基于SEDS的机器人路径规划研究毕业论文
2021-02-27 14:14:39
摘 要
随着工业化的发展,机器人在人类生活中起到了越来越大的作用。特别是在生产过程中,其优势已经广为人知:精度高,高效方便,提高产品品质等。机器人学涉及到了多种学科的综合应用,如计算机技术、电子技术、自动控制技术、机器学习、人工智能等。本文中的模仿学习就是属于机器学习的一种。
因此本文的主要内容如下:
首先是本文对机器人的末端执行器的运动进行建模。使用一阶常微分方程来对该运动进行描述,并使用混合高斯模型对运动的轨迹进行拟合。
对机械臂的运动轨迹进行建模后,使用SEDS-Likelihood算法对从实际的机器人采集的数据进行模仿学习。再从学习后的GMM模型出发对该轨迹进行还原。
本文将使用MLdemos软件以及基于Matlab的机器人工具箱进行仿真实验。主要实验内容有:基于SEDS算法的轨迹拟合,并使用PUMA560对该轨迹进行仿真。
关键词:臂形机器人,模仿学习,混合高斯模型,PUMA560机器人,SEDS算法
Abstract
With the development of industrialization, robots in human life has played an increasingly important role. Especially in the production process, its advantages have been widely known: high precision, efficient and convenient, improve product quality and so on. Robotics involves a variety of disciplines of integrated applications, such as computer technology, electronic technology, automatic control technology, machine learning, artificial intelligence and so on. In this paper, imitation learning is a kind of machine learning.
Therefore, the main contents of this paper are as follows:
The first is the modeling of the movement of the end effector of the robot. The first-order ordinary differential equation is used to describe the motion and the trajectory of the motion is fitted using the mixed Gaussian model.
After modeling the trajectory of the manipulator, the SEDS-Likelihood algorithm is used to simulate the data collected from the actual robot. And then from the GMM model after the study of the track to restore.
This article will use MLdemos software and Matlab robot toolbox for simulation experiments. The main experimental contents are: trajectory fitting based on SEDS algorithm, and use PUMA560 to simulate the trajectory.
Key words: Arm robot, Imitation Learning, Gaussian Mixture Model, PUMA560 , SEDS
目录
摘要 I
Abstract II
目录 III
第1章 智能机器人综述 1
1.1 研究背景及意义 1
1.2 相关理论与发展 2
1.2.1 机器学习理论 2
1.2.2 动态系统理论 3
1.3 本文章节安排 4
第2章 机器人运动学 6
2.1 位置与姿态 6
2.2 平移与旋转 8
2.3 D-H参数表示法 9
2.4 逆运动学 10
2.5 轨迹与运动 11
2.6本章小结 12
第3章 混合高斯模型及算法 13
3.1 高斯分布基本原理 13
3.2 混合高斯模型 14
3.3 基于混合高斯模型的最大期望算法 15
3.4 本章小结 16
第4章 基于混合高斯模型的动态系统 17
4.1 动态系统 17
4.2 非线性动态系统的稳定性分析 18
4.3 动态系统的参数估计 19
4.4 本章小结 20
第5章 实验与仿真 21
5.1 动态系统的稳定估计(SEDS)仿真 22
5.2 PUMA560仿真 26
5.3 本章小结 30
第6章 总结与展望 31
参考文献 32
致谢 33
附录A 34
附录B 35
第1章 智能机器人综述
1.1 研究背景及意义
自从工业革命以来,替代人类劳动的机器在人类社会中指数增长。从轻纺工业中珍妮纺纱机的发明到瓦特蒸汽机的广泛传播,第一次人类生产的产品多于人类自己所消费的产品,可以说自动化机械带来的不仅仅是市场上的巨额利润,还为人类社会的发展提供了巨大的动力,人类的平均生活水平也因此提升。
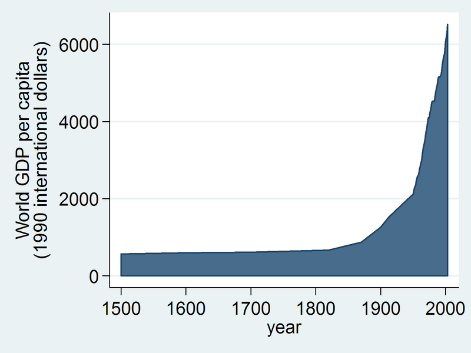
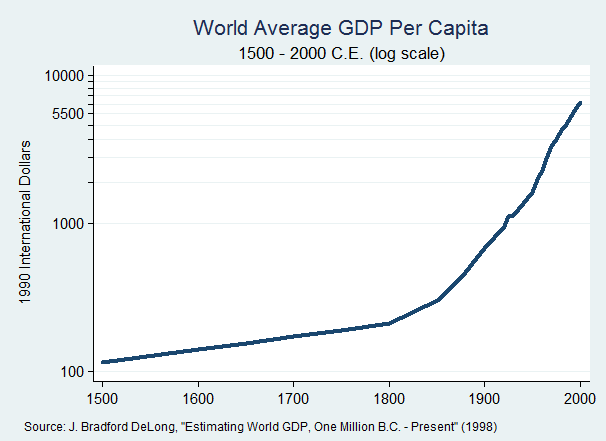
图 1-1 世界人均GDP增长
但是随着自动化机械的推广,人们对其的要求也随之提升。在20世纪,人们希望机器能够取代劳动中的重复性大、人力不可及的体力劳动,比如流水线工作,重型物体的装配运输等。工业机器人如图1-2所示。


图 1-2 工业机器人
第一个具有该功能的机器人专利于1954年由乔治 · C.德维尔发明。在之后的几十年里,数亿台自动化机器人被生产出来,在工厂里从事焊接、喷漆、装载、装配、打包、码垛等工作。[[1]]这些机器人按照现在的分类,还是属于工业机器人,其最显著的特点便是安装在固定基座上,对流水线上传递过来的工件进行加工。这样才能够保证机器人高精度地高速运作,最大限度的发挥其在生产中的作用。但是如何保证高速运动的机器人不伤害工作人员成了一个研究话题。在机器人没有自我意识的情况下,为了安全,必须将机器人的工作区间与工作人员进行物理隔离。此外,当需要进行工艺的变动时,如何最快的完成对机器人的调整。这些都是在实际生产中所遇到的问题。
随着电子产业的发展,人们提出计算机可以取代人,做一些重复性大的脑力劳动,比如大量的计算工作,或编程对机器进行控制。人们更是大力发展芯片产业和软件信息产业以期望能够实现强人工智能,来代替人脑进行复杂程度更高的计算与思考工作。而对于工业机器人的不足,在电子信息时代都在逐步的解决。首先便是安全问题,使用急停装置与智能检测装置来确保操作人员的安全,确保急停后不再发生次生事故,或者是通过监控来进行判断工作人员的安全。对于工艺变动的问题,现在基本每台现代化的工业机器人都具备了网络通信的功能,因此在进行工艺变动时,只需要技术人员将技术参数重新写入设备中,便可以调整整个流水线的运作。可以说当前的机器人以及相应的生产工具已经具备智能化的基础。



