基于神经网络算法的无人船航迹控制器设计及仿真毕业论文
2020-02-19 15:02:50
摘 要
随着无人船技术的发展,无人船的应用领域广泛,航向控制是实现无人船自主航行的关键。近年来无人船控制算法发展迅速,其重点在于控制器如何快速的达到预期目标航向,在遇到外界环境干扰能够迅速响应恢复目标航向。
本文利用BP神经网络对原有的传统控制器加以改进,实现无人船航向控制。首先提出传统的控制器所表现出的参数整定困难问题,利用BP神经网络具有的可以逼近任意函数的特性,改进传统控制器;其次基于BP神经网络对控制器设计,搭建了神经网络系统结构,设计了控制算法和编写了运行程序,以解决传统PID控制器不能在线整定参数、不能适应实时变化的问题;最后根据无人船的简化模型,结合具体无人船得到了仿真模型,作为模型的被控对象,对该控制器的控制效果进行仿真验证。
利用MATLAB中的Simulink进行仿真的结果显示:改进的基于BP神经网络的航向控制器能够达到预期效果响应,且能够实现在线整定。仿真结果证明本文提出的基于BP神经网络航向控制器控制效果的有效性。
关键词:无人船;BP神经网络;航向控制器
Abstract
With the development of unmanned ship technology, the application of unmanned ships is extensive, and the heading control is the key to realize the autonomous navigation of unmanned ships. In recent years, the unmanned ship control algorithm has developed rapidly. The key point is how the controller can quickly reach the expected target heading, and can quickly respond to the recovery target heading when encountering external environmental disturbances.
In this thesis, BP neural network is used to improve the original traditional controller to realize the heading control of unmanned ships. Firstly, the difficulty of parameter tuning is presented by the traditional controller. The BP neural network has the characteristics of approximating arbitrary functions to improve the traditional controller. Secondly, based on the BP neural network, the neural network system structure is constructed. The control algorithm is designed and the running program is designed to solve the problem that the traditional PID controller can't adjust the parameters online and can't adapt to the real-time change. Finally, according to the simplified model of the unmanned ship, the simulation model is obtained with the specific unmanned ship as the model. The controlled object is simulated and verified by the control effect of the controller.
The simulation results using Simulink in MATLAB show that the improved BP neural network-based heading controller can achieve the expected effect response and can realize online tuning. The simulation results prove the effectiveness of the proposed BP neural network based heading controller control effect.
Key Words:Unmanned ship;BP neural network;heading controlle
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.1.1 研究背景 1
1.1.2 研究意义 1
1.2 国内外研究现状 2
1.2.1 无人船研究现状 2
1.2.1.1 国外无人船研究现状 2
1.2.1.2 国内无人船研究现状 2
1.2.2 航向控制方法 3
1.3 主要研究内容 4
第2章 无人船运动数学建模 5
2.1 无人船模型 5
2.1.1建立无人船坐标系 5
2.1.2 无人船水面运动基本方程 6
2.1.3 无人船运动数学模型 7
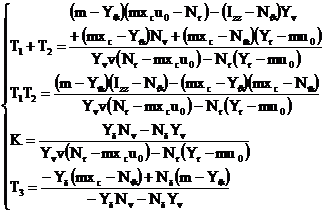
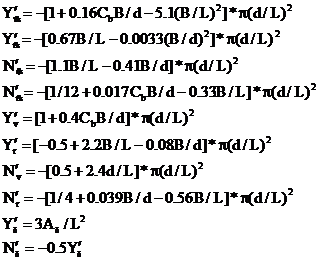
2.1.4 无人船操纵性指数计算 9
2.2 舵机特性模型 9
2.3 环境干扰模型 9
2.4 本章小结 10
第3章 无人船航向控制器设计 11
3.1 传统PID控制器 11
3.1.1 传统PID控制原理 11
3.1.2 数字PID控制器的控制算法 11
3.1.2.1位置式PID控制算法 11
3.1.2.2增量式PID控制算法 12
3.1.3 传统PID参数整定 12
3.1.4 常规PID存在的不足 12
3.2 基于BP神经网络的PID控制器 13
3.2.1 BP神经网络基础 13
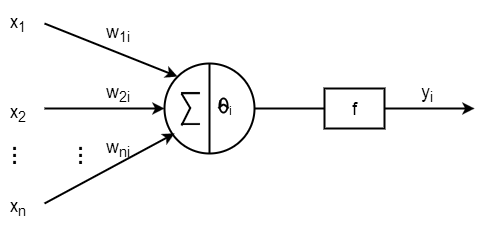
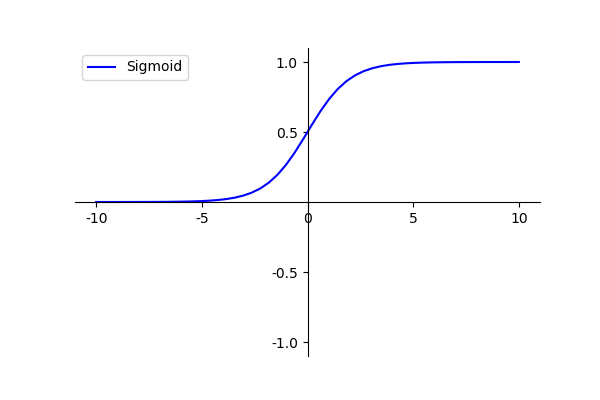
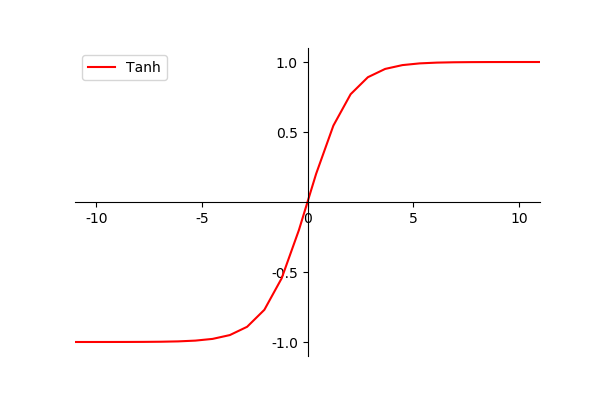
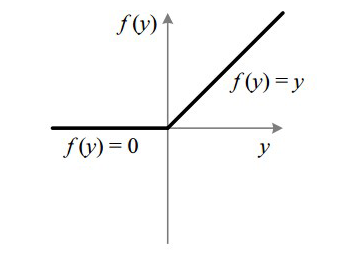
3.2.1.1神经元 13
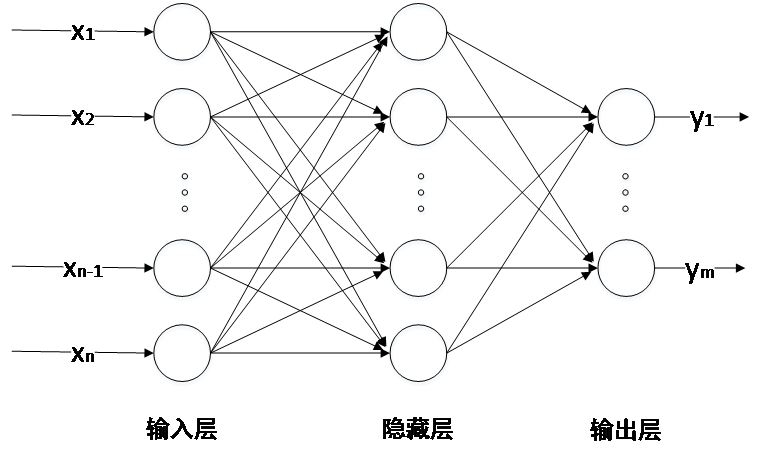
3.2.1.2 BP神经网络 15
3.2.2 BP神经网络控制器设计 17
3.2.2.1基于BP神经网络的PID控制器系统结构 17
3.2.2.2 BP神经网络控制算法设计 17
3.3 本章小结 20
第4章 航向控制器仿真分析 21
4.1 无人船数学仿真模型 21
4.2 仿真分析 21
4.2.1 阶跃响应仿真分析 21
4.2.2 加入外界环境干扰仿真分析 23
4.3 本章小结 25
第5章 经济性和环保性分析 26
5.1 经济性分析 26
5.2 环保性分析 26
5.3 本章小结 26
第6章 总结和展望 27
6.1 研究总结 27
6.2 研究展望 27
参考文献 28
致 谢 30
第1章 绪论
1.1 研究背景及意义
1.1.1 研究背景
在开发海洋资源的21世纪,大力发展海上船舶的科学技术和装备,提升船舶自主航行能力已成为各个国家的目标,随着海上船舶作业活动的日益频繁,发现传统船舶在海上作业的安全得不到保障,并且严重污染环境,需要的人力成本较高。无人船具有执行各样任务的特点,且安全性较好、成本低,因此无人船技术已被广泛应用生活各个方面,能够满足不同的海洋船舶作业任务的需求,在现代海洋资源开发和船舶作业中表现出色,船舶朝向无人化发展。
无人船航向控制是实现无人船自主航行的关键核心,航向控制器的设计显得尤为重要,传统船舶控制器采用PID控制器,其结构简单,控制效果良好一直在被使用,其原理核心是PID参数的求取,在海上无人船航行的过程中,无人船模型的被控对象的传递函数发生变化,传统的PID控制器不能实现参数的航行中整定,输出实际航向与预期航向存在误差,控制效果不好,因此对海上航行的各种环境适应性差,PID控制器的控制效果难以达到无人船航向控制的要求。随着新技术和算法应用在无人船的控制中,无人船的设计、应用发展迅速。目前,无人船在提高了国家的军事力量,军队配备着先进的无人船用于训练演习,在海洋检测和湖泊清理等任务上应用广泛。在水面无人船的航迹跟踪控制技术的发展,无人船能够根据指定的航迹航向向目标运动,去执行无人船水面的工作,而航向控制是航行的核心,因此研究出能精准快速的响应的无人船航向控制器是实现各功能任务的关键。
1.1.2 研究意义
在军事上,无人船在训练军队海上作战能力有所帮助,强大的海上军事作战能力可以加强海洋保护,加强海上防御能力,从而开发海洋资源。各个国家都在发展无人船技术,国外无人船的发展呈现出的趋势和特点:采用模块化设计方式和开放式的体系结构,增强功能的多样性;提高续航能力;开发先进的控制技术,提高自主航行能力[1]。因此设计出具有独具特色的和先进的无人船十分重要。在生活中,无人船可以用在海洋环境监测,湖泊的清理和水面治理等工作中,无人船在这些任务中表现出十分突出的优点,因此可以代替传统船舶完成各种任务。
因此,在军事力量建设中还是在生活中的应用中,无人船比传统的船舶具有明显的优势,无人船发展已成为必要性。根据对神经网络知识学习,利用神经网络的优点来解决传统控制器所存在的不足,设计一种改进后的无人船航向控制器,实现无人船的自主化航行,无人船航向控制器设计意义重大。
1.2 国内外研究现状
1.2.1 无人船研究现状
各国对无人船技术的研究时间已经很长,推动了无人船的的研发和应用领域扩展,在无人船领域技术美国位于世界前列,其次是以色列。
1.2.1.1 国外无人船研究现状
无人船在很早就用于战争中,对敌手造成大的伤害,美国等多个国家将无人船作为重要的研究方向。美国在无人船技术的研究处于世界前列,其起步时间早,一直在不断的加大投资无人船领域,取得了许多实质性进展。在2000年美国对无人船的使用是在军事上训练,主要与陆军部队结合,实现在登陆过程中的保护。最近几年又研制出了不同型号的无人船,渐渐的在军事中应用,如“斯巴达侦察兵”、“海狐”、水雷战无人船、反潜战无人船“天龙星”、大型水面无人船“蓝色骑士”等,其中技术发展较好的为“斯巴达侦察兵”。它可以达到大于35km的航行速度,能够持续航行8小时,航程达到150海里,整体长度大约在7-11m,采用了先进的模块化结构设计,由众多的系统集合,包括GPS、摄像头、雷达、自主驾驶系统等,配备有灵活的、可扩展的传感器和武器平台用于情报侦察和精确打击的任务。
以色列也注重无人船的开发研究,其最早在2003年研制了一种“Protector”号的无人船,此船可以自主航行也可通过远程遥控移动,配备导航用雷达、光学系统、武器系统等,全长9m。2006年以色列又研制出了“Stingray”号无人船,该船可以持续航行8小时,时速达到了40km/h,具有高级自主决策和自适应的能力,能够针对环境和任务的变化自动调节控制,实现智能巡视。以色列无人船的发展水平仅比美国低,现已推出了多款无人船,其中“保护者”的技术发展最为成熟,船长大约9m,每小时可以航行40海里,其具有良好的隐身技术、装备先进,降低了士兵的作战风险。
在美国和以色列之外的其他国家在无人船领域也展开了研究,并有自己的研究成果,推出了有自己特色型号的无人船。在2005年,德国研制出具有多功能的无人船“MMSV Ⅲ”号;意大利推出了一种用于海洋监测的无人船“Charlie” 号;在2009年,英国将摄像机、导航装置等设备加入无人船上推出一种用于试验标靶船;在2010年,新加坡研制出了一种用于反潜战的无人船,在该无人船上配有先进的雷达、声纳、各样的传感器。在2012年,Fraunhofer CML公司开始对无人货轮研究,将无人船用于生活中的运输代替传统船舶。
1.2.1.2 国内无人船研究现状
国内无人船的发展没有国外的研究时间长,开始研究的时间较晚,但国家对无人船方面的创新技术和装备研发比较重视,因此我国无人船技术发展迅速。在2008年,一款方便气象监测的无人船“天象一号”由中国气象局推出。在2014年,珠海云洲智能搭建了具有高性能的无人船平台,推出一系列的用于海洋环保监测,水下测距等无人船,弥补了国内无人船在该方面研究的空缺。上海大学推出的“精海”系列无人船,可以在海洋测量、海上巡逻上应用,实现了远距离控制和定位。无人船能够在气象参数、导航、搜救等方面上有较好的应用,搭建的智能测量平台具有良好的抗击海上风浪的能力和较高的机动性。ESM30是为实现水质采样及在线监测的全自动采样监测无人船,整体增加了无人船的载重能力,且具有体积小、重量轻的特点,在运动控制方面实现全自动导航。我国无人船现阶段还是存在着类型及型号较少,任务简单,持续航行时间短和航程短的问题,智能化水平不高,因此,我国在无人船核心技术上还需重大突破,还需要在自主化的方面进行深入研究。
1.2.2 航向控制方法
在船舶航行过程中,对于给定的期望航迹,船舶需要沿着期望航迹到达期望位置,在航迹控制中,涉及航向变化,航迹跟踪的关键技术之一为航向控制技术。针对无人船航迹跟踪航向控制,国内外的研究人员提出的控制方法:李雅普诺夫直接法;状态反馈法;输出反馈法;模型预测控制方法;滑模控制;神经网络等。
在这些控制方法基础上又有许多改进和优化的算法出现。在文献[2]中,提出基于动态面控制技术和单神经网络技术的自适应控制器,成功解决了传统后推法中存在的“计算膨胀”问题[2]。在文献[3]中,提出了运用模型预测控制算法对船舶运动轨迹进行控制,实现了对船舶参数的动态变化的仿真[3]。在文献[4]中,提出的在线SIMO神经网络控制器不需要对船舶模型的辨识过程,可以直接能用舵角控制航迹和航向[4]。在文献[5]中,提出设计一种直线航迹跟踪控制器,该控制器由引导算法和航向控制器两部分组成,引导算法基于LOS引导原理,解决了传统PID控制器的航向超调和振荡问题[5]。在文献[6]中,提出一种基于动态面控制的高效控制算法,这种算法运用神经网络进行全局逼近环境干扰,设计的控制器结构简单,很易于实现[6]。在文献[7]中,针对小型无人船航迹控制中具有快速性和鲁棒性问题,成功设计一种基于吊舱推进的航迹控制系统,可以满足大角度转向控制和小角度航向保持的性能要求[7]。在文献[8]中,提出一种模糊神经网络算法来设计航行控制器,模糊的隶属度函数通过神经网络分类回归确定,模糊控制之后在线整定PID控制器的参数,确保无人船航向的实时整定[9]。在文献[10]中,提出一种基于动态神经模糊网络的船舶运动控制算法,通过描述船舶动力系统方程,精确的建立了非线性系统控制模型[10]。在文献[11]中,针对Nomote数学模型,设计船舶航向鲁棒性控制器,引入了海洋的影响因素,设计了基于反向递推法的控制器[11]。在文献[12]中,针对传统控制方法很难对非线性、不确定性的复杂系统取得理想控制效果,将BP神经网络与传统的经典PID控制相结合,通过仿真发现其控制效果远远优于单纯的PID控制算法[13]。在文献[14]中,提出基于BP-PID控制,该算法具有响应速度快、鲁棒性好、超调小等优点,通过自学习调节重量,证明了基于BP神经网络的PID算法的有效性,为进一步的理论和实验研究提供了参考[15]。在文献[16]中,提出一种基于BP神经网络的智能PID控制方法,并设计了一种复杂的神经网络PID控制器,神经网络控制器具有较强的自适应能力和自学能力,该控制方法的控制精度高,适应性强,控制效果好[16]。
1.3 主要研究内容
本文的研究是在阐述了无人船的发展以及无人船航向技术研究状况的基础上,开展了基于神经网络算法的无人船航向控制研究。具体内容安排如下:
第1章为绪论。首先介绍了无人船的研究目的及意义,对国内外无人船发展现状做了分析,概括了无人船航向控制方法。最后,介绍了本文的章节具体安排。
第2章为无人船运动数学建模。首先对无人船的运动描述中建立两种坐标系,通过整体型思想和线性响应型模型简化建立了无人船模型,同时建立一种无人船操纵性指数的计算方法,为第四章仿真提供仿真模型;还建立了舵机特性模型和简化的环境干扰模型。
第3章为无人船航向控制器设计。本章通过学习传统的PID控制器的原理,控制方法,及其存在的不足,整定的方法,在此基础上加入神经网络改进,通过对BP神经网络的原理学习,为控制器的设计提供基础搭建神经网络模型,在控制算法的设计中介绍了具体步骤,并给出了编程的步骤,设计出了改进后的BP神经网络的无人船航向控制器。
第4章为航向控制器仿真。本章在根据上述的建模方法加入无人船的实际参数,建立了无人船仿真模型,利用传统PID控制器的整定方法求出的PID参数,在阶跃信号下仿真,对没有环境干扰和有环境干扰下的仿真响应曲线做了分析,仿真验证了改进后的航向控制器控制效果的有效性。
第5章为经济性和环保性分析。本章对无人船航向控制器的研究进行了经济性和环保性分析。
第6章为总结与展望。本章对本文无人船模型建立和控制器设计做了工作总结,无人船航向控制器还有改进提升的地方,对进一步研究做了展望。
第2章 无人船运动数学建模
在无人船的航向控制器的设计中,需要建立无人船的动态运动数学模型,建立一个满足精度要求,参数方便计算,能够描述系统运动规律的数学模型十分重要。本章采用整体型模型的思想,根据响应型模型建立了一个从输入到输出的三个自由度的线性响应模型,采用响应型船舶模型的流体动力导数来求的船舶操纵指数,同时对无人船的舵机特性模型和环境干扰模型做了分析,简化了海面上的风、浪等因素带来不确定影响。
2.1 无人船模型
2.1.1建立无人船坐标系
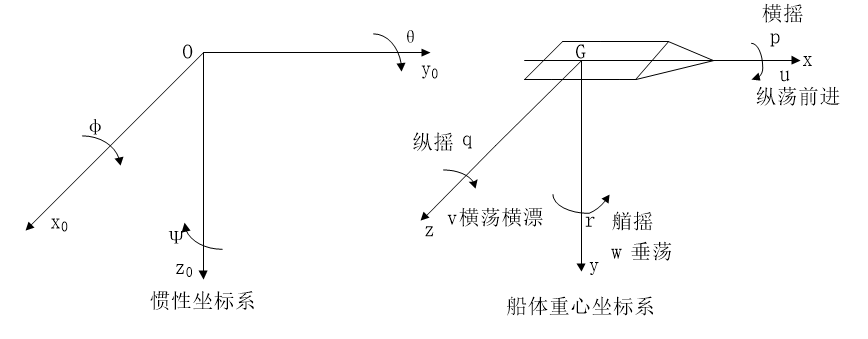
为了方便表示无人船在海面上执行任务的运动,一般无人船实际运动具有六个自由度,其中包括纵荡、纵摇、横荡、横摇、垂荡、艏摇,在描述无人船运动的过程,是在惯性坐标系下表示的,但比如有些转动惯量和船体与水动力相互作用力等难以表示,因此建立两种不同参考坐标系:惯性坐标系O-x0y0z0和船体重心坐标系G-xyz,两种不同坐标系如图2.1。惯性坐标系可以描述无人船实际运动位置和姿态,由三个空间位置坐标x0,y0,z0和三个姿态角即方位角Ψ,横倾角φ,纵倾角θ或者用三个空间运动速度 ,
, ,
, 和三个角速度p,q,r描述;在船体重心坐标系下可以根据围绕坐标轴的移动表示出前进速度,横漂速度,起伏速度和围绕坐标轴的转动表示出横摇角速度,艏摇角速度,纵摇角速度。
和三个角速度p,q,r描述;在船体重心坐标系下可以根据围绕坐标轴的移动表示出前进速度,横漂速度,起伏速度和围绕坐标轴的转动表示出横摇角速度,艏摇角速度,纵摇角速度。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: