基于机器视觉的移动机器人轨迹跟踪的建模与仿真毕业论文
2020-02-19 19:21:40
摘 要
随着机器视觉和移动机器人的共同发展,移动机器人与机器视觉的结合使移动机器人具备人眼的视觉能力,这使移动机器人在现实生活中也具有更高的应用价值,目标轨迹跟踪在智能交通、视频监控等领域的应用更加广泛。
本文在深入的对机器视觉和移动机器人进行了研究之后,从运动目标检测、运动目标跟踪两方面对移动机器人的目标检测与跟踪问题展开研究。
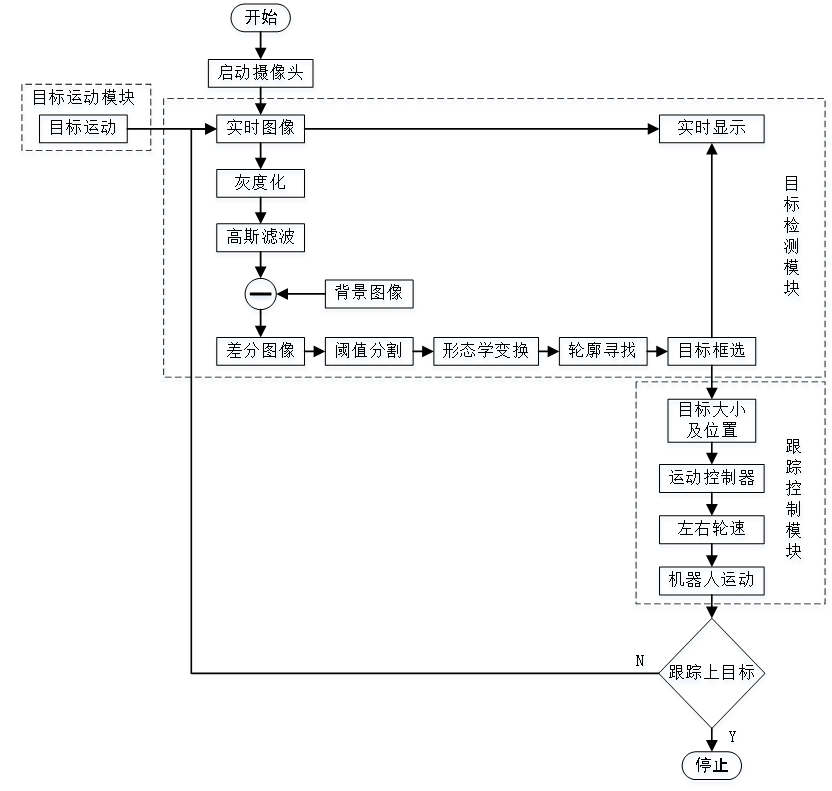
首先,在运动目标检测方面,通过对光流法、帧间差分法、背景差法的原理及其各自的优缺点进行分析,选择利用背景差法对运动目标进行检测。背景差分法检测到的运动目标轮廓清晰,即使环境存在一定的干扰也能检测出运动目标。
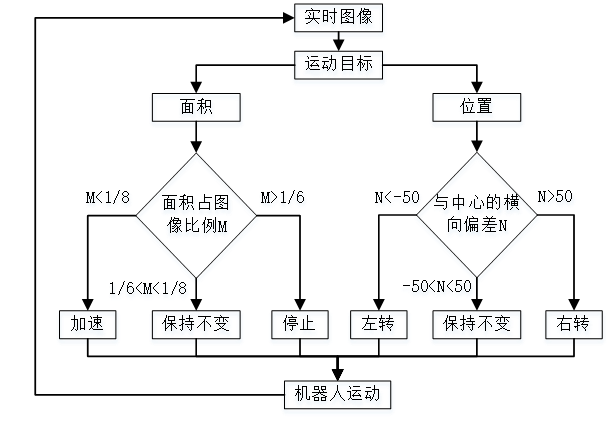
其次,在运动目标跟踪方面,针对本文实验环境提出一种运动目标跟踪方法。在输入的视频图像序列中,运动目标移动时,将帧间时间间隔设置一个较小值,通过运动目标在实时图像中的大小和位置调整移动机器人的运动策略,实现对运动目标的跟踪。
最后在ROS环境下运用gazebo仿真器对输入的视频图像序列中的运动目标进行检测与跟踪仿真,验证算法的可靠性。结果表明本文所使用的算法能对运动目标进行实时准确的跟踪。
关键字:运动目标;机器视觉;移动机器人;检测与跟踪
Abstract
With the common development of machine vision and mobile robot, the combination of mobile robot and machine vision enables mobile robot to have the visual ability of human eyes, which makes mobile robot have higher application value in real life. Target trajectory tracking is more widely used in intelligent transportation, video monitoring and other fields.
After in-depth research on machine vision and mobile robot, this paper studies the target detection and tracking of mobile robot from the two aspects of moving target detection and tracking.
Firstly, in the detection of moving targets, the principles of optical flow method, inter-frame difference method and background difference method as well as their advantages and disadvantages are analyzed, and background difference method is selected to detect moving targets. The moving target detected by the background difference method has a clear contour and can be detected even if there is some interference in the environment.
Secondly, in the aspect of moving target tracking, this paper proposes a moving target tracking method for the experimental environment. In the input video image sequence, when the moving target moves, the time interval between frames is set to a small value, and the motion strategy of the mobile robot is adjusted through the size and position of the moving target in the real-time image to achieve the tracking of the moving target.
Finally, in ROS environment, gazebo simulator is used to detect and track moving targets in the video image sequence input, so as to verify the reliability of the algorithm. The results show that the algorithm can track the moving target accurately and in real time.
Key Words: moving target; machine vision; mobile robot; detecting and tracking
目录
摘 要 I
Abstract II
第1章 绪论 1
1.1研究背景及意义 1
1.2移动机器人的研究现状 2
1.3运动目标检测与跟踪控制的研究现状 4
1.4 本文主要研究内容 6
第2章 运动目标轨迹跟踪总体设计 7
2.1图像处理 7
2.1.1图像灰度化 7
2.1.2 图像滤波 8
2.1.3图像二值化 8
2.2 移动机器人开发平台 9
2.3 机器人操作系统 ROS简介 10
2.3总体方案设计 11
2.4本章小结 12
第3章 运动目标检测 14
3.1运动目标检测概述 14
3.2运动目标检测经典算法 14
3.2.1 光流法 14
3.2.2 背景差法 14
3.2.3 帧间差分法 15
3.3本文采用的运动目标检测方法 16
3.4本章小结 17
第4章 运动目标轨迹跟踪控制 18
4.1 运动目标轨迹跟踪概述 18
4.2 运动目标轨迹跟踪方法分类 18
4.3 本文采用的跟踪算法 19
4.4本章小结 20
5运动目标轨迹跟踪仿真实验 22
5.1 实验环境说明 22
5.2 实验平台搭建 22
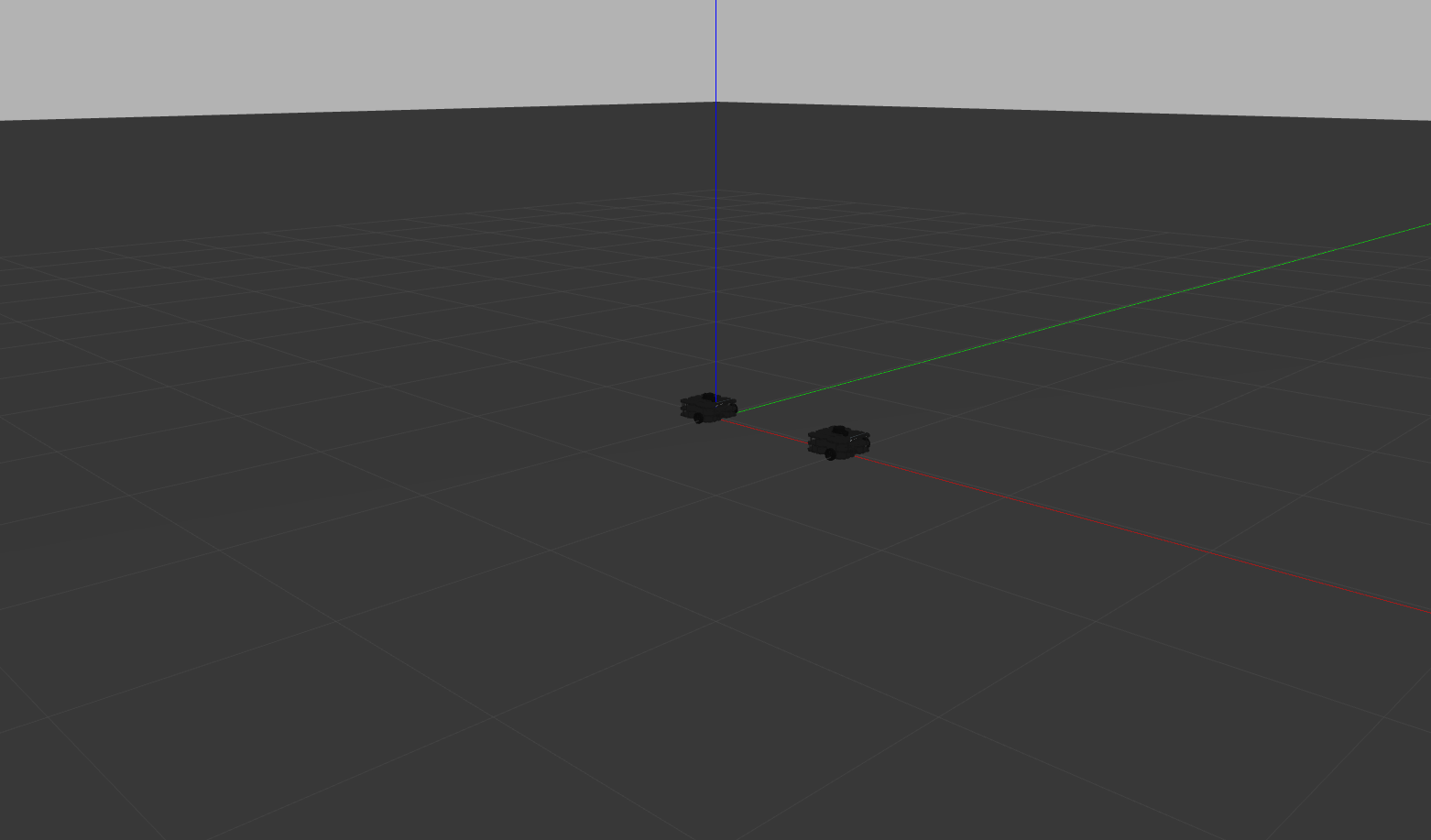
5.2.1 环境及模型加载 22
5.2.2通信节点的连接 24
5.3 基于移动机器人的仿真实验 25
5.3.1 运动目标检测实验 25
5.3.2 运动目标轨迹跟踪实验 25
5.4本章小结 27
第6章 经济性分析 28
第7章 总结与展望 29
7.1 工作总结 29
7.2 研究展望 29
参考文献 31
附录A (环境启动程序) 32
附录B (目标运动程序) 34
附录C (跟踪控制程序) 35
致谢 38
第1章 绪论
1.1研究背景及意义
近年来随着我国科学技术水平的提高,机器人技术得到了飞速的发展,并吸引了无数的研究者投身到机器人领域之中。机器人技术是一门极具代表性的综合学科,涉及计算机、机械、控制论、通信和仿生学等多门学科[1],其使用范围已经遍及旅游、医疗、工业、家庭、交通、教育、服务等各行各业,人们的日常生活也因此发生了巨大的变化。如今机器人技术的研究水平已经成为了一个国家自动化和信息化程度的象征[2],而机器人技术研究水平最重要的评判标准就是其智能化程度,机器人的智能化程度越高,它能完成的任务就越复杂,在完成任务的过程中人的参与度就越低。全球范围内的机器人研究者在提高机器人的智能化程度上付出了巨大的努力,有效的促进了科技领域的发展。
移动机器人作为机器人大家庭一个重要组成部分,是目前机器人研究者的热点研究方向。移动机器人集路径规划、导航、避障、轨迹跟踪、视觉伺服于一体,具有高度的智能化,能够在复杂恶劣环境中自主运动[3]。移动机器人因其工作效率高,成本低,应用范围广等特点在各行各业中得到了广泛的推广,大大降低了人工费用。而且移动机器人能在一些人类肉体无法承受的环境下工作,减少工作人员的危险。如在水下作业的机器人,能承受巨大的水压正常进行工作,无需频繁的对机器人进行维护,而且能比人类下潜到更深的水底。在家庭服务中,最常见的扫地机器人已经进入千家万户,自主在室内进行移动,并对地面进行清扫,安全、高效,将人类从体力工作中解脱出来。机器人同样也被应用到了医疗方面,目前的医疗机器人已经具备协助医生进行手术的能力,而且不会受到外界环境的干扰,操作也更加准确。在航天和军事领域中也得到广泛的使用,很大程度上避免了人员伤亡,如在太空中的卫星,还有火星探测器等。在人类与机器人的博弈,AlphaGo与九段围棋选手李世乭的比赛吸引了无数人的关注,最终AlphaGo机器人取得了胜利,Master机器人大战成名已久的国际围棋大师,取得让人瞋目结舌的60连胜,这展现出了机器人在人工智能技术下的强大能力。随着人们生活质量的提高,对社会服务业的要求也不断上升,开始有越来越多的不同种类不同用途的移动机器人开始进入千家万户,成为帮助人们从事重复性体力劳动的好帮手。
机器人主要是通过各种传感器来获取外界信息,而这些传感器中最重要的就是视觉传感器。视觉传感器是机器人观察和认知世界的重要感官,如同人眼一样,机器视觉让机器人具有人眼的视觉能力,代替人眼实现对周围环境信息的获取和理解,在机器人完成工作的过程中具有不可替代的作用。当机器人具备人眼的视觉能力,便能完成更多更有挑战性的任务。
运动目标轨迹跟踪作为移动机器人领域的一个重要研究方向,近些年来成为了机器人领域的热点问题。运动目标轨迹跟踪是指从包含运动目标的视频图像序列中检测出运动目标,并对目标进行随动跟踪的过程[4],是移动机器人自主完成各种复杂任务的前提,广泛应用在空间探测、家庭服务、场景监控等领域。运动目标轨迹跟踪的实现涉及人工智能、机器视觉、运动控制等多个领域,在智能化的现代社会具有广阔的应用前景。它在追踪拍摄,灾难救援,多机器人编队和现代军事战争等应用中都非常重要,一直以来都是科学家关注的重要课题之一[5]。它的理论知识不仅加快了移动机器人的发展进程,也对我国的科学技术的进步起到了一定的促进作用。因此,本论文的研究内容具有十分重要的应用价值和广阔的发展前景[6]。
1.2移动机器人的研究现状
移动机器人已成为当今科研工作者的重要研究方向,它可以代替或者协助人类完成许多人类难以完成的任务,具有十分广阔的发展前景和庞大的市场需求,近些年来引起了各个强国的重视。许多高新技术公司、高等学府等相继投入大量资金,为提高机器人的智能化程度展开深入的合作。
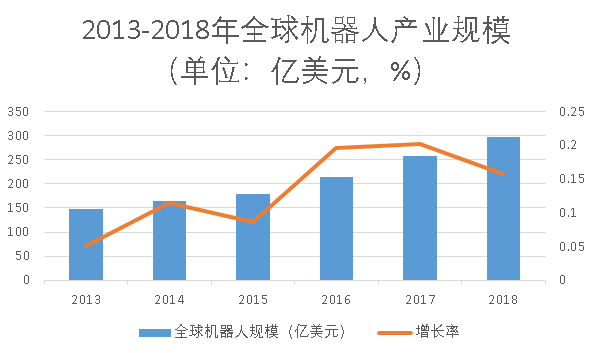
图1.1 机器人产业发展趋势
移动机器人种类繁多,其移动机构主要有轮式移动机构、履带式移动机构及足式移动机构,此外还有蠕动式移动机构、蛇行式移动机构和混合式移动机构,不同的移动方式适用于不同的工作环境和场合。移动机器人按功能和用途不同可分为:医疗机器人、军用机器人、娱乐机器人、清洁机器人等,按作业空间来分:陆地移动机器人、水下机器人、无人机和空间机器人[7]。在应用领域上来看总体分为4大应用范围:服务机器人、工业机器人、军事机器人、探索机器人,如图1.2所示。
(a) 服务机器人 | (b) 工业机器人 |
(c) 军事机器人 | (d) 探索机器人 |




图1.2 移动机器人应用领域
移动机器人早期研究是在60年代末期,斯坦福研究院的Nils Nilsse和Charles Rosen为了研究智能移动机械,使机械系统在复杂的环境中具备自主判别、调节和控制能力,研发出一台能自主移动的机器人Shakey,这拉开了移动机器人研究的序幕,改变了机器人仅仅只作用在工业领域的状况,机器人的应用开始向军事、民用、农业等多个领域扩展[8]。
1992年波士顿动力学公司研发了全球第一个能自我平衡的跳跃机器人,并成功取得了美国国防部的合作,之后便一直与美国军方进行联合研发,如今的“大狗”机器人已经是目前最成功的行走机器人。它不仅能背负重量超过160千克的重物前行,还可以翻越最大35度的斜坡,而且这种机械狗比人类都跑得快,行进速度可达到7千米/小时。“大狗”机器人体内装配有一台计算机,这使“大狗”机器人既可以根据环境的不同自行调整姿态,还可以进行远程控制使其按照指定的路线行进。
轮式移动机器人依靠车轮进行移动,控制相对简单,结构也十分稳定,许多公司都把轮式移动机器人作为移动机器人的首选,并有研发自己的移动机器人产品,这些产品都具有一定程度的智能,能自主进行路径规划躲避路径上的障碍物。MobileRobots公司与斯坦福大学SIR实验室进行技术合作,研发出了pioneer机器人,主要供大学及研究机构使用。该机器人配备有加利福尼亚斯坦福大学SIR开发的精密导航数据库,能够使用激光雷达获得周围物体的距离和位置,利用编码器来对机器人的位置进行定位,最终对周围环境建立精确的平面地图,利用构建的地图进行定位、路径规划等工作。
在移动机器人领域内,我国虽然起步较晚,与欧美发达国家有一定的差距,但是在国家相关政策的鼓励下,经过近几十年的飞速发展,我国在移动机器人领域逐渐追赶上了全球机器人研究的前进步伐。我国的机器人事业从80年代开始萌芽,从一开始就得到了国家的重视[9]。在第七个五年计划中我国工业机器人的发展方向就被制定出来,“863”计划进一步的对智能机器人的发展做出了规划,使我国在水下机器人、危险作业机器人、服务机器人、医疗机器人、仿生机器人等领域都有了发展[10]。
新松机器人公司研发的救援机器人不仅能越过各种障碍,进入井下,监控井道中的危险气体的变化情况,提高预警能力,还能进行视频传输,将井下的情况实时到井外,方便根据井内具体的情况实施救援。清华大学研制了智能车THMR-v,它行驶时通过车体装备的摄像机和激光雷达来探路,并把获取到的路况信息实时的传送给车体模拟驾驶台。模拟驾驶台上的方向盘、油门踏板、刹车踏板都装有与计算机相连的位置传感器,模拟驾驶台收到路况信息后,会对收到的信息进行分析处理,重新规划智能车的行驶方向,通过计算机发出指令,使方向盘、油门等机械装置迅速做出相应的动作,使车体能够自动躲避障碍、加速或者慢行。在实际公路上运行时可以达到100km/h,达到了国际先进水平。沈阳自动化所研制的AGV自主车和防暴机器人在工业应用中取得很好的效果,哈尔滨工业大学研制的导游机器人也已被投入使用[11]。
随着工业2.0时代的到来,越来越多的人工操作将会被机器人取代,作为机器人的重要分支,移动机器人必然也会朝着更加智能化的方向发展。
1.3运动目标检测与跟踪控制的研究现状
运动目标检测与跟踪是对输入的一段连续的视频图像序列进行灰度化,滤波等图像处理操作,然后对运动目标的特征参数进行提取,利用特征参数对运动目标进行检测和跟踪。检测的准确性影响跟踪的稳定性,同时,跟踪的稳定性也影响检测的准确性,检测与跟踪相辅相成。目前关于运动目标检测与跟踪的研究分为两种,一种是基于视频进行跟踪,另一种是基于场景进行跟踪,前者主要用于视频监控等领域,首先在图像中提取目标特征,将特征与视频图像序列进行匹配,找到视频每一帧中的目标位置,将这些位置连起来即得到目标轨迹;后者主要用于移动机器人领域,通过获取场景模型,判断目标与机器人实际位置偏差,然后采取某种策略趋近目标,本文属于后者。
运动目标检测与跟踪技术在多目标追踪处理、目标分割以及信息交叉融合处理等领域应用十分广泛,促进了多个学科相互融合,共同发展。目前国内外的研究者已经提出了很多行之有效的方法及有发展意义的理论,在运动目标检测与跟踪技术的发展过程中有很高的指导意义。并且已经有很多的研究者在仿真环境下进行了运动目标检测与跟踪控制的实验,并取得了非常好的效果。但是在现实环境下,还是存在着不少的问题,由于环境的多样性和复杂性、光照的变化等外界条件的干扰和机器人的运动误差等因素都导致了目标的检测与跟踪的精确度不高。目前对于如何提高目标检测与跟踪方法的适用性和准确性,仍然有很多更深层次的内容需要进一步的挖掘。
美国于1997年设立了VSAM研究中心[12],与卡内基梅隆大学进行联合研究,VSAM系统将背景差法和帧间差分法进行结合,把运动目标从背景中分离出来,在摄像头不运动时产生了很好的效果。但是该方法需要计算的图像较多,而且计算复杂,效率低下,有一定的局限性。美国的里海大学于1988年实现对近距离全方位视觉感知的目标检测和跟踪,在此基础上,宾夕法尼亚大学于2000年在距离方面实现了突破[13]。马里兰大学于2000年研究实时监控系统获得成功,利用物体的形态进行分割,根据分割出来物体的特征进行跟踪。2006年,R.Venkatesh Babu等人对Meanshift算法进行了改进,提高了算法的跟踪性能,使目标即使受到了一部分的遮挡也能准确的进行跟踪。
经过多年的研究和探索,我国的目标检测与跟踪控制研究发展也比较迅速,取得了丰富的成果。中科院自动化研究所在该领域做了大量的工作[14],在车辆的检测和跟踪方面取得了很多成果,率先实现了对交通领域中单个运动车辆的检测与跟踪,给智能交通的发展带来了极大便利,该技术在国内处于领先地位。除此之外,国内还有许多高校、企业和研究所也进行了这方面的研究,中南大学王璐在移动机器人上加装了摄像机云台[15],通过预测目标的下一步位置,控制摄像头转动实现对目标的跟踪,建立了闭环跟踪控制系统,并验证了该系统的跟踪效果和实践性能。上海交大研究的自主移动机器人拥有很高的智能,能利用自身的传感器判断目标的移动方向,根据目标的位置和方向进行目标跟踪。清华大学研发的车道线检测系统能自动获取目标运动信息,并进行分析处理,在智能交通方面有很大的市场应用前景。
随着人们安全防范意识的不断增强,生活中摄像头随处可见,运动目标检测与跟踪技术在不知不觉中就应用到了人们的生活当中。以往,中国对跟踪算法的研究只停留在理论层面上,如今,随着研究的不断深入,运动目标检测与跟踪技术在实际生活中已经得到了大量的应用,实现了从原始的手动人工的操作到智能化自动跟踪的跨越。
1.4 本文主要研究内容
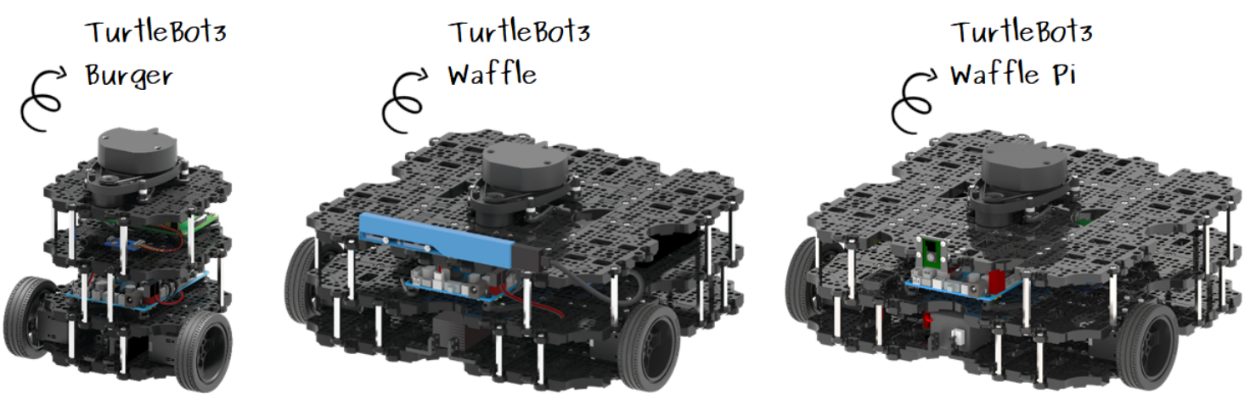
本文将Turtlebot3移动机器人作为被控对象,利用Turtlebot3移动机器人研究基于机器视觉的轨迹跟踪控制问题。在Ubuntu系统下搭建ROS(Robot Operating System)实验平台,在ROS的Gazebo仿真器中对移动机器人跟踪运动目标的过程进行仿真。主要包括以下内容:(1)研究了基于OpenCV的运动目标检测方法;(2)研究了移动机器人目标轨迹跟踪控制方法。论文共分为六章,具体安排如下:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: