的改进质量差、水平低的挖泥船队,这一措施既满足国内疏浚市场日益增长的需求,又能使我国在国际挖泥船市场中具备一定量的竞争能力。到了“十一五”期间,在“创新型国家”的指挥纲领下,斥巨资去学习买进国外先进的挖泥船制造技术,并且要对此进行创新,建造自己的品牌。“十一五”过后再到现在我国的相关企业已经掌握了挖泥船的核心技术,并在此基础上自主设计了多艘大型挖泥船。大型挖泥船船舶自主特色设计制造率占到九成以上,拥有了在役的不少大型甚至超大型挖泥船,如自主中交耙吸船“通途”号和绞吸式挖泥船“天鲸”号等[6]。
在不久的将来,海上丝绸之路不是没有形成的可能,将太平洋沿岸、印度洋沿岸和大西洋的各个通航口岸将连在一起就是一条繁荣的贸易通航路。这对我国的疏浚市场的发展带来了黄金机遇,并将促使我国不断地建设开发沿海港口,这一举措对我国疏浚企业的蓬勃发展提供了机遇和便利。竞争愈发激烈的国际市场会有越来越多的中国疏浚企业注入新鲜血液,当然这条路不可能是一片坦途的我国相当大一部分的疏浚企业肯定会被淘汰。国内挖泥船存在的问题有工作效率低下的问题,这会极大影响相关企业的核心竞争力,国内相对水平高的疏浚企业船舶的实际工作效率大约在设计生产时的理论工作效率的70%-80%左右,一些小型企业其技术水平更低,导致其工作效率也更低。
这些好的与坏的方面现决定了中国水利工程、河流湖泊航道及海域的施工量的大大加大,也说明中国的疏浚市场和挖泥船需求有着大片空白需要填补,这是对国内的挖泥船及其疏浚业高速发展的最至关重要的条件。在数年的施工过程中,中国疏浚业形成的行业框架是以航道、水利和地方疏浚实业为主;自我发展积累的疏浚施工技术和国产及部分引进的挖泥船等施工设备为辅,这是中国疏浚业的现有状态和更进一步更快更新发展的基础。到今天来看中国疏浚施工的主要发展任务是解决单一的水力工程问题,现有的需求是大量工程,这些都是有属于初期治理、大规模基建,并且施工环境和工人工作条件相对恶劣,近几年我国发展了具有复合功能的疏浚工程和专门的针对环保主题的疏浚项目,疏浚工程现有向专业化、多元化、系统化、自动化、综合性发展趋势。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
![9T3`HAWJ~$@[SM]ND{DOIW1](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw7172_202021991633537.png)