基于智能算法的无人机飞行控制系统设计毕业论文
2020-02-19 18:59:50
摘 要
如今,无人机在各行各业被普遍的应用,被普遍的用于军事,农业,民用等各个行业。四旋翼的无人机的使用更为普遍,本文主要对基于智能算法的四旋翼无人机系统设计和验证实验,计算和设计四旋翼无人机的数学模型,根据四元数和欧拉角进行姿态解算,无人机传感器数据的融合,硬件模块的选型和调试实验,软件模块的编写和调试。并对PID算法,串级PID和模糊自整定PID算法在四旋翼无人机上的控制效果进行仿真实验,在Matlab/Simulink中实现对三种PID控制的仿真,并加以对比,在无人机实验平台上对PID控制算法进行实验。
关键词:四旋翼无人机;姿态解算;PID算法;Matlab/Simulink
Design of UAV Flight Control System Based on Intelligent Algorithm
ABSTRACT
Today, drones are widely used in various industries and are widely used in military, agricultural, civil and other industries. Especially the quadrotor UAV is widely used. This paper mainly designs and verifies the quadrotor UAV system. The mathematical model of the quadrotor UAV is based on the quaternion Euler angle to the quadrotor UAV. Perform posture calculation. Fusion of sensor data, selection and testing of hardware modules, design and debugging of software modules. The PID algorithm, cascade PID and fuzzy self-tuning PID algorithm are compared with the control effect of the UAV system. The PID control of the UAV system is realized in Matlab/Simulink simulation, and the PID algorithm is applied on the UAV experimental platform. authenticating.
Key words:Quadrotor UAV; attitude solution; PID algorithm;Matlab/Simulink
目 录
第一章 绪论 1
1.1研究背景和意义 1
1.2国内外研究现状及发展趋势 2
第二章 四旋翼无人机建模及其姿态解算 3
2.1 四旋翼无人机的飞行原理解析 3
2.2 四旋翼无人机动力学模型 6
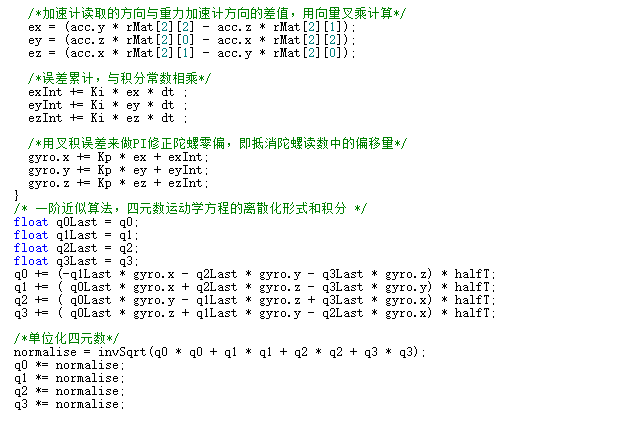
2.3 四旋翼无人机的姿态解算 9
2.3.1四旋翼无人机姿态解算的基本概念和表示方法 9
2.3.2姿态解算 10
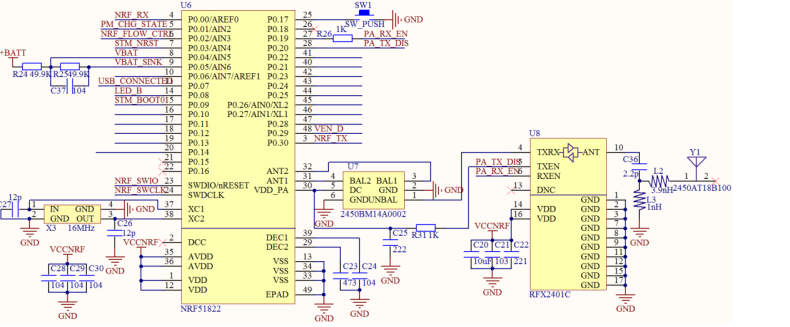
第三章 四旋翼无人机系统的硬件资源 11
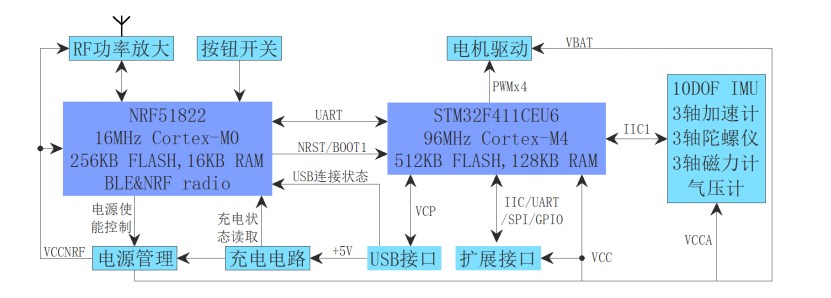
3.1 四旋翼无人机硬件的系统框图 11
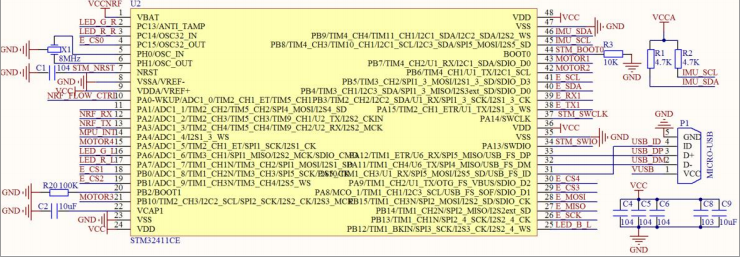
3.2 四旋翼无人机飞控系统的主控MCU 13
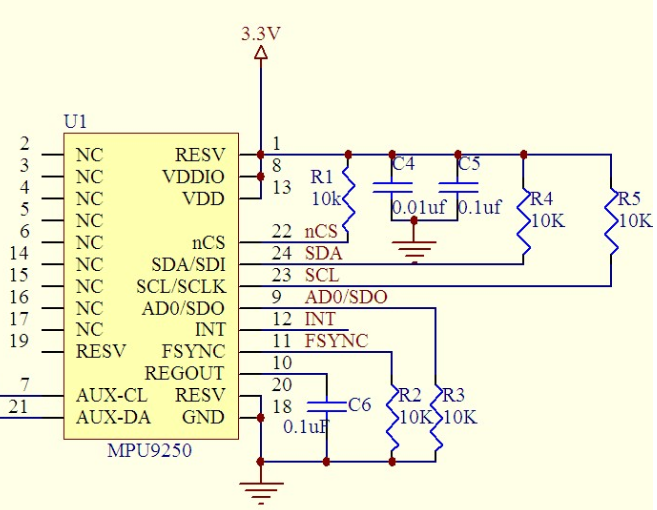
3.3 四旋翼无人机传感器模块 13
3.3.1 九轴传感器MPU9250 13
3.3.2气压传感器BMP280 14
3.4四旋翼无人机无线通信模块 15
3.5四旋翼无人机电机 16
3.6四旋翼无人机的LED 17
第四章 四旋翼无人机系统的主要软件设计 17
4.1 四旋翼无人机系统软件的总体方案 17
4.2 四旋翼无人机系统姿态解算的软件设计 18
4.3 四旋翼无人机系统控制律的软件设计 19
4.4 四旋翼无人机系统的电机控制的软件设计 21
第五章 四旋翼无人机系统控制律设计,比较和仿真 22
5.1四旋翼无人机PID控制 22
5.1.1 PID理论 22
5.1.2 基于PID控制的四旋翼无人机系统Matlab/Simulink仿真 23
5.2四旋翼无人机串级PID控制 25
5.2.1 串级PID控制 25
5.2.2 基于串级PID控制四旋翼无人机系统Matlab/Simulink仿真 26
5.3四旋翼无人机模糊PID控制 29
5.3.1 模糊PID控制 29
5.3.2 模糊PID控制器结构设计 30
5.3.3 模糊PID控制器模糊规则制定 30
5.3.4 基于模糊PID控制四旋翼无人机系统Matlab/Simulink仿真 32
5.4四旋翼无人机串级模糊PID控制 34
5.4.1 串级模糊PID控制 34
5.4.2 串级模糊PID控制四旋翼无人机系统Matlab/Simulink仿真 34
第六章 四旋翼无人机实际飞行控制效果实验 37
6.1 四旋翼无人机控制系统实际飞行控制效果 37
第七章 总结和展望 39
7.1 总结 39
7.2 展望 40
致谢 41
参考文献 42
- 绪论
1.1研究的背景和意义
操作人员通过无线电控制飞行器飞行状态或者可以自主控制飞行的可自行起降的不载人的飞机,称之为无人机。通过控制电机的输出的大小关系实现飞行器的往左,往右,往前,往后起飞,上升,降落,逆时针旋转飞行,顺时针旋转。运动灵活,便于维修,结果简单等优点被已经被国内外广泛的研究,并且普遍的应用于民用和军用等各个领域。
四旋翼无人机是一种特殊无人机,机身为十字架的形状,无人机的机身的四个顶点上面分别对称固定着4个旋翼和电机。是一个4个输入,但是却有6个自由度的系统。可以通过四个电机的输出改变无人机的运动轨迹和姿势,可以实现悬停、飞行、起降。四旋翼的无人机是具有4个输入力(电机输出)和6个坐标输出(无人机3个姿态角和3个方向)的欠驱动动力学的无人机系统。可以改变4个电机的输出控制整个无人机系统的飞行状态和飞行轨迹,和传统的无人机无法改变倾斜角不同,由于无人机的旋翼都被固定在四个顶点上,它们的倾斜角固定,动力学特性得到优化,结构也得到优化。更加方便和简化对无人机系统的操控。
具备易操控,性能好等特点的四旋翼无人机被各行各业所需要。具有广泛的军事,民用的前景。在军事方面,四旋翼无人直升机可以在情况复杂的野外和密集的城市区域实现低速低空的飞行进行战场的探测,甚至可以携带炸药作为小型的攻击武器,进行对地的攻击。也超低空的飞行,增加了很大的隐蔽性能,更好的规避敌人的发现。可以应用于边境的巡逻勘测,复杂区域的侦察,近距离的空中支援。对危险区域进行深入探测勘察,如生化区,无人区等。在民用方面,用于各种用途的监控,探测,测绘。如可用于重大灾害后的灾情探测、人员搜救,交通道路探测,森林火情探测等等;可用于不便到达的地方进行情况的勘察,大桥,水利,高压电线架的检查;还可以用于旅行的航拍,特殊场合的高空视频录制。
四旋翼无人机凭借它的优秀的功能和独特的结构特点使其对各国的科研人员具有极大的吸引力,因此针对无人机系统最重要的控制系统的设计和调试就有了重大研究的意义。
1.2国内外研究现状及发展趋势
四旋翼无人机系统从出现到现在已经取得了长足的进步,无人机控制系统的基本要求有:完成各种各样的飞行姿态、实现自主飞行和地面远程遥控操作,并可以在无人机上面搭载所需要的模块,例如:地面遥感模块,摄影模块,红外传感模块,军事装备武器系统模块等等。
在第一次世界大战中就出现了最早的无人机,人们通过地面无线电遥控的方式控制飞机,成为了最早出现的无人机。随后开始了漫长的发展的道路,而在美国的越南战争中,无人机开始被适用于地面的侦察。
无人机的发展被现代战争推动,无人机具有零伤害,成本低等特点,可以广泛的应用于战场可以进行战场的探测侦察,甚至可以携带炸药作为小型的攻击武器,进行对地的攻击。超低空的飞行的特点,增加了很大的隐蔽性能,更好的规避敌人的发现。巡逻勘测,复杂区域的侦察,空中支援。可以对危险区域进行深入探测侦察。还可以进行信息干扰对抗,信息支持保障等任务。著名的军用无人机如:美军的“沙漠鹰”无人机,可以给地面部队提供良好的视角,提供清晰的地面鸟瞰图。以色列航空工业公司的“苍鹭”无人机,主要用于边界的巡逻,巡逻的最高的飞行高度可以达到3万英尺,续航能力可以达到52个小时。通用原子航空系统的MQ-1“捕食者”,搭载攻击杀伤武器,具有侦察和袭击功能,最大的作战半径可以达到400海里,可以悬停20个小时。同为通用航空的MQ-9“收割者”,体型为上代无人机的两倍之大,可以在5000英尺的高空中停留侦察24个小时,还携带大规模的攻击武器。被美军认为是当代最有效的打击武器之一。诺斯罗普·格鲁门公司的MQ-5“猎人”,它的的翼展可以达到34英尺,高度可以达到1.8万英尺,飞行的时间可以达到18个小时。还有RQ-4“全球鹰”,它有着130英尺的翼展,飞行的高度可以达到6.5万英尺,飞行的时间可以达到36个小时。带着电子光学,红外和雷达传感器,更加的智能化,可以实现更大范围更持久的侦察和监视。
我国军用无人机这几年已经取得了长足的进步,有“彩虹”,“翼龙”系列的无人机,完全由中国自主研发,并已经装备部队。并且中国的无人机开始出口到国外,走到了各个国家。虽然我国的发展水平和先进的水平还有很大差距,但是要承认的是我国军用无人机的前景十分的光明。
民用无人机,特别是四旋翼无人机,已经被各个国家和高校进行研究,并开展了很多的科研项目。主要对无人机的系统模型,智能控制律的研究和基于无人机开展的任务的研究。
麻省理工大学项目小组对无人机在室内,GPS不能覆盖的区域中进行无人机的研究。为了完成无人机没有明确定位的条件下,还能对无人机进行姿态和飞行轨迹的控制。该研究还使用IMU和激光扫描室内的环境,并进行成像。对室内3D成像,并最终完成无GPS的自主飞行控制。完成了在室内绘制地图,定点和避障的无人机操作系统。可以用于危险地区的救援工作。
德国的MICRODRONES公司推出的一款四旋翼无人机系统,使用高性能的锂电池供电,整个系统的耗电量特别低。此无人机系统搭载GPS模块和摄像头模块,可以进行室内的航拍。
Micropilot推出的无人机系统MP2128Heli是现有的最小的自动驾驶仪的产品。该产品可以实现全数字控制的方式控制姿态稳定,飞行轨迹的确认和搭载设备的管理。并且具备着重量轻,体积小,方便调试等优点。可以完成自动飞行起降。
全俄中央科学技术公司设计的STA3X飞控系统,可以进行二次开发,可以对参数进行设置和对控制律的实现,减少产品研发的周期和成本。可以对控制策略的设计,可以满足对控制律研究的要求。此飞控上还集成了飞行姿态轨迹控制系统,数据采集处理系统,控制律系统等,功能十分的强大。
而国内高等院校的研究,则着重于对理论和控制算法的验证。但是仿真的效果并没有达到特别理想的效果。
在2004年国防科技大学开始研究四旋翼无人机,并设计出了一款微型的四旋翼无人机,重量为750g,最大长度为70cm,飞行控制性能比较稳定。
- 四旋翼无人机建模及其姿态解算
2.1四旋翼无人机的飞行原理解析
无人机改变四个电机功率带动桨叶的转动输出,使系统快速的响应,完成起飞降落等任务,分别控制4个电机的功率输出动力完成控制四旋翼无人机的的位置和姿态的实现。实现前,后,左,右,起飞,降落,绕着z轴逆时针旋转,绕着z轴顺时针旋转,对四旋翼无人机的数学模型进行推理演算。
控制四个电机能够产生不同的输出控制飞行器的姿态和位置,因此不同的电机转动方式能够达到不同的飞行效果。因此可以分析其中的飞行原理。
- 垂直的上升和降落。当无人机在空间中实现自稳并能保持后,M1,M2,M3,M4电机同时增大输出,无人机能够实现垂直上升,如图2.1。而当M1,M2,M3,M4电机同时减少输出,无人机能够实现垂直下降,如图2.2。
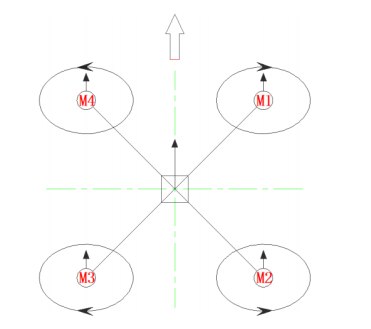
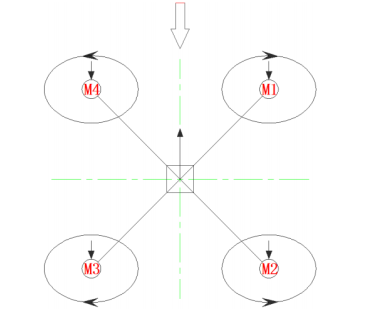
图2.1 垂直上升 图2.2垂直下降
- 向前和向后飞行。当无人机在空间实现自稳并保持稳定后,电机M2,M3输出增大,M1,M4输出减小或者不变,无人机可以完成向前飞行的动作。反之,当电机M1,M4的输出增大,M2,M3的输出减少或者不变时,无人机可以完成向后飞行的动作。
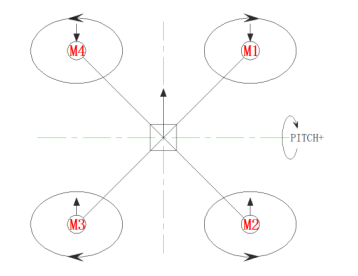
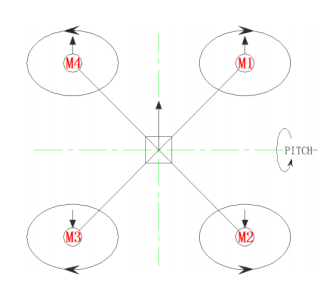
图2.3向前运动 图2.4向后运动
- 向左和向右飞行。当无人机在空间实现自稳并保持稳定后,电机M1,M2输出增大,M3,M4输出减小或者不变,无人机可以完成向左飞行动作。反之,当电机M3,M4的输出增大,M1,M2的输出减少或者不变时,四旋翼无人机可以完成向右飞行动作。
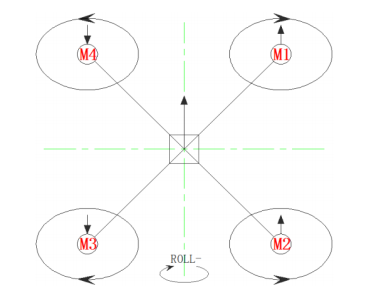
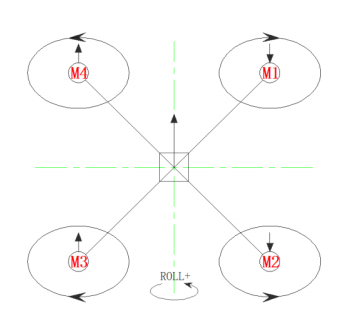
图2.5向左飞行 图2.6向右飞行
- 无人机绕着z逆时针改变航向和绕着z顺时针改变航向。当无人机在空间实现自稳并保持稳定后,电机M2,M4输出增大,M1,M3输出减小或者不变,由于电机会产生逆时针的扭矩,机体产生顺时针的反扭矩。无人机实现顺时针改变航向角动作,如图2.7。反之,无人机可以实现逆时针改变航向动作,当电机M1,M3的输出增大,M2,M4的输出减少或者不变时,四旋翼无人机可以实现逆时针改变航向,如图2.8。
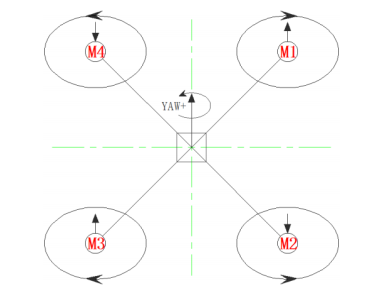

图2.7顺时针改变航向 图2.8逆时针改变航向
2.2四旋翼无人机动力学模型
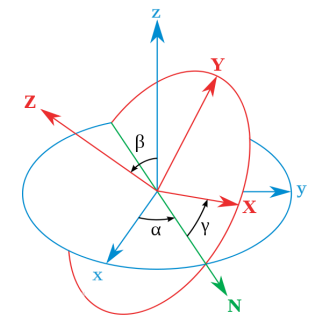
四旋翼无人机飞行的姿态角,飞行的速率,方向是基于坐标系提出来的概念。可以确定两个坐标系,一个为地面坐标系E系(OXYZ),一个为机体坐标系B系(oxyz)。认为无人机的地面坐标系和机体坐标系之间的的转换方程为:
 (2.1)
(2.1)
此时的 为地面坐标系和无人机体坐标系之间的转化矩阵。
为地面坐标系和无人机体坐标系之间的转化矩阵。
 (2.2)
(2.2)
2.2公式中 为无人机运动的横滚角,
为无人机运动的横滚角, 为运动的俯仰角,
为运动的俯仰角, 为运动的偏航角。
为运动的偏航角。
将四旋翼无人机视作一个具有六个自由度的系统,包括上下,左右及前后运动,以及机体的偏航,俯仰,滚转三个角运动。根据牛顿第二定律,可以建立动力学的关系方程:
 (2.3)
(2.3)
 (2.4)
(2.4)
 为作用在无人机上所以的外力和。
为作用在无人机上所以的外力和。
 为无人机的质心速度。
为无人机的质心速度。
 对某定轴的合外力矩
对某定轴的合外力矩
 为无人机的质量
为无人机的质量
 四旋翼无人机位于地面坐标系的动量矩
四旋翼无人机位于地面坐标系的动量矩
把四个电机总输出的力定义为T,在无人机机体坐标系B系中所受的升力是垂直于无人机机体平面向上的。定义为 。
。
此时
 (2.5)
(2.5)
化简为 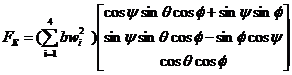 (2.6)
(2.6)
根据牛顿第二定律和四旋翼无人机的动力学方程建立方程,无人机系统在地面下的位移的关系为
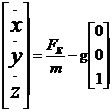 (2.7)
(2.7)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: