协同队列驾驶系统中车辆可靠通信方法设计与实现毕业论文
2020-02-19 18:16:09
摘 要
近年来随着经济不断增长,城市发展的速度愈发迅猛,老百姓的生活越来越便利的同时,也引发了其他的问题:道路拥堵、事故多发等交通问题日益严重。随着4G通信的广泛运用、5G通信的快速发展、传感器及智能计算等技术的大量运用,协同驾驶技术逐渐成为新的研究热点。协同队列驾驶是指由一列或多列组成的无人驾驶车辆组,同组内车辆均具有车辆间距小、车速相同的特性,由此可以实现自动巡航等协同驾驶状态。
道路交通系统是一个多变繁杂的系统, 设计一种高效、安全的协同驾驶通信方法,才能在实现协同队列驾驶的同时保证道路交通安全。本文主要研究了基于协同驾驶队列车辆设计通信协议的情况下,通过TDMA的方式让队首车辆为成员车辆分配数据发送时隙,同时队首车辆根据不同的行驶状态和信道状况来动态调整数据发送频率,并探求应采取怎样的方法来设计相应协同队列驾驶系统通信协议,从而满足协同队列车辆通信的需求,保证行驶稳定性。
本文使用OMNeT ,来实现车载自组织网络(VANET)的协议算法的仿真,使用开源的Veins作为实验的仿真框架,使用交通仿真软件SUMO来生成仿真场景。利用 SUMO搭建不同的交通场景,建立协同队列车辆行驶模型。根据协同队列驾驶模型并基于IEEE802.11p设计通信协议,满足协同队列驾驶系统通信需求。并根据该方法设计相应协同队列驾驶系统通信协议,从而满足协同队列车辆通信的需求,保证行驶稳定性。
本文的创新点在于:队首车辆通过TDMA的方式为成员车辆分配数据发送时隙,同时队首车辆根据不同的行驶状态和信道状况来动态调整数据发送频率,并根据本文所设计相应协同队列驾驶系统通信协议,实现协同队列车辆通信的需求,保证行驶稳定性。
实验结果表明:在本文所设计的设计通信协议下,协同队列驾驶系统的通信需求基本得到满足,保证了协同驾驶的有效性和可靠性。
关键词:数据链路层;车载自组织网络;协同驾驶队列;分时多址;
Abstract
In recent years, with the economic growth, the speed of urban development has become increasingly rapid, people’s life has become more and more convenient. At the same time, some problems have arisen: traffic problems such as traffic jam and accidents have become increasingly serious. With the extensive use of 4G communication, the rapid development of 5G communication, and the extensive use of technologies such as sensors and intelligent computing, collaborative driving technology has gradually become a new research hotspot. Cooperative Driving refers to an unmanned vehicle group consisting of one or more columns. The vehicles in the same group have the characteristics of small spacing and the same speed, so the cooperative driving state such as automatic cruise can be realized.
The road traffic system is a complicated and complicated system. Designing an efficient and safe cooperative driving communication method can ensure the safety of traffic while achieving Cooperative Driving. This paper mainly studies the communication protocol based on the cooperative driving design. The TDMA method allows the first vehicle to allocate data transmission time slots for other vehicles, and the first vehicle dynamically adjusts the data transmission according to different driving states and channel conditions, and explore what method should be used to design the corresponding collaborative driving system communication protocol, so as to meet the needs of coordinated queue vehicle communication and ensure driving stability.
In this paper, OMNeT is used to simulate the protocol algorithm of the Vehicular ad-hoc network (VANET). The open source Veins is used as the experimental simulation framework, and the traffic simulation software SUMO is used to generate the simulation scene. Using SUMO to build different traffic scenarios and establish a coordinated queue vehicle driving model. According to the collaborative queue driving model and based on the IEEE802.11p design communication protocol, the communication requirements of the collaborative queue driving system are met. According to the method, the corresponding cooperative driving system protocol is designed to meet the requirements of the coordinated driving and ensure driving stability.
The innovation of this paper is that the first vehicle of the team assigns data transmission time slots to the member vehicles through TDMA, and the first vehicle dynamically adjust the data transmission frequency according to different driving states and channel conditions, and according to the corresponding coordinated queue driving system designed in this paper. The communication protocol realizes the requirement of coordinated queue vehicle communication to ensure driving stability.
The research results show that under communication protocol designed in this paper, the communication requirements of the collaborative driving system are basically satisfied, which ensures the effectiveness and reliability of collaborative driving.
Key Words:VANET;IEEE802.11p;Platoon;TDMA;
第1章 绪论
汽车是人们生活中必不可少的一部分,每年全世界汽车的保有量保持不断的增长。随着我国经济稳定持续的发展,我国汽车产业得到了非常好的发展机遇,根据公安部交通管理局官方发布的消息,截至2018年底全国汽车保有量达到2.4亿辆,与2017年相比增加2285万辆,涨幅达10.51%。
汽车产业的繁荣发展在提高人民生活水平,带动经济发展的同时,也带来了环境污染,交通拥堵,资源消耗,交通事故等恶劣后果,这会直接影响人民的生命财产安全。根据世界卫生组织提供的数据,每年全世界因道路交通事故死亡人数约有125万,相当于全球每天有3500人因为交通事故而失去生命[1]。由此可以得知,车辆保有量的不断增长与交通道路环境的复杂多变是造成交通事故的主要原因,因此逐渐引起各国政府关注。
为了减少交通事故的发生,需要运用更新的科学技术来解决交通安全问题。与此同时,越来越多的人将未来汽车的主流研究方向转向协同队列驾驶技术与无人驾驶技术,协同队列驾驶与无人驾驶技术的发展程度会对汽车行业甚至是对交通运输业产生深远的影响。这两项技术的优势在于:第一能够解放人类的双手,第二能降低发生交通事故发生的概率,保障了人们的生命财产安全。同时随着移动通信网络、传感检测、人工智能等核心技术的不断突破与发展,协同队列驾驶技术与无人驾驶技术将愈发成熟,同时也有望实现无人驾驶汽车的产业化。
1.1 国内外发展现状
5月10日,德国联邦运输和数字基础设施部(BMVI)开展了全球首次实际物流运输的协同队列驾驶测试项目。测试中司机驾驶两辆利用电子系统连接的卡车,实验总时长7个月时间,测试里程范围大约35,000公里,卡车驾驶员保持在15-21米之间的距离行驶,相比与传统的运输方式,安装在曼恩卡车上的协同队列驾驶系统在98%的时间内运行平稳,驾驶员的主动干预每2000公里才需要一次,远远低于预期,他们对整个测试中的舒适性和安全性表示认可。这次测试还证明了利用该项技术可以节省燃料,燃油消耗量降低了3%至4%。
本次测试结果表明:在高速公路上,利用协同队列驾驶技术连接的卡车能够保证行驶安全,这项技术安全可靠并且容易运用在物流公司的日常工作中,大约40%的运输可以使用协同队列驾驶完成。通过队列技术可以为客户提供更可靠的运输。
在协同队列驾驶中,每一辆车的行驶状态均会极大影响这个协同队列行驶的效果。google是最先研发无人驾驶技术的公司,其研发的全自动驾驶汽车能够实现自动启动驾驶与停车。除了传统汽车业强国,苹果、Uber等企业也已经将业务范围向无人驾驶汽车倾斜。
我国的协同队列驾驶技术在近几年也得到了迅猛发展,2015年国务院印发《中国刢造2025》明确将智能网联汽车列入未来十年国家智能制造发展的重点领域,明确指出到2020年要掌握智能辅助驾驶总体技术及各项关键技术,到2025年要掌握自动驾驶总体技术及各项关键技术;同年,《中国智能网联汽车标准体系建训方案》第一版出台。
近年来各地有关于自动驾驶的路测规定陆续出台。2017年12月,北京市公布国内首个自动驾驶路测规定,首批自动驾驶测试试验用临时号牌开始对外发放。上海市也发放了第一批智能网联汽车开放道路测试号牌,其中上汽和蔚来两家企业获得路测牌照。此外,重庆市也出台了相关的自动驾驶道路测试管理细则。
目前,长安汽车、百度等企业以及国防科技大学等军事院校的无人驾驶汽车走在国内研发的前列。例如长安汽车创造了无人驾驶汽车从重庆出发到达北京的国内无人驾驶汽车长途驾驶记录。百度汽车同样在北京进行了初次无人驾驶汽车在北京道路的实验并且取得了成功。而到2020年,无人驾驶车辆有望在北京到崇礼的延崇高速路上实现道路测试。相关技术的快速发展必定为协同队列驾驶以及无人驾驶的未来提供了强有力的技术支持。
1.2技术路线与研究内容
当前道路交通一大严峻的问题就是拥堵问题,车辆短时间内汇集在城市某一道路,加上无规律的变道加塞,使得道路交通愈发拥挤,直接导致车流量逐渐增大,行驶速度下降等恶性结果。如果能实现车辆短间隔匀速行驶,有计划得控制车辆的变道,交通拥堵的情况就能得到一定程度上的改善。
实现安全可靠的在协同队列驾驶系统,对保持交通系统的运行能力,保障交通道路安全有重大意义。协同队列驾驶系统作为智能交通发展的代表性产物,将成为现代智能交通的重要组成部分。
车辆间可靠的通信方法,正需要利用到车辆间主动通信(IVC)技术[2],针对协同驾驶队列车辆设计通信协议,协同驾驶系统中,车辆利用无线通信技术组成特定结构(例如簇或者队列),通过数据传输和信息共享并结合有效的控制策略,车辆能够保持较短行驶距离并实现自动驾驶,从而有效提高行驶安全和道路通行率。协同驾驶车辆行驶稳定性极大程度依赖于可靠高效的通信方法,由于协同驾驶特有的行驶形态和控制需求,已有的车联网通信技术无法满足协同系统通信需求。
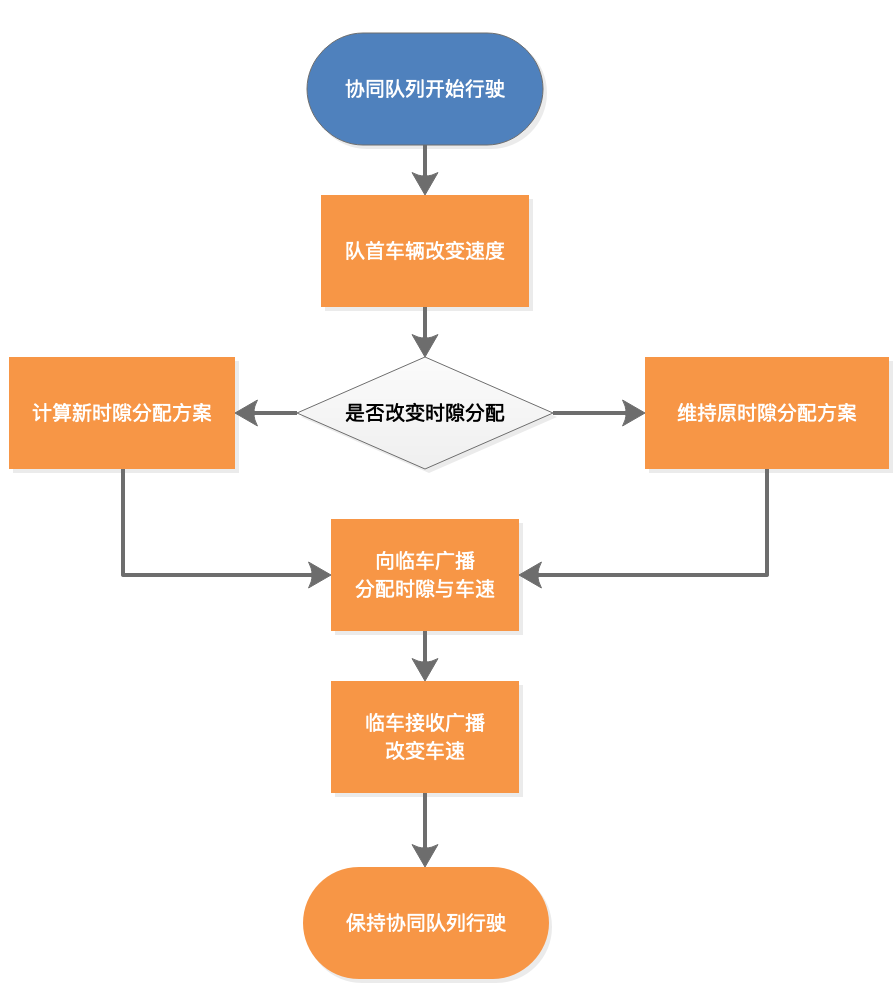
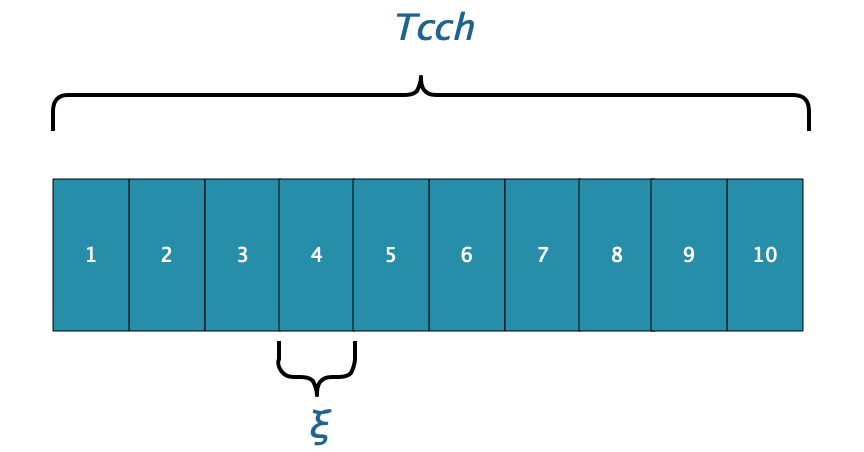
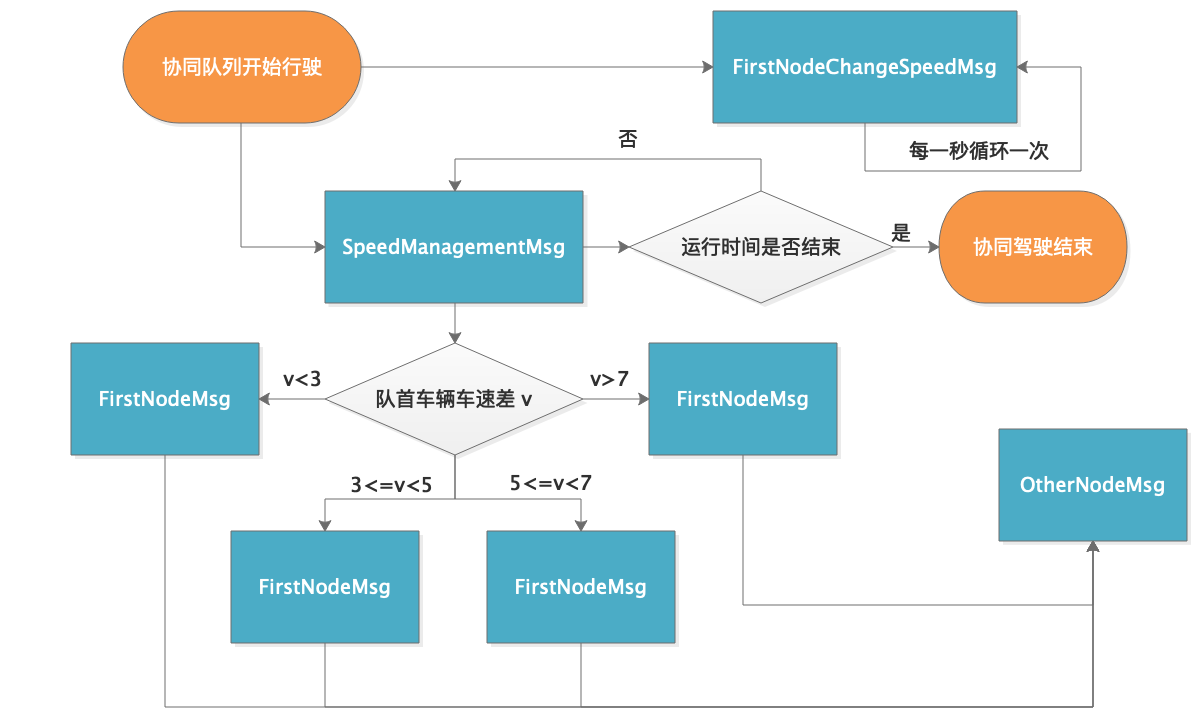
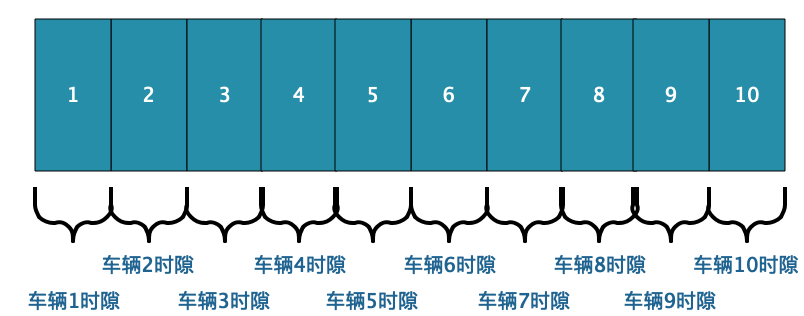
本文拟针对协同队列驾驶系统通信方法进行相关基础和创新性研究,由于当前交通环境下车辆较多,极易产生信道拥塞[3],数据传输无法满足协同车辆行驶稳定性需求[4],首先针对协同队列驾驶车辆设计通信协议,队首车辆通过TDMA的方式为成员车辆分配数据发送时隙,同时队首车辆根据不同的行驶状态和信道状况来动态调整数据发送频率,并根据该方法设计相应协同队列驾驶系统通信协议,从而满足协同队列车辆通信的需求,保证行驶稳定性。目前针对协同队列驾驶车辆的通信协议设计还存在以下问题,这些问题也是本文的研究内容:
1)在SUMO交通仿真软件中建立协同队列驾驶车辆行驶模型,并搭建不同的交通场景。
2)根据协同队列驾驶模型并基于IEEE802.11p设计通信协议,满足协同队列驾驶系统通信需求。
3)对所提出的协议进行实验验证,评估其有效性和可靠性。
1.3主要内容及章节安排
本文主要针对目前协同队列驾驶中存在的通信问题,从通信方式着手,设计与实现协同队列驾驶系统中的车辆可靠通信方法。
第二章的主要内容是介绍协同队列行驶的相关理论与技术,着重介绍IEEE 802.11协议与CSMA/CD协议[5]在本文中的相关应用,并明确本文目标。
第三章的主要内容是协同队列驾驶系统设计,介绍了本文最重要的两个知识点DSRC与TDMA,并给出了实验的具体实现方案
第四章的主要内容是对仿真实验结果的分析。
第五章的主要内容是对本文相关工作的总结与未来工作的展望。
1.4 本章小结
本章介绍了当前中国交通环境现状,从交通安全的角度分析协同队列驾驶的现实意义。以国内外协同队列驾驶的发展的状况为例,思考协同队列驾驶的可行性。最后讨论本文的技术路线与研究内容,为本文后续工作开头。
第2章 基于协同队列行驶的相关理论与技术
保障驾驶安全始终是智能交通系统的首要任务。每年都会发生大量的交通事故,不仅威胁到人民的生命安全,还会导致巨大的经济损失。如何能让车辆以高密度,稳定的速度行驶在道路上,同时还能保证道路交通安全,这是当前亟待解决的问题。以车载自组织网络为媒介,传输正在行驶中的车辆可能遇到的危险交通状况,并以此生成警告信标并发送给其他车辆,此方法有望成为提高驾驶安全性的解决方案。在车载自组织网络中,大部分高优先级的安全相关消息以车辆到车辆(V2V)模式或车辆到路侧单元(V2R)模式进行广播[6]。具体来说,在V2V通信模式中,每个车辆需要在单跳场景内向所有相邻车辆周期性地发送其状态信息广播,包括它所处的位置,行驶速度,车辆当前前进方向,加速度和转向信号状态等[7]。通过这些及时更新的信息,车辆的应用层便可以启用盲点警告,预碰撞传感,紧急电子制动警报等应急方案[8]。所有这些应用都依赖于广播通信,由于当前交通环境下车辆较多,极易产生信道拥塞,数据传输无法满足协同车辆行驶稳定性需求,需要针对协同队列驾驶车辆设计通信协议。
2.1 IEEE 802.11协议
在IEEE 802.11协议中,为了支持高优先级的驾驶安全应用,通常以10 HZ(每100毫秒)的频率在周期性地广播安全信标。这些高频的周期安全信标在向相邻车辆提供大量的信息的同时,也会导致信道的拥塞,特别是在车流量密集的环境下,例如晚高峰的城市街道或大型城市主干道的十字路口。如果没有得到有效的控制,大量聚合的信标将会造成相互干扰,危害道路交通安全。
2.2 CSMA/CD协议
因此本文将解决问题的重心移向mac层的IEEE 802.11p协议。CSMA/CD协议已经广泛地应用于有线网络的局域网。在无线局域网中,mac层在发送数据之前先对媒体进行载波监听。如果监听到有其他信号源在发送数据,就要延迟发送。但是在本文所需的场景下,无线局域网使用CSMA/CD协议就会存在如下问题:首先是“碰撞检测”问题,“碰撞检测”要求一个信号源在发送数据的同时,还必须不间断监测信道。一旦检测到碰撞,就要立即停止发送。但由于无线信道的传输条件特殊,其信号强度的动态范围非常大,因此在802.11适配器上接收到的信号强度往往会远远小于发送信号的强度。如果在无线局域网的适配器上实现碰撞检测,在硬件上的花费就会过大。更重要的是,即使能够在硬件上实现无线局域网的碰撞检测,也仍然无法避免碰撞的发生。这就表明,无线局域网不需要进行碰撞检测[6]。
CSMA/CD有两个重点,第一是在发送前要先检测信道,如要信道空闲就立即发送,信道忙就推迟发送。第二是发送的同时也要检测信道,一旦发现碰撞就立即停止发送。因此偶尔发生的碰撞并不会使局域网的运行效率下降很多。但无线局域网不能使用碰撞检测,只要开始发送数据,就不能中途停止发送,而一定把整个帧发送完毕。如果在无线局域网的发送过程中信道发生了碰撞,信道资源的浪费就比较严重。因此,无线局域网应当尽量减少碰撞的发生[6]。
2.3 协同队列驾驶的通信协议设计
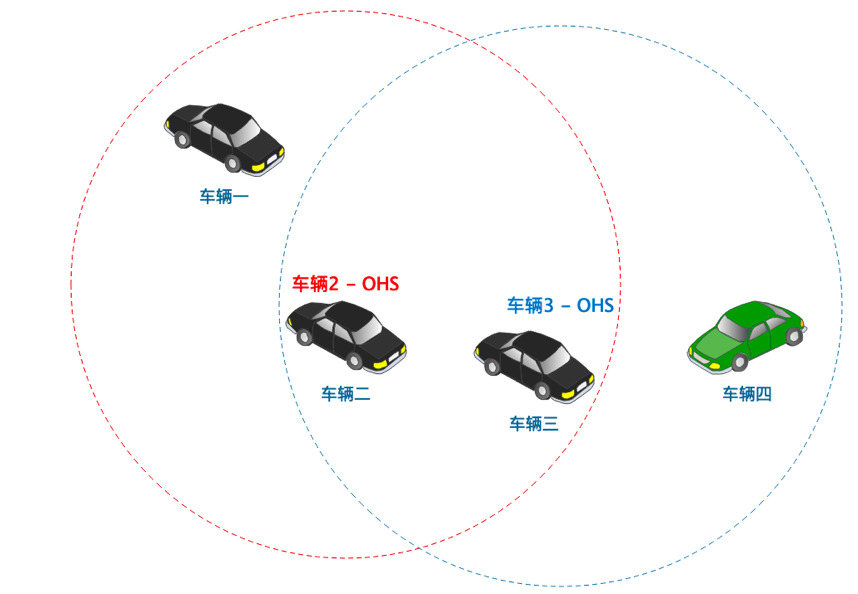
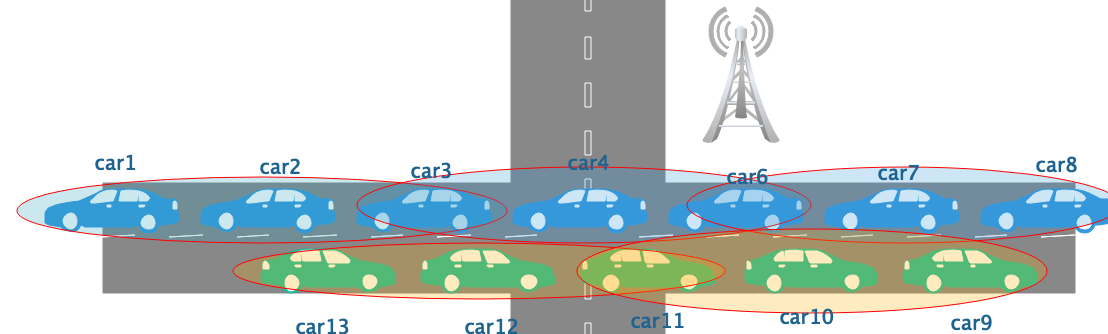
若将真实交通道路上行驶的车流视为协同队列,则就需要针对协同队列驾驶车辆设计通信协议。随着车辆联网信息交换技术的发展,人们已经提出了许多信标分配的方案,这些方案大致可以划分为两类:集中式方案和分布式方案。典型的集中式信标方案需要是将一组车辆划分到一个集群中,集群中队首的车辆负责以TDMA的方式分配时隙给其他集群成员。该策略能够保证集群内无竞争的消息传播,自适应的时隙预约调度能够保证充分利用信道资源。然而,维护集群的稳定以及克服集群间的干扰是一个很大的挑战,特别是针对密集车流的交通环境。在分布式信标分配方案中,信标频率、信标驻留时间、发射功率、争用窗口大小等组网参数都需要根据交通环境的变化进行自适应调整,以此达到更好的信标接收比和更低的消息传播延迟率。然而,在十分密集的车流环境中,分布式消息传播可能会导致信道拥塞。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: