固体波动陀螺半球谐振子的频差参数测量毕业论文
2020-02-19 19:02:39
摘 要
半球谐振陀螺(Hemispherical Resonator Gyroscope,HRG)具有的优点包括:工作时长长、准确性高、抗干扰能力强、噪声低、技术性高、过载条件下工作稳定、准备时间短,抗电离干扰能力强。因此在长寿命惯性导航的研发与应用中扮演着重要的角色。半球谐振子是半球谐振陀螺正常工作的核心元件,其中频差是评价其加工及工作性能的重要评价参数之一。
论文基于本科阶段所学知识,查阅相关的文献资料,从学习半球谐振陀螺的工作机理开始,对频差的意义、测量系统的搭建、数据的后处理及误差分析等方面展开。其中对测量系统搭建所选仪器的种类及参数进行了说明,最后给出测量结果,误差分析与抑制方案的设计。
论文主要研究了固体波动陀螺半球谐振子的频差参数在基础学生实验条件下的测量方案设计与误差抑制方案的选取。比较了国内目前采用较多的十六电极测量方案与双激励电极双位移传感器测量方案的优劣,并对双激励电极双位移传感器法在较为简陋的实验条件下的实现进行了简化。通过实践证明双激励电极双位移传感器测量法在学生实验条件下的可行性。研究了固体波动陀螺力反馈控制模式下,通过电路补偿控制谐振子振动位移分量来抑制频差的方法。
本文的特色:简化了频差参数的测量方法,证明在较为简陋的实验条件下对半球谐振子的精度进行分析是可行的。
关键词:半球谐振陀螺仪;半球谐振子;频差参数;误差抑制;谐振子平衡
Abstract
Hemispherical resonant gyroscope (HRG) has many advantages, such as long life, high precision, high stability, low noise, low power consumption andradiation resistance, which make it have great application prospects in long life inertial navigation. Hemispherical resonator is the key component of hemispherical resonator gyroscope, and frequency difference is one of the important parameters to evaluate its processing and performance.
Based on the knowledge of undergraduate course, consulting relevant literature, starting with the understanding of the working principle of hemispheric resonant gyroscope, the significance of frequency difference, the construction of measurement system, data post-processing and error analysis are carried out in this paper. The types and parameters of the instruments selected for the construction of the measurement system are explained. Finally, the measurement results, error analysis and the design of the suppression scheme are given.
This paper mainly studies the design of measurement scheme and the selection of error suppression scheme for the frequency difference parameters of hemispheric harmonic oscillator of solid wave gyroscope under the experimental conditions of basic students. The advantages and disadvantages of the current 16-electrode measurement scheme and the dual-excitation-electrode displacement sensor measurement scheme in China are compared, and the realization of the dual-excitation-electrode displacement sensor method under relatively simple experimental conditions is simplified. Practice has proved the feasibility of the measurement method of double excitation electrode and double displacement sensor under the experimental conditions of students. The method of restraining non-uniform density error by controlling different vibration displacement components of harmonic oscillator with different control modes under HRG force feedback control mode is studied.
The characteristic of this paper is that it simplifies the measurement method of frequency difference parameters and proves that it is feasible to analyze the accuracy of hemispheric harmonic oscillator under relatively simple experimental conditions.
Key Words:Hemispherical Resonator Gyroscope; Hemispherical Resonator; Frequency Difference Parameters; Error Suppression; Harmonic Oscillator Balance
目 录
第1章 绪论 1
1.1 课题研究背景与意义 1
1.2 国内外研究状况 1
1.3论文组织结构 2
第2章 半球谐振子理论基础研究 4
2.1 半球谐振子基本工作原理 4
2.2 频差的定义与来源 4
2.2.1密度不均匀引起的频率裂解 5
2.2.2弹性模量不匀引起的频率裂解 5
2.2.3谐振子半径不匀引起的频率裂解 6
2.3本章小结 6
第3章 方案设计与比较 7
3.1 十六电极测试法 7
3.2 双激励电极双位移传感器测试法 8
3.3 本章小结 9
第4章 测量试验台的搭建 10
4.1 振动信号拾取装置 10
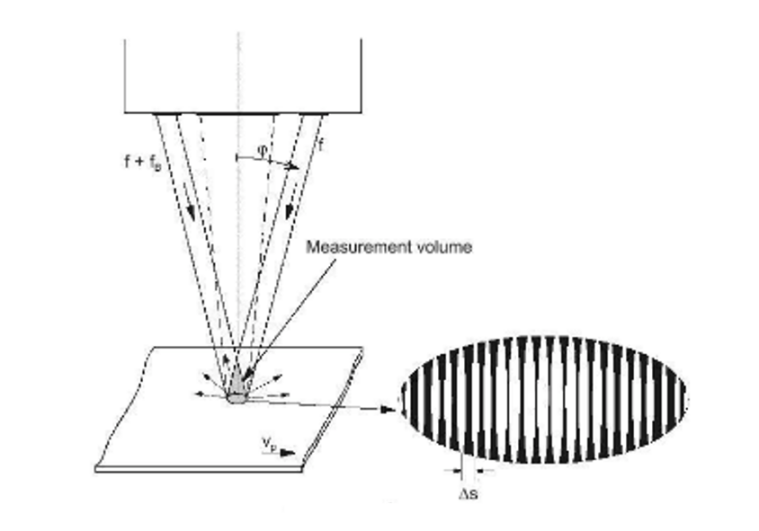
4.1.1激光多普勒干涉仪基本原理 10
4.1.2自由空间型单点激光多普勒测振仪 11
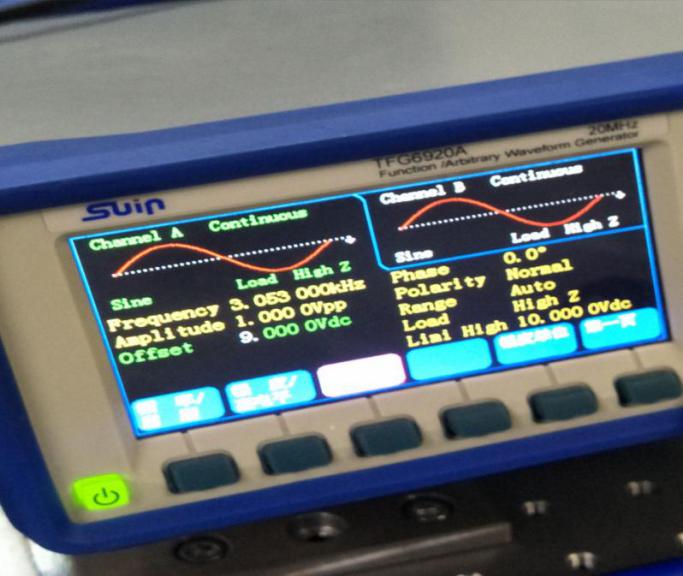
4.2 振动信号发生装置 13
4.2.1 TFG6920A型信号发生器 13
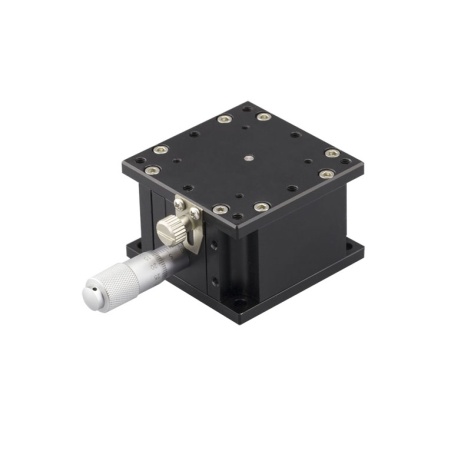
4.3 陀螺仪定位微调装置 14
4.4 陀螺仪工作状态模拟系统 15
4.4.1 定位基座模拟与微动误差消除 16
4.4.2 激励环与数据采集环设计 16
4.5 本章小结 18
第5章 基于MATLAB的数据后处理 20
5.1 MATLAB简介 20
5.2 幅值时间曲线的绘制 20
5.3 频差的计算 22
5.4误差分析与小结 22
第6章 谐振子误差抑制 23
第7章 总结与展望 24
参考文献 26
致谢 28
第1章 绪论
1.1 课题研究背景与意义
最初代的陀螺仪器,被用作航海过程中的方位指示,与陀螺仪技术同步发展的不仅仅是陀螺仪的精度,也是陀螺仪的应用广度。而后的陀螺仪器不仅服役于航海事业,在更高机动性的航空和航天事业中也拥有一席之地。
随着在轨卫星工程的发展,卫星的实际应用寿命被要求在为8至15年以上,而个别高轨卫星至少要求工作时长达到15至20年,其中的佼佼者——美国陆地卫星LANDSAT.5的表现甚至到达了25年,我们可以看到,人们对惯导系统工作时长的要求在不断提高。为了在满足惯导系统长寿命要求的同时,进一步解决传统陀螺仪器因支架系统中轴承与导电装置的摩擦等原因引起的漂移,研究脱离机械转子的非传统意义的新型陀螺仪,成为了业内的热门话题。其中,固体波动陀螺作为一类新型陀螺因其自身具工作时长长、准确性高、过载条件下工作稳定、抗电离干扰能力强等优势而成为了惯性导航领域倍受青睐的陀螺仪之一。为了能让固体波动陀螺更好地应用于导航、制导与控制系统中,我们不能够让其精度成为掣肘控制系统性能的因素。因此对固体波动陀螺进行研究是有发展前景和应用前景的。
除以上提及的优点之外,固体波动陀螺敏感角位移和角速度的方法主要依赖于半球谐振子唇沿高频振动产生的哥氏效应,这意味着采用固体波动陀螺就消除了由于机械摩擦引起的陀螺仪漂移。因此,在航空航天领域设立项目开展对固体波动陀螺尤其是其核心器件的半球谐振子的研究是有必要的,除此之外,出于经济效益方面的考虑,提高电子消费品的精度符合消费者的消费理念和消费需求,相信更加深入的研究与试验后,可以为未来开拓更广阔的市场打下良好的基础。
1.2 国内外研究状况
自二十世纪中叶起,一些行业领先的国家就逐渐开展了固体波动陀螺的相关研发工作。
美国不仅仅是世界上最早研究固体波动陀螺的国家,而且其研究水平一直在世界上保持着领先。1965 年起,美国的 Delco 公司就开始致力于的半球谐振陀螺的研发而且成果显著。在大多数国家还仍处于启蒙阶段的时候,便以迅雷不及掩耳之速申请了半球谐振陀螺的专利授权,而后其实际应用被用于美国的某些实际飞行器并且其中的某一部分在今天仍处于工作状态中,较为完美的实现了在当时的绝大多数国家都无法实现的导航功能并且保持在较长的时间内无故障运行[6]。美国学者对其理论研究也从未止步。1971年美国学者Saunders与Paslan Lee等利用Rayleigh-Ritz法分析了圆柱形薄壳的自由振动,并将分析结果与模型测试结果及有限元分析结果进行了比较开始。Shatalov等对振动陀螺的振动特性进行了分析,以此为代表,美国在该领域的研究成果如同雨后春笋一般快速增长。
俄罗斯(当时前苏联的科研成果而后大多由俄罗斯继承,故统一以俄罗斯代称)在固体波动陀螺理论研究方面的贡献可谓是世界之最。1985年,前苏联科学出版社出版了由Журавлев В. Ф.和Климов Д. М.所著的《固体波动陀螺》,此书详细介绍了把环形陀螺仪外圆上某一质点动力学方程的建立及在此基础上质点振动位移的求解方法,为世界上大多数后起步国家的研究提供了重要的参考。
目前国内自由学者一般选用的学习教材为俄国学者Матвеев В. А.及其学生等著的《固体波动陀螺》的译文本,此书系统的阐述了固体波动陀螺与环形陀螺仪的振动原理,利用应力应变函数关系建立了半球谐振子及环形谐振子的动力学方程。书中还给出了半球谐振子与环形谐振子振动振型的进动因子的表达式,但没有给出具体的推导过程。
自1983年《外国海军导弹动态》期刊上发表了一篇介绍HRG的文章开始,以北京航空航天大学、哈尔滨工业大学为代表的多所国内高校展开了对固体波动陀螺的理论研究。二十一世纪初期,国内成功研制出了可应用与实践的半球谐振陀螺仪样机,这是中国半球谐振陀螺研究历史上具有里程碑意义的成功典范,而后国内各大企业、研究所对半球谐振陀螺的应用研究逐渐步入正轨,对半球谐振陀螺的传感检测、加工工艺、误差抑制等进行了广泛研究。
1.3论文组织结构
本论文探索固体波动陀螺半球谐振子的频差参数测量大体上经过文献调研、方案设计、方案修改、试验台搭建、实际测量、数据处理与结果分析几个方面展开。
全文共分为七章,各个章节安排如下:
第一章,说明半球谐振陀螺的研究背景与实际应用意义,介绍国内外科研机构对半球谐振陀螺的研发程度和功能开发,并且对课题的主角——谐振子的研究内容和研究意义进行详细的阐述。
第二章,对半球谐振子机械结构进行说明,通过合适的建模、理论分析和公式推导说明频差产生的原因。
第三章,选取适当的测量方案,对不同方案进行比较并最终选取可执行性最高的方案。
第四章,选取合适的仪器,设计相关硬件,完成试验台的理论搭建。
第五章,实验过程记录与数据处理。
第六章,根据文献调研与实际执行过程,针对半球谐振陀螺在实际工作中的局限之处提出合适的误差补偿方案。
第七章,对本课题所展开工作和已取得的成果进行总结与展望
第2章 半球谐振子理论基础研究
2.1 半球谐振子基本工作原理
半球谐振陀螺的陀螺.效应是通过谐振子中的径.向驻.波在外界激.励条件下的哥氏.效应引起振.型的进.动来实现的[6]。驻.波相对于.谐振子的进.动效果如图2.1所示,激励电极通电与半球谐振子形成一个环形均匀电磁场,电场力给谐振子一个速度使得谐振子开始振动。当陀螺基座静止时,驻波的波形保持不变;若基.座旋.转,则驻波发生进.动,进动角与旋转角成正比且比例系数为常值,该数值仅与谐振.子本身有关[19] 。通过检测谐振子波形的进动状态,就可以通过数学解算得到基座的运动状态,所以在实际操作过程之,只要保持基座稳定,就可以实现角位移或角速率的测量。
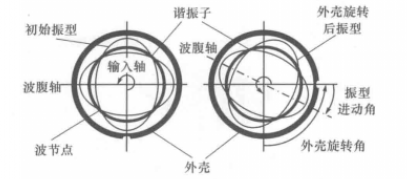
图2.1 半球谐振陀螺工作原理示意图
2.2 频差的定义与来源
半球谐振子材.料的密.度、弹性模.量和壳体的厚.度等参数不均.匀性的傅里.叶展开式的一.次、二.次、三.次、五.次谐波对谐振子的驻波波形的影响极小,可以忽略不计,但半球谐振子的进动特性会因四次谐波的存在而产生实质影响[11]。工艺过程不能达到理想状态引起的四次谐波造成了谐.振子存在两个固有轴.系,这两个轴.系互成45°,谐振子的.沿着两个轴的振动.都分别有极.大值和极.小值。固有频率的极.大值和极小值叫之间的频.率差称为频率裂解。
由文献[2]我们得知,在陀螺仪中,对于谐振子来说,当输入一个角速度时,哥氏力会给予谐振子一个速度,从而导致谐振子振型的变化。同样的,反过来我们可以通过测量振型的变化,对测量结果进行数学解算,进而实现角速度的测量,若对结果再进行积分,则得到角位移的变化。所以对半球谐振陀螺仪的建模分析主要是对谐振子的分析。
由文献[4]我们得知,目前对于谐振子的数学建模大多是基于基希霍夫-李雅夫假设的,此假设的内容是:谐振子的振动看作一种仅发生在唇沿位置的弹性振动,任何垂直于壳体中间表面的直线在形变前后仍然垂直;变形过程中壳体保持厚度不变,这就意味着沿壳体厚度的法线段长度为定值;在相邻的平行于中间.表.面的薄.壳层表面.间产生的法.向应.力与应.力张量的其他分.量相比是小.量,可以忽略不计。
2.2.1密度不均匀引起的频率裂解
对固体波动陀螺半球谐振子驻波的幅频特性影响最明显的是诸如谐振子密度、材料的弹性模量、谐振子的半径等参数的不均匀性的Fourier展开式的第四次谐波。因此在实际分析过程中仅保留密度的Fourier展开式的四次分量,密度表示为:
(2.1)
其频率裂解可以表示为:
(2.2)
其中为理想状态下的固有频率。由公式(2.2)我们可以得到如下结论:由密度不均匀的四次谐波引起的频率裂解和对应偏差呈线性相关。因为谐振子的第一、第二、第三次谐波的相关偏差值一般较小,一般忽略不计,而由四次谐波引起的频率裂解更为主要。
2.2.2弹性模量不匀引起的频率裂解
为了研宄杨.氏模量不均匀引起的频率裂.解,假设谐振子的加工的缺陷之处仅在于谐振子材料的杨氏.模量,设其与圆周角存在的函数关系为:
(2.3)
其中代表谐振子平均弹性模量按四次谐波的偏差的相对值。
其频率裂解可以表示为:
(2.4)
将式(2.4)带入谐振.子的二阶固.有.振型的动力.学方.程组,用平均法解得,驻波的角速.度公式为:
(2.5)
所以,由密度不.均匀引起的角速.度的漂.移为。
2.2.3谐振子半径不匀引起的频率裂解
为了研宄谐振子半.径不均.匀引起的频.率裂.解,假设谐振子的加工缺陷在于谐振子半径随圆周角变化,半径R()可以表示为:
(2.6)
其中代表谐振子平均半径按四次谐波的偏差的相对值的变化。
其频.率裂解可以表示为:
(2.7)
将式(2.7)带入谐振子的二阶.固有振型的动.力学方.程组,用平均法解得,驻波的角.速度公式为:
(2.8)
根据上式可以得到,由密度不.均匀引起的.角速度.的漂移为。
2.3本章小结
在本章,首先我详细介绍了半球谐振陀螺的工作原理,然后在用基希霍夫谐振子模型的基础上并且剖析了由谐振子的密度、杨氏模量模量、唇沿半径在实际加工过程中的工艺缺陷引起的半球谐振子的二阶模态的频差和角度漂移,并且通过推导得出了相应的频差参数计算公式。
第3章 方案设计与比较
3.1 十六电极测试法
半球谐振陀螺的结构如图3.1所示,其主要构成器件为施力电极、半球谐振子、检测器[15]。一般来说这三部分均由表面进行过金属化处理的品质因数较高的熔融石英经过精密加工而成。其中检测器包括拾取电极与读出基座,施力电极由激励罩供电,检测器作信号拾取。将上述器件组合在一起提供一个高真空环境,就形成了半球谐振陀螺[11]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: