多传感器辅助泊车系统设计毕业论文
2020-02-19 19:03:24
摘 要
由于汽车行业的飞速发展,汽车保有量不断增加,这使得道路、停车场越来越拥挤,泊车环境不乐观,而且驾驶经验缺乏的新手驾驶员数量也在不断增长,导致泊车事故越来越频繁,因此自动泊车系统越来越成为人们热点关注的研究问题。而现有的泊车系统大多采用超声波传感器作为车辆的“眼睛”,精度不能很好满足泊车需要。本文通过分析自动泊车过程中车辆运动学模型,实现了通过多个激光雷达扫描检测环境,利用软件设计算法融合激光雷达信息,进而识别车位信息,来实现路径规划,达到自动泊车辅助系统功能。试验表明,该系统能很好的检测环境、识别车位,在环境地图中建立泊车路径,并通过控制方向盘转角实现泊车。
本文首先对车辆的运动学模型进行了分析,在此基础上分析推导三段式圆弧-斜直线-圆弧的轨迹,完成了泊车路径的规划。然后选用两个激光雷达测距传感器进行环境扫描,通过对激光雷达进行标定和数据融合,得到了较为清晰的环境地图,在此条件下能够较精确地检测到可泊车位,为路径规划提供条件。最后,利用旋转编码器测得方向盘转角,实现对车辆转向控制,按路径轨迹调整方向盘,以达到泊车入位目的。
关键词:泊车辅助系统;激光雷达;路径规划;多传感器
Abstract
Due to the rapid development of the automobile industry, the number of car ownership is increasing, which makes roads and parking lots more and more crowded, the parking environment is not optimistic, and the number of novice drivers lacking driving experience is also growing, resulting in parking accidents. The more frequent, the more automatic parking systems are becoming a hot research issue. Most of the existing parking systems use ultrasonic sensors as the "eyes" of the vehicle, and the accuracy is not well enough to meet the parking needs. By analyzing the vehicle kinematics model during the automatic parking process, this paper realizes the detection environment through multiple laser radars, and uses the software design algorithm to fuse the lidar information to identify the parking space information to realize the path planning and achieve the function of the automatic parking assist system. . Tests show that the system can detect the environment well, identify the parking space, establish a parking path in the environment map, and realize parking by controlling the steering wheel angle.
In this paper, the kinematics model of the vehicle is analyzed firstly. On this basis, the trajectory of the three-section arc-oblique line-arc is derived and the planning of the parking path is completed. Then two laser radar ranging sensors are selected for environmental scanning. By calibrating and data fusion of the laser radar, a clear environmental map is obtained. Under this condition, the parking spaces can be detected more accurately, which provides conditions for path planning. . Finally, the steering wheel angle is measured by a rotary encoder to realize the steering control of the vehicle, and the steering wheel is adjusted according to the path trajectory to achieve the purpose of parking.
Key Words:Parking assist system;Lidar;route plan;Multi-sensor
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 自动泊车辅助系统组成及原理 1
1.3 国内外研究现状 2
1.4 研究内容 4
第2章 车辆运动学模型的建立与泊车路径规划分析 7
2.1 模型简化 7
2.2 Ackerman转向原理分析 7
2.3 车辆运动学模型 8
2.4 车辆避碰 11
2.5 初始车辆位姿识别与调整 13
2.5.1 判断车身位姿 13
2.5.2 调整位姿 14
2.6 一次泊车入位车位计算及设定 15
2.7 多次泊车入位路径规划分析 16
2.7.1 车辆在最终目标位置关键点坐标的计算 16
2.7.2 车辆各个关键点的实时坐标 18
2.8 泊车路径规划 19
第3章 基于激光雷达传感器的周围感知 22
3.1 激光雷达的介绍 22
3.1.1 激光雷达工作原理 24
3.1.2 激光雷达测试性能特点 26
3.2 激光雷达的安装与标定 27
3.2.1 激光雷达的安装设置 27
3.2.2 激光雷达的标定 28
第4章 泊车辅助系统硬件及软件设计 31
4.1 基于激光雷达的环境感知系统 31
4.1.1 环境感知系统功能设计 31
4.1.2 编译环境 31
4.1.3 环境感知界面设计 32
4.2 获取方向盘转角数据 33
4.2.1 方向盘转角与前轮中心转角关系 33
4.2.2 基于旋转编码器的模拟方向盘 34
4.3 系统试验分析 35
4.3.1 车位检测试验 35
4.3.2 泊车路径试验 37
第5章 全文总结与展望 38
5.1 全文工作总结 38
5.2 展望 38
参考文献 39
致 谢 44
绪论
研究背景及意义
近年来,我国汽车工业快速发展、人民生活质量不断提高,汽车数量迅速增加。与此同时我国基础设施建设程度与汽车数量增长速度之间的不平衡,投入使用的汽车数量飞速增长使得道路和停车场变得拥挤不堪,这导致的显著问题之一就是泊车难。通过对因泊车产生的交通事故原因进行分析和日常生活中对泊车入位经验的积累,泊车难点主要包括:存在驾驶员视野盲区,影响判断;驾驶员操纵车辆多次泊车入位移动容错率低;同时受车位空间影响,局限性大。
驾驶员在倒车过程中,视野受限,一般仅能通过车辆左右两侧后视镜观察到车辆周边的环境信息,同时还留意车辆和周边障碍物(包括移动的物体)的实时相对距离;控制好车辆的速度和启停使车辆平稳安全地避开障碍物;最重要的是控制车辆的方向盘转角,并根据车辆的位置状态实时调整方向盘角度。将所有上述方面考虑进去后加上驾驶员自身的经验,才能够无差错的完成泊车。
繁杂的泊车操作过程和当今泊车环境复杂程度,使得消费者对自动泊车辅助系统的需求越来越急迫,在汽车工业向电气化,智能化和网络化整合过渡的趋势下,研发降低泊车难度、提高汽车安全性的自动泊车辅助系统具有重要意义。
自动泊车辅助系统组成及原理
现有的自动泊车辅助系统一般由环境感知模块、中央处理模块、人机交互模块和执行机构模块四个部分组成基本框图如1.1所示。
环境感知模块的主要功能是负责获取车辆周边环境信息,将通过传感器检测到的距离信息发送至中央处理模块,经过数据处理后可建立起环境地图,利用程序算法在地图中建立起车辆模型、得到障碍物位置,为车位检测提供条件,同时在泊车过程中实时检测障碍物距离信息以达到避碰预警。中央处理模块主要是接收各模块传来信号然后进行处理分析,包括接收环境信息建立障碍物地图,进行车位检测,在成功检测到合适泊车位后,进行路径规划的同时,向人机交互模块发送可泊车提示,在驾驶员确认选择泊车模式后,向执行机构发送泊车命令,在泊车过程中根据当前车辆状态生成控制策略,及时调整车辆,使车辆安全地完成泊车任务。人机交互模块主要是给驾驶员提供一个与车辆之间的交互平台,在接收到中央处理模块发出的提示信息后,通过用户界面向驾驶员显示当前车辆状态信息、车位周边障碍物信息、预规划路径及操作提示,以保证驾驶员和车辆之间的联系,确保行车安全。执行机构模块主要是负责接收来自中央处理模块发出的命令,然后控制车辆各部分机构执行,包括转向系统、制动系统和动力系统,同时将当前机构执行状态反馈回中央处理模块,以实现不脱节控制,再配合驾驶员操作,最终实现自动泊车。

图1.1 自动泊车辅助系统构成
国内外研究现状
国外对自动泊车系统的研究比国内早十多年的时间,得到的成果也较为丰硕。目前研究自动泊车辅助系统的主要有以下两大方向:
一类是基于驾驶员熟练泊车的控制算法,把驾驶员的经验做成泊车控制器,以车辆的实时移动速度和车身当前位置状态作为系统的输入,输出信号控制车辆方向盘转角以实现泊车入位。Sugeno M等利用驾驶员的泊车经验设计模糊控制器,并在模型小车上完成泊车试验[1]。林瑞焱木等在不一样的泊车场景中,通过分析设计隶属函数和控制规则时考虑泊车过程中的操纵性,模糊控制器的输入添加了车辆和车位的级向距离,输出除了转向角以外加上了速度,使得模糊控制器的控制能力和精度有所提高[2]。Zhao Y N等将里程计和多个超声波传感器的信息结合到车辆与车位的位置关系里,利用该技术设计出泊车的模糊控制器,适用于狭小泊车环境[3-4]。于伟等把遗传算法用于优化输入和输出变量的隶属度函数,在一定程度上优化了基于模糊控制的泊车轨迹[5]。杨昔阳等设计了基于变论域理论的模糊控制器,通过仿真发现该自适应控制器控制灵敏、无超调情况[6]。Ozkul等利用视觉信息研发模糊控制泊车系统,通过模糊控制算法处理摄像头的输入信息,以确定泊车过程中车身转向角和车速。李占江通过分析熟练驾驶员在三种泊车环境中经验设计模糊控制器,利用遗传算法优化了该模糊控制器的参数,并实现仿真[7]。吴冰等将泊车过程视为匀速,并设车辆初始泊车位置时方位角为零的条件下,设计基于RBF网络和神经网络的泊车控制器[8]。Zhao Liang等在四段式泊车路径轨迹跟踪中加入模糊控制技术,结果表明该方法比PID控制精度更高、更快速[9]。任坤等将机器视觉技术和驾驶员的驾驶经验相结合设计了模糊控制器用于泊车[10]。夏增辉等设计了一种以变论域理论为基础的控制效果也较为灵敏的自适应模糊控制器[11]。董航瑞将自动泊车分阶段进行分析,对每个阶段下熟练驾驶员的泊车经验转化为泊车路径,并在无模型的自适应控制下对恒定速度和变化速度的泊车状态进行仿真[12]。吴锴分四个阶段分析车辆泊车过程,采用遗传算法优化段模糊控制,仿真验证算法有效性,但没有给出每个阶段之间完成切换的方法和划分各阶段的依据[13]。
另一类是根据传感器获取环境信息得到泊车地图,在该环境下进行路径规划和轨迹跟踪控制,这一方向主要时在泊车环境几何空间中将车辆作为研究对象,建立车辆运动学模型,然后通过分析其几何关系得出相对位置、运动、碰撞等约束,利用控制算法分析车辆运动,规划路径进而控制车辆,并将车辆的实时情况反馈到系统中,对轨迹进行跟踪控制,使车辆按规划好的路径实现泊车入位。Richard M. Murray等分别研究了在开环和闭环状态下使用正弦曲线对非完整约束的泊车路径。J.A. REEDS等规划了一条将圆弧与线段平滑相接的泊车路径,并优化了车辆前进和后退过程 。Emese Sz´ adeczky-Kardoss等解释了如何根据跟踪控制器的时域级别变化遵循连续曲线路径规划,应用在装有EPAS的车辆上得到的效果很好。Demirli K等使用五阶多项式设计泊车路径来实现连续性,避免泊车过程中车辆停车原地打方向盘的情况,然后结合神经-模糊控制算法建立泊车控制器控制车辆按路径行驶,但该方法需要泊车空间较大,且多项式的选取无依据[16]。李建锋利用贝塞尔曲线设计泊车路径,用PID跟踪车辆位姿状态[17]。宋金泽等利用圆弧对平行、垂直泊车进行了分割,分区域避障,设计四阶B样条曲线,以优化泊车轨迹曲率为目标,使用非线性的方法求出B样条轨迹参数,完成平行泊车路径规划,但该方法求解时间受采样结果精度影响,需要获取高精度的时间维度采样数据才能快速求解出结果,否则实时性较差[18]。朴昌浩利用车位调节,在原有的基础路径上增加了一段圆弧来调整车辆初始位姿不平行的泊车路径[20]。丁飞采用四段式泊车路径规划,通过增加可选路径规则,无需调整车辆初始位姿,亦能满足泊车条件[22]。Hélène Vorobieva和Jong Min Kim等运用回旋曲线将几段路径拼接为平滑连续曲线,不同的车辆初始位姿,对应不同的规划路径[23-24]。黄迅使用回旋曲线平滑泊车路径,保证泊车过程的连续性,并计算出最小车位,再通过模糊控制器减少误差[25]。Zips P等利用龙格库塔法将路径离散,再通过SQP进行非线性规划,实现动态路径规划,为简化轨迹规划,在驾驶员泊车经验的基础上把泊车路径分为2部分求解[27-28]。Hélène Vorobieva等使用回旋螺线优化泊车路径曲率,并进行了实车试验,结果表明此路径可行[29]。清华大学的YangYi等基于“线性转向螺旋”曲线建立搜索平滑路径的方法优化路径规划,并使用闭环控制器处理误差,通过仿真实验证明方法有效。
以上两类方法各有优劣:
基于驾驶员熟练泊车的控制算法,把驾驶员的经验做成泊车控制器。因为不需要预先规划车辆泊车轨迹,所以可在泊车过程实时调整控制参数,以补偿系统误差,稳定性、适应性优良。但从获取大量驾驶员泊车经验数据用于生成自动泊车控制算法,是一大难题;对增加了控制器设计难度,移植到实际应用中存在一定难度。
基于传感器获取环境信息得到泊车地图,在该环境下进行路径规划和轨迹跟踪控制,根据当前车辆状态和泊车位置直接解算出最优路径规划轨迹,逻辑浅显易懂,便于应用到实际中。但是此类方法的精确度取决于泊车过程中的精确操作,若选用的轨迹跟踪控制器效果不理想,则会使得实际行驶轨迹与规划好的路径之间有很大误差。
研究内容
- 根据车辆泊车的特点,建立运动学模型,分析车辆在车位内外的运动特性,规划泊车路径;
- 通过对目前常用测距技术进行对比分析,结合激光测距方法扫描车周环境,确定初始泊车目标位置;
- 不间断扫描数据进行动态匹配,实现对车身姿态及位置的精确动态识别;
- 通过传感器获取方向盘/轮胎指向信息,并根据目标位置和当前位置进行路径规划,解算方向盘控制角度;
- 设计软硬件系统,根据自动泊车的需要设计编写软件和外围电路,编写主程序和各子模块的软件程序,并通过软件界面显示信息给用户,辅助泊车过程。
本次设计主要是要设计一个多传感器辅助泊车系统。
自动泊车辅助系统主要由以下几个部分实现功能:车位信息主要通过环境感知模块进行实时采集环境信息,然后将距离信息输送到中央控制单元,通过中央控制单元处理信息后向转向执行机构发送转向指令,从而对车轮转向进行控制,同时中央控制单元与人机交互模块相互作用,可对驾驶员给出操作提示或者将驾驶员的操作指令发送至中央控制单元,车轮转向会通过路径轨迹将位置信息反馈给环境感知模块,最终实现自动泊车。系统框图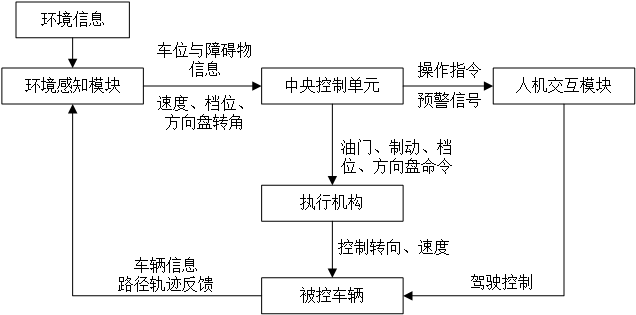 如图1.2所示。
如图1.2所示。
图1.2 自动泊车系统构架
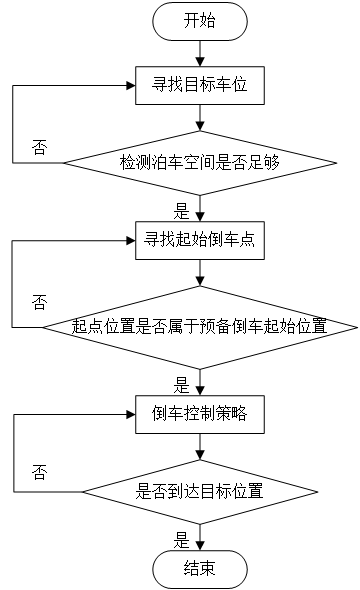
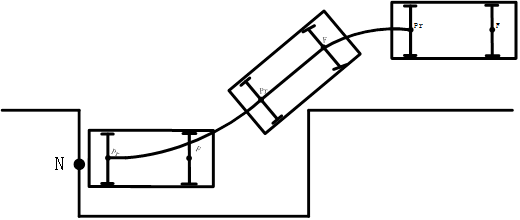
不同的泊车类型,其泊车的过程都大致相同:(1)开启泊车系统,通过传感器完成泊车位的检测;(2)进行泊车路径的规划;(3)车辆行驶到泊车的起始点区域;(4)车辆运动控制实现参考路径的跟随;(5)到达泊车目标点后完成泊车,关闭系统[43]。自动泊车系统大致流程图如下图1.3所示。
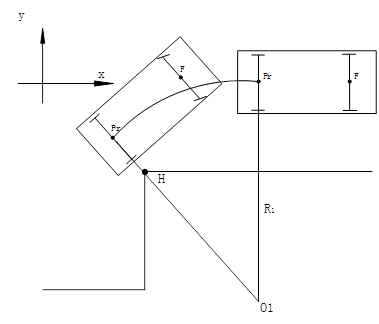
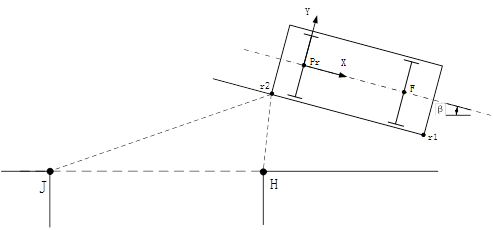
主要通过多个激光雷达传感器融合技术获取车辆周围环境和车位信息,利用两个激光雷达传感器及相关技术,可以更好的采集更新车辆位置及路径信息,有利于减小实际泊车误差。根据车辆在低速运动时的特点,忽略车轮运动过程中的侧滑,建立基于阿克曼转向原理的汽车运动学模型,分析在泊车过程中参考坐标点的变化规律,规划泊车路径,并利用软件进行仿真分析和验证。经过查阅资料和试验仿真分析发现,采用前进式垂直泊车所需的通道宽度大小比后退式泊车大。对于平行泊车而言,前进式泊车也需要更大更长的车位。采用后退式驾驶方式往往能够大大的降低操纵的复杂度。
通过数字建模对泊车场景进行分析,先将泊车区域根据车辆状态划分为可行驶状态区域和碰撞状态区域,建立最优泊车轨迹决策方法,针对不同泊车工位进行分段式规划,决策出最优的泊车参考轨迹。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: