物理人机交互中的工业机器人外力检测方法研究与实现毕业论文
2020-08-13 20:49:10
摘 要
机器人技术涉及到感知、决策、控制与交互四大方面,其中感知是最基本的一个方面,感知的实现可以利用自带传感器或者附加传感器。利用自带传感器可以减少机器人质量并减小成本,所以本文采用的是无附加外力传感器的外力检测方法。
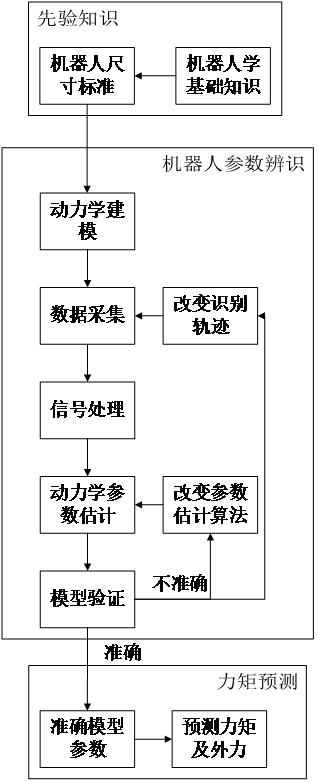
论文首先通过机器人的尺寸参数建立了机器人的运动学模型,给定一个关节空间的角度,将计算出的操作空间坐标与实际的相对比,确保运动学模型的准确性。然后以此为基础建立机器人动力学模型,用关节和力矩数据去计算动力学模型的参数。最后用这一模型去计算任意轨迹的预测力矩,实际力矩与预测力矩的差值即为机器人所受到的外力矩。本文在KUKA机器人平台上进行外力检测实验,实验结果表明该方法具有较高的准确性。
关键词:运动学模型;动力学模型;动力学参数辨识;外力检测
Abstract
Robot technology involves the four aspects including perception, decision-making, control and interaction, in which perception is the most basic aspect, and we can use a built-in sensor or an additional sensor to perceive. The use of built-in sensor can reduce the quality of the robot and reduce costs, so this article uses the external force detection method without additional external force sensor.
Firstly, the kinematic model of the robot is established by the size parameter of the robot. Given the angle of a joint space, the calculated operating space coordinates will be compared with the actual ones to ensure the accuracy of the kinematic model. Then I build the robot dynamics model based on this, and use the joint and torque data to calculate the parameters of the dynamic model. Finally, using this model to calculate the trajectory of any trajectory, the difference between the actual torque and the predicted torque is the external torque the robot receives. In this paper, the external force detection experiment is carried out on the KUKA robot platform. The experimental results show that the method has high accuracy.
Key words: kinematics model, dynamic model, kinetic parameter identification, external force detection
目录
第1章 绪论 1
1.1 研究背景与目的 1
1.1.1 研究背景 1
1.1.2 研究目的 1
1.2 国内外研究现状 2
1.3 论文内容安排 3
第2章 工业机器人动力学 4
2.1机器人学基础 4
2.1.1 位姿表示与齐次变换 4
2.1.2 DH坐标系及变换矩阵 5
2.1.3 机器人雅克比 6
2.2 工业机器人动力学 7
2.2.1 牛顿-欧拉动力学建模 7
2.2.2 模型的线性化 9
2.3 动力学参数辨识 9
第3章 外力检测 11
3.1 引言 11
3.2 运动学模型 12
3.2.1 KUKA机器人的连杆参数 12
3.2.2 KUKA机器人运动学模型 13
3.2.3运动学正解与评估 15
3.3 外力检测 15
3.3.1 数据采集 17
3.3.2 参数辨识与验证 18
3.3.3 外力检测 21
第4章 总结与展望 22
4.1 全文总结 22
4.2 研究展望 22
参考文献 24
附录 25
附录A 运动学模型 25
附录B 关节6参数辨识 26
致谢 29
第1章 绪论
1.1 研究背景与目的
1.1.1 研究背景
现代机器人技术的历史并不长,从上世纪六十年代第一台真正意义上的机器人算起,也不过近六十年。机器人技术是建立在机械工程、计算机技术、自动化、信息技术和人工智能等众多技术上的交叉学科,同时也极大地促进了这些学科的发展。随着机器人技术的进一步发展,它必将给人类社会带来深远而积极的影响。机器人技术涉及到感知、决策、控制与交互四大方面,其中感知是最基本的一个方面,机器人通过感知自身的位置、状态以及与周围环境的关系来做出决策,进而对整个系统进行控制,实现人机交互能力。
感知的实现可以利用自带传感器或者附加传感器。机器人内部传感器又称为本体传感器,主要用于机器人系统的自身参数检测, 一般会包括机器人的位姿、运动状态和作用力等方面。从机械学的角度来看,机器人是由连杆组成的开式或者闭式链,连杆之间装有关节,关节上装有驱动,连杆在关节空间中的角度决定了操作空间中的位姿。外部传感器用来检测机器人与环境间的空间关系,与内部传感器相比,外部传感器更加多样化:包括超声、视觉、光电传感器等,可以用来检测人机相对位置,预判人机相对运动,评估危险指数,并采取相应的安全措施避免碰撞的发生;还有安装在各关节的内部力传感器,可以通过读取传感器值来建立动力学模型,并通过比较预测的力矩值与实际的力矩值间的差,以判断是否受到外力。
然而附加传感器的外力检测方法会带来额外的成本并给机器人增加额外的质量,所以许多学者研究了无附加力传感器的外力检测方法。无附加力传感器的外力检测的关键在于动力学建模以及模型的参数辨识,在参数辨识方面,J.Swevers[1]采用了最大似然法进行参数辨识;Katayon Radkhah[2]、Azeddien Kinsheel[3]、M. Grotjahn[4]、Kyung-Jo Park[5]等使用最小二乘法进行辨识计算;G. Calafiore,M. IndriM[6]采用递推形式的最小二乘法进行辨识计算,递推形式与传统形式相比,计算复杂度低很多,尤其是当数据量较大时。这些方法都能有效地辨识出动力学模型的参数,并取得理想的精度。
1.1.2 研究目的
相关图片展示: