建筑板材自动上下料机械手的设计毕业论文
2020-02-19 18:23:05
摘 要
生产过程的机械化、自动化在现代化工业的生产中已经成为了主题,而机械手正是在这一过程中发展起来的一种高新科技设备。机械手不仅是最早出现的工业机器人,也是最早的现代机器人,它能将工人从繁重的重复性劳动中解放出来,能在有害条件下操作以改善工人劳动环境,降低工厂的人力成本,它可以模拟人类手部的部分动作,在生产中代替人类实现在空间抓、放、搬运物体等,它对于提高产品质量,提高生产效率,改善生产条件和加快产品更新换代起着重要作用。
随着科技的发展与进步,机械手的功能也是越来越多,越来越广泛。本次设计主要是以玻镁板生产线为目标,设计建材自动上下料机械手,包括机械设计,液压传动系统设计,PLC控制系统设计等。
关键词:机械手,上下料,设计
Abstract
The mechanization and automation of production process has become the theme in the production of modern industry, and the manipulator is a kind of high-tech equipment developed in this process. Manipulator is not only the earliest industrial robots, was also one of the first modern robot, it can liberate workers from heavy repetitive work, can operate under harmful conditions to improve labor environment, reduce the human cost of the factory, it can simulate human hand part of the action, in production to replace human realize catch in the space, place, moving objects, etc., it to improve product quality, improve production efficiency, improve production conditions and speed up product upgrading plays an important role.
With the development and progress of science and technology, the functions of the manipulator are more and more extensive. This design is mainly based on glass magnesium plate production line as the goal, design of building materials automatic loading and unloading manipulator, including mechanical design, hydraulic transmission system design, PLC control system design.
Key words:Manipulator,Loading and Unloading System,Design
目 录
第1章 绪论 1
第2章 自动上下料机械手的设计方案 3
2.1 工业机械手的组成 3
2.2 工业机械手的规格参数 4
第3章 机械手各部分的设计和分析 5
3.1手部的设计与分析 5
3.1.2 气吸式手部的设计 6
3.2 腕部的设计与分析 7
3.2.1 腕部设计的基本要求 7
3.3 臂部的设计与分析 8
3.3.1 臂部设计的基本要求 8
3.3.2 臂部的设计 11
3.3.2.1臂部做升降运动的油缸驱动力 11
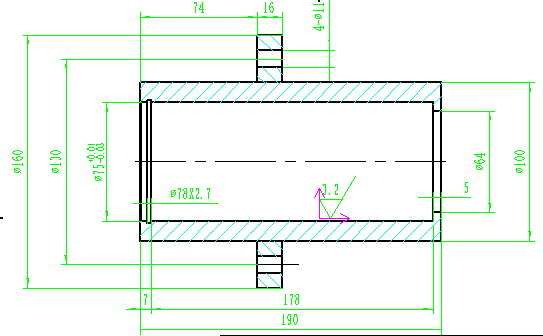
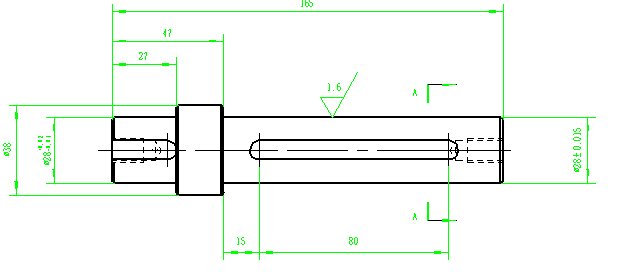
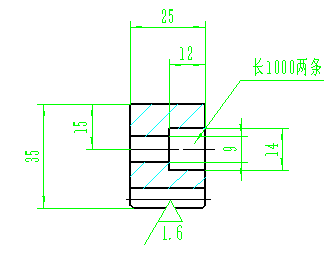
3.3.2.2 确定油缸的结构尺寸 12
3.4 机身的设计 17
3.4.1 齿轮齿条的选取 19
3.4.2 电机的选取 21
第4章 控制系统的设计 21
4.1可编程控制器控制 22
4.1.1 系统需求分析 22
4.1.2 系统硬件设计 23
4.1.3 系统软件的设计 24
4.1.4 人机交互界面的设计 26
第5章 总结与展望 28
参考文献 29
第1章 绪论
工业机械手是机械与电子技术相结合而产生出来的一种高科技产品,人们为了追求更加高效的生产方式与更加安全的生产环境,工业机械手得到了不断的开发与应用。由于机器人技术的应用和深化,使得工业机械手在各行各业中都得到了应用并不断摸索着新的应用方式与方法。按用途分类可分为专用机械手和通用机械手。
上下料机械手适用于生产线的上下料、工件转序、工件翻转等,它能够帮助机床进行自动化的生产过程,并且采用了集成加工技术。在国内目前很多企业机床仍然使用的是工人手动的去给机床进行上料或者下料,这只是在产品种类比较单一、产品产量要求不高的时候比较适用,但是随着社会的进步和科技的发展,产品的更新换代也是越来越快,这种采用专用机械和人力做工的方式进行上下料的做法就被发现出来了很多缺点,一方面专用机械结构复杂、占地面积大,不易于修理和流水线自动化的生产;另一方面也会加大人工的劳动强度,加大了人精神上与身体上的劳累容易发生工伤事故,而且人工的效率也比较低下,人工进行机床的上下料得到的产品质量也不稳定,不利于大批量的生产。
使用自动上下料机械手就能比较好的解决上面的问题,自动上下料指的是机械生产和数控加工的过程中,给生产机械和机床进行周期性的上下料,此项工作工作强度大、重复性强并伴随着一定的危险性,人工已经不太适合去操作了,而自动化机械手就非常适合此类操作。机械手可以迅速准确的进行工作,并且长时间的重复工作并不会影响其工作效率,结构简单易于维护修理,能进行各种不同产品的生产工作,节省了人力物力,大大降低了工人的劳动强度,并且提高了产品的生产效率和稳定性。
工业机械手是一种非常适合代替人力劳动的高新科技产品,因此它的应用非常的广泛,在各行各业中你都看到它的身影,特别是在工业生产中,下面就是一些比较常见的应用:
①单个机器的自动化运行:生产中有很多的机械设备如果让工人手动操作的话,效率会比较低下,但是用上机械手自动生产的话,能跟好的发挥这些机械的作用,比如自动上下料机械手、注塑机等。
②建造各种零件或者装卸材料的自动线:机床之间各种不同零件的传送、或者各种材料的装卸,都可以由机械手来完成,从而使得一些单机工作的机械连接成为自动生产线。
③进行人类难以做到或者环境有害的工作:总所周知,在很多工厂中存在着很多危险地带,也有很多自身所生产的材料或者原料都是对人体有害的,人类也需要到各种危险的地方进行探索,日海底。火山口、悬崖等,这些危险或者难以完成的任务就可以交给机械手来完成。
工业机械手的应用是数不胜数的,它的出现解决了很多人们生产、探索、作业上的难题,给人们带来了巨大的经济收益。它的特点包括:
①有较强的环境适应能力,人类在很多环境中是很难或者无法正常工作的,比如高温、有毒害气体或者有放射性等问题,但是机械手不同,只要根据环境用合适的材料去制造它或者给它加上防护膜,它都可以长时间的正常工作,并不会有人体的那些弱点。
②吃苦耐劳,人类如果长时间的重复同一个动作,就会感觉到精神和肉体上的双重疲惫,如果进行强度较大的工作会比较快的失去劳动能力,而且以上两项重复性强、工作强度大的工作还会加大工人发生事故的可能性,而机械手可以完美解决这些问题,只要记得定期给它进行保养。维修就行了。
③工作速度快、失误少,人为的操作难免会出现一些失误,导致产品质量降低,人的动作也存在着快慢,并且会随着工作时间的加长而使体力流失从而越来越慢,但是机械手在正常工作的前提下可以保证持续快速生产和较小的工作误差。
④灵活通变,生产技术是在不断发展的,产品也是在不断优化的,生产线经常需要生产不同种类的产品,机械手可以通过改变自己的操作程序来不断的改变自己的作业内容,从而适应这种变化,并不需要跟换太多的设备来进行不同的生产任务。
第2章 自动上下料机械手的设计方案
2.1工业机械手的组成
工业机械手主要由执行机构、驱动系统和控制系统等所组成。各系统之间的关系如图所示
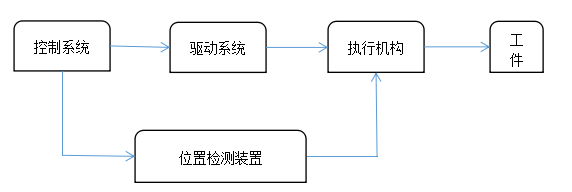
图2.1 工业机械手的组成
(1)执行机构
在驱动力的作用下运动的部件
①手部,如同人手一样,是机械手与外界互动的重要部分,根据互动方式的不同可以分为夹持式和吸附式两种。夹持式,就是如同人的手指一样爪状,根据抓取对象形状的不同,可以设计成各种不同的形状。吸附式,是碗状的吸盘,一种是用吸盘内外气压差来吸取工件,另一种是电磁力来吸取工件。
②腕部,手指和手臂通过手腕连接在一起,手腕主要承担着支撑的作用,他还能通过旋转、摆动的方式决定手指在空间中的角度,从而进行着各种角度的搬运工作。
③臂部,是连接手腕与机身的部分,同时承担着支撑手腕和手指以及被抓取目标的作用,并且带动着他们进行运动。
④机身,如同人的躯干,支撑和链接着身体的各个部位。
⑤行走机构,并不是所有的机械手都带有着个部分,只是为了而完成特定要求存在的。
(2)驱动系统
通过动力的形式,将控制系统的命令传达给执行机构,让它开始工作。有气动、液动、电动和机械四种。
(3)控制系统
有点动控制和连续控制两种。它统领着整个机械手,人类通过向他下达指令来操纵者整个机械手的运动,还有着监督的作用,它监督着机械手的动作,当发生错误时会发出紧急信号或者停机。
(4)位置检测装置
记录被测部分的空间位置,并反馈给控制系统,将记录的数据与设定的数据进行比较,如果有比较大的误差,则开始调整。
2.2工业机械手的规格参数
是机械手标准和功能的决定因素,通常需要考虑下面几种因素:
- 抓重:在一定的运动条件下,能够抓取的重物的最大重量,单位为N
- 自由度数目:除去手爪以外的部分运动时的自由度数目。
- 定位方式:固定机械挡块、可调机械挡块、行程开关、电位器及其他各种位置设定和检测装置;各自由度所设定的位置数目或位置信息容量;点位控制或连续轨迹控制。
- 驱动方式:气动、液动、电动或机械传动。
第3章 机械手各部分的设计和分析
3.1手部的设计与分析
直接与工件相接触,根据抓取对象的不同,可以设定成各种不同的形状与结构。常见的有夹钳式、气吸式、电磁式等。本次设计的抓取对象为表面光滑的薄板,主要考虑气吸式手部设计。
气吸式手部式利用吸盘(即用橡胶或者软性塑料制成的皮碗)内形成的负压将工件吸住;适用于搬运一些薄片形状的工件。
气吸式与夹钳式手部相比较,气吸式具有结构简单、成本低,重量轻,表面吸附力分布均匀,安装方便、操作简单,但要求工件表面平整光滑、无油和无孔。
3.1.1气吸式吸盘选用要求以及吸盘结构形式
(1)气吸式吸盘选用要求
①拥有强大且稳定的吸力,因为吸盘的吸力大小不仅与吸盘的直径、气体的流;量和气压的强弱有关,还与被吸取工件的形状和表面粗糙度有关,所以可在气路中增设减压阀来调节吸力大小来保证吸力的一定。
②应该根据抓取弓箭的要求来确定吸盘的形状和数量。
③选用多个吸盘盘的时候,要根据工件的大小和形状进行合理布局,来确保运输过程中工件的平衡稳定。
- 吸盘的结构形式
吸盘是直接与工件接触吸附工件的,它有软性塑料或者耐油橡胶制成碗状、杯状或者与工件类似的形状。目前常见的橡胶吸盘有以下几种:
①吸盘内部为不带皱纹的光滑曲面,其结构简单,制造容易,吸力小。
②吸盘内带皱纹的,并在边缘处压有3~5个同心凸台,以保证吸盘吸附的可靠性和吸力大小。
③吸盘内带有加强筋,可提高吸盘的强度和寿命。
3.1.2气吸式手部的设计
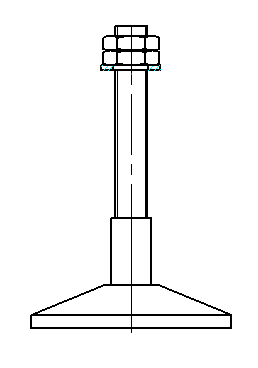
图3.1-吸盘示意图
吸盘吸附过程中吸盘吸力为:
 (N) (3.1)
(N) (3.1)
式中:S—吸盘面积(mm2),S= D2,D为吸盘直径;
D2,D为吸盘直径;
 —吸取工件准备运动时的安全系数,它的值可以为1.2~2;
—吸取工件准备运动时的安全系数,它的值可以为1.2~2;
 —工况系数,通常可以是1~3;
—工况系数,通常可以是1~3;
 —方位系数,垂直吸附工件的时候,与摩擦系数f有关1/f,橡胶吸盘吸附金属金属材料时,取f=0.5~0.8;当吸盘水平吸附时,取K3=1:;
—方位系数,垂直吸附工件的时候,与摩擦系数f有关1/f,橡胶吸盘吸附金属金属材料时,取f=0.5~0.8;当吸盘水平吸附时,取K3=1:;
 p—吸盘内外压差(MPa)
p—吸盘内外压差(MPa)
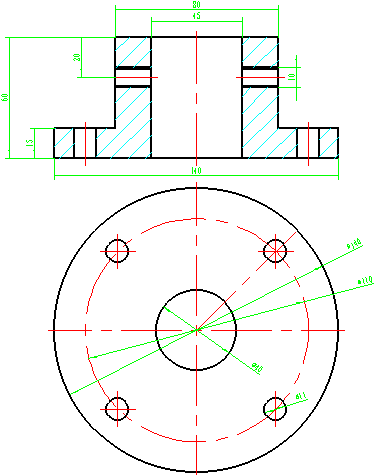
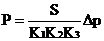
此次设计的目标工件规格为:1220*2440*6mm,重量为80kg;
总的吸盘面积:
上述计算出来的是将工件吸附起来所需要的吸盘的总面积,但是为了工件运输过程的稳定性和设计的合理性,所以要选择多个真空吸盘共同作业,完成对工件的吸附运输工作。根据工件的规格,此次设计一共选用6个吸盘,将6个吸盘平均分布在运输小车上。
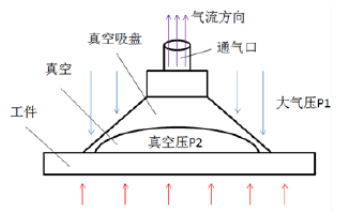
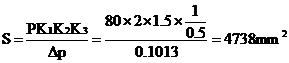
图3.2-真空吸盘的受力分析图
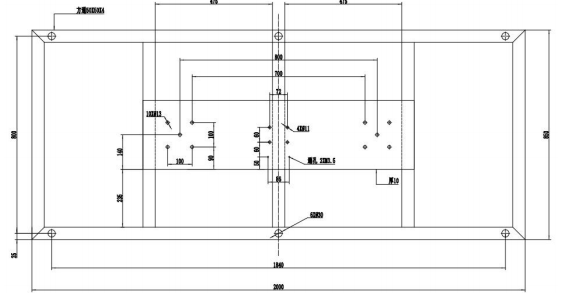
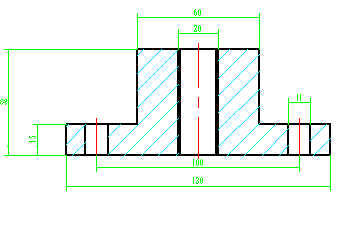
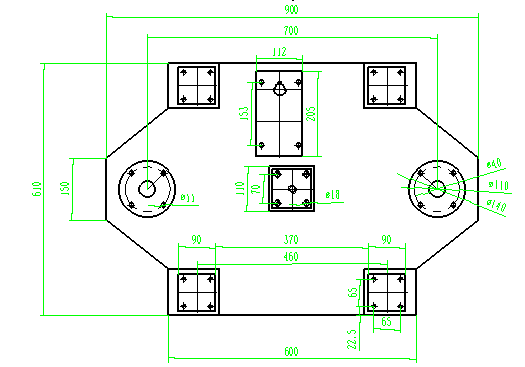
图3.3-吸盘架
3.2腕部的设计与分析
手腕连接着手指和手臂,他还能通过旋转、摆动的方式决定手指在空间中的角度,使机械手能够完成一些动作复杂的运动。
3.2.1腕部设计的基本要求
①组成元件之间紧密连接、部件总质量小。手腕安装在手臂的最前端,它会将自己与手部的载荷全都传递给臂部,会给臂部带来很大的压力,影响着它的结构与功能。
②全方位的思考、合理规划。除了自己力与运动和结构与性能之外,还应该全方位的思考、合理的规划。比如与其他零部件之间的作用关系,自己身上各种元件的安装和布置,乃至保养、维修等问题
③考虑工作环境和目的。对于在特殊环境如:异常的高、低温或在腐蚀性介质中工作时,腕部局应该充分考虑到环境对于玩不得不良影响(如热胀冷缩,对机械的腐蚀等)。
对于一些动作简单的专用机械手,为了简化结构,可以不设置腕部,将手部直接装在臂部前端。
本次设计的机械手动作十分简单,仅有水平与上下移动,为了简化结构可不设置腕部。
3.3臂部的设计与分析
臂部是主要的运动部件。它接受这来自手腕和手部的载荷,并带领着他们在空间中进行运动。它不仅要承受来自各方面的力,又作为机械手主要运动的代表,因而它的规格参数对于机械手的工作能力有着直接的影响。
3.3.1臂部设计的基本要求
臂部主要是根据机械手需要进行怎么样的生产来决定它应该如何去运动,从而来设计结构的,因此,要符合一些基本要求:
- 具有比较好的承受负荷的能力,自身要轻便。
刚度通常决定了手臂承受负荷的能力,伸缩臂杆的长度就影响各刚度的好坏,越短刚度就越好,但是也不能一味的缩短,不然会影响到正常的工作能力。除此以外,还需要从别的方面来进行调整:
①设计合适的截面形状和尺寸来抵抗力的影响
臂部受力一般为扭转和弯曲,应该选用抗扭和抗弯刚度比较高的截面形状。如果截面面积和材料的面密度都相同的话,工字钢的惯性矩要比圆钢大得多,这说明了截面的形状对于手臂的刚度有着不小的影响,所以要进行妥善的设计。
②提高支撑件的刚度,选择支撑件间合适的距离
任何物体人到力的作用都会发生或大或小的形变,除了自身的刚度外,臂杆的形变量还受这支撑件的影响,取决于它们的刚度和间距。为了提升支撑刚度,除了支撑件的形状和刚度外,还需要考虑提升配合面之间的接触刚度。
③合理布置作用力的方向和位置
应该结合具体的受力情况进行结构设计,用合理的结构让各作用力相互影响,从而减小他们的合力或者消除它们的影响。
④结构简单紧密
过多的元件和过大间隙,都会使手部的刚度降低,因而需要尽可能的简化结构,全方位进行综合分析,合理调节补偿环节来减小部件之间的间隙,合理调节各环节的稳定性来简化结构。
⑤提高配合精度
相比于竖直放置手臂如果是水平放置的话,导杆会承受更大的自重和抓取工件的重量,所以要提高它的刚度,这就需要提高缸体与活塞的配合精度。
- 运动速度要快、受到的惯性力要小
手臂的运动速度,体现了机械手的生产水平,一般是根据生产的节拍和手臂需要运动的距离来决定的。惯性力的大小与物体的质量与加速度有关,所以手臂在运动过程中要尽量做到匀速运动,但是在启动和停止的时候必定会有一个加减速的过程,所以要尽量缩短这个时间,来减少手臂所受到的冲击。
手臂伸缩时产生的惯性力为
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: