基于D-H法的多关节串联机器人机构设计及其运动学分析毕业论文
2020-02-19 19:24:08
摘 要
多关节串联机器人是工业机器人发展中至关重要的一个环节,其结构设计及其运动学分析是多关节串联机器人设计生产中的核心任务,本文将基于D-H法,完成对多关节串联机器人的机构设计及其运动学分析的工作。本文针对用于焊接工作的六自由度串联机器人,通过三维建模的方式完成其机构的设计,主要分析其方案设计和各关节之间的连接形式。然后利用D-H法,解得其坐标系图和D-H参数表,根据其DH参数表,从正向运动学和逆向运动学两个方面对机械臂在空间中的位姿进行分析计算。在运动学分析求解过程中,利用MATLAB软件,拟定路径上的100个点,求其具体的数值解。利用MATLAB软件,对机械臂进行轨迹规划仿真,求得其各关节角度曲线,各关节速度曲线,各关节加速度曲线,末端执行器运动曲线,最终求得机械手实际运动轨迹。利用ADAMS进行机械臂整个工作过程的仿真模拟,对运动学分析过程进行检验。
关键词:机械臂;D-H法;机构设计;运动学分析;轨迹规划仿真
Abstract
Multi-joint tandem robot is a crucial link in the development of industrial robots. Its structural design and kinematics analysis are the core tasks in the design and production of multi-joint tandem robots. This paper will complete the mechanism of multi-joint tandem robots based on DH method. Design and its kinematics analysis work. In this paper, the six-degree-of-freedom tandem robot used for welding work is designed by three-dimensional modeling, and its design and connection form between joints are mainly analyzed. Then, using the D-H method, the coordinate system diagram and the D-H parameter table are obtained. According to the DH parameter table, the pose of the robot arm in space is analyzed and calculated from the aspects of forward kinematics and inverse kinematics. In the kinematics analysis and solving process, using MATLAB software, 100 points on the path are drawn and the specific numerical solution is obtained. Using MATLAB software, the trajectory planning simulation of the manipulator is carried out, and the joint angle curve, the joint velocity curve, the joint acceleration curve and the end effector motion curve are obtained, and the actual motion trajectory of the manipulator is finally obtained. The simulation of the kinematics analysis process was carried out by using ADAMS to simulate the whole working process of the mechanical arm.
Key Words:robotic arm;D-H method;institutional design;kinematic analysis;trajectory planning simulation
目录
第1章 绪论 1
1.1目的和意义 1
1.2国内外现状分析 1
1.3设计内容 2
1.3.1机械臂的结构设计 2
1.3.2机械臂的DH参数和DH模型 2
1.3.3机械臂的运动学分析 2
1.3.4机械臂轨迹规划仿真 3
1.4论文结构 3
第2章 六自由度串联机械臂的机构设计 1
2.1设计内容概述 1
2.2 方案设计 1
2.3各连杆的结构设计 2
2.3.1六自由度串联机械臂的总体结构 3
2.3.2基座 4
2.3.3连杆1、2、3 6
2.3.4连杆4、5、6 8
2.4机械臂内连杆连接情况 10
第3章 六自由度串联机器人运动学分析 12
3.1机械臂的DH模型及其参数 12
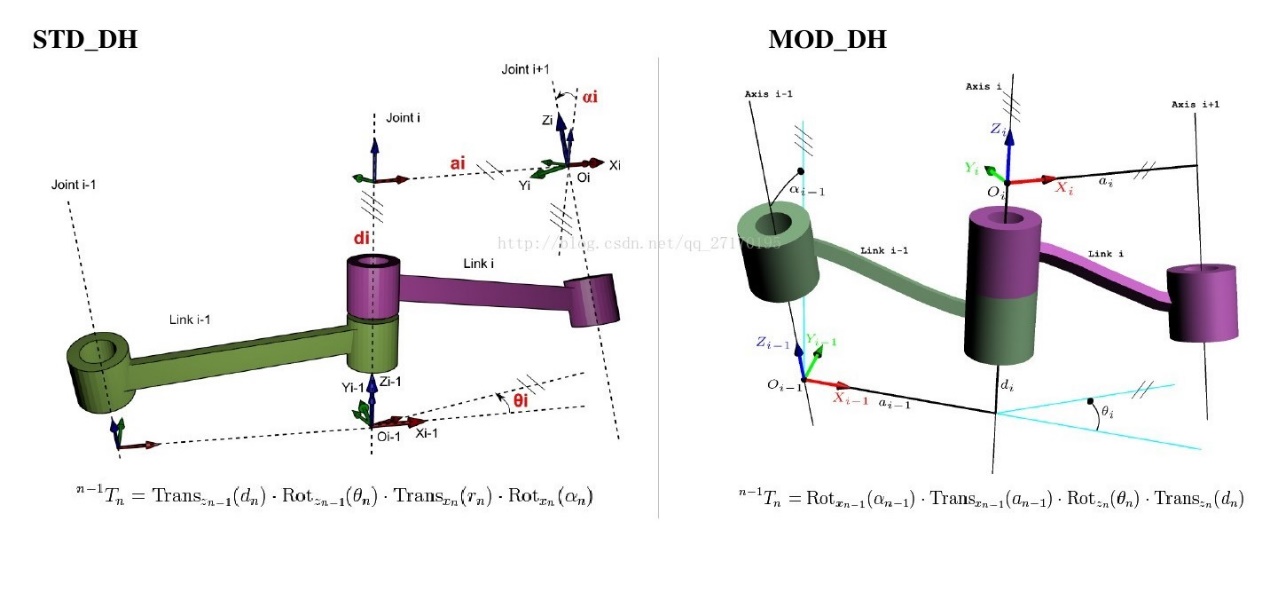
3.1.1标准DH与改进DH的选择 12
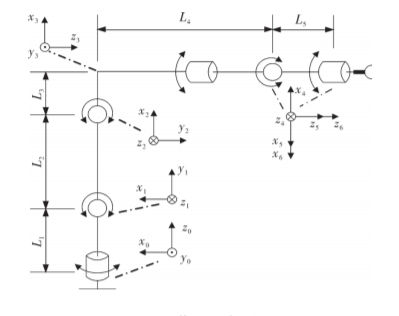
3.1.2机械臂的机械臂坐标系及其DH参数 13
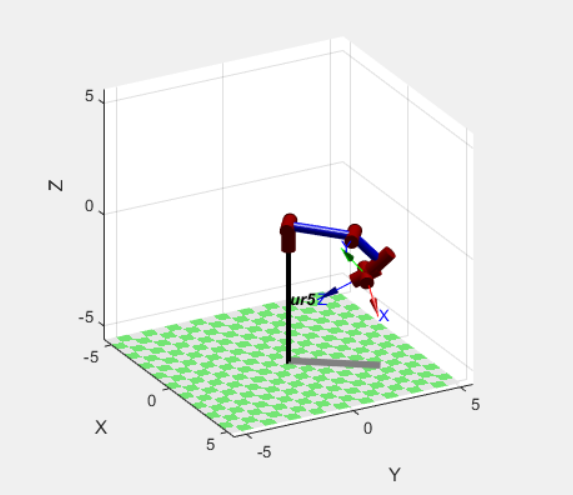
3.1.3在MATLAB中建立DH模型 14
3.2机械臂正向运动学分析 15
3.3机械臂的逆向运动学分析 17
第4章 机械臂轨迹规划和运动过程仿真 20
4.1软件的选用 20
4.2六自由度串联机械臂轨迹规划仿真 20
4.3六自由度串联机械臂运动过程仿真并检验 25
第5章 总结与展望 29
5.1工作总结 29
5.2工作展望 30
5.3经济性和环保性分析 31
5.3.1经济性分析 31
5.3.2环保性分析 31
致谢 32
中外文参考文献 33
附录 35
附录一 35
附录二 35
附录三 37
附录四 40
附录五 44
附录六 47
第1章 绪论
1.1目的和意义
随着国际社会发展至今,我国也处于发展的关键路口。目前,随着我国由于劳动力价格低廉的红利逐步消失,人力资源的成本逐步增加,为了保持我国继续稳中求进的发展,机器人技术无疑成为了一大突破口。如今,随着机器人行业的逐渐发展与完善,机器人行业的发展水平也是国家国力的一种体现。在新一轮技术革命和产业变革的时代背景下,全球各主要经济主体将积极围绕以工业机器人为主的智能制造业展开激烈竞争。可以预期,工业机器人将为我国全面提升社会生产力提供支持,并为我国加快经济转型、建成创新型国家做出重要贡献。在新一轮技术革命和产业变革的时代背景下,全球各主要经济体积极围绕以工业机器人为主的智能制造业展开激烈竞争。顺应趋势,国家相关部门陆续颁布《机器人产业发展规划》,《智能制造发展规划》,《新一代人工智能发展规划》等文件,这使推动工业机器人产业的发展得以上升为国家战略。可以预期,工业机器人将为我国全面提升社会生产力提供支持,并为我国加快经济转型、建成创新型国家做出重要贡献,因此,机器人的发展也将成为提升我国实力的重中之重。
对此,本文将针对六关节串联机器人,通过拟定其末端执行器的工作情况,完成其基础的结构设计和运动学分析等工作。
1.2国内外现状分析
国内的工业机器人产业起步于上世纪70 年代,大致可分为以下几个阶段:第一阶段是1970年到1985年的“萌芽期”, 此阶段主要侧重于工业机器人的理论研究;第二阶段是1986年到1990年的“技术研发期”,此阶段政府加大了对工业机器人研究的支持力度,并制定出详细的工业机器人技术攻关计划;第三阶段是 1991 年到 2000年的“原型开发期”,此阶段国内对焊接机器人、计算机数控机床等相关技术和设备进行了优先开发,并以此奠定了国产机器人商品化和工业化推广的基础。同时,一些工业机器人制造商也在市场中崭露头角,如:新松机器人、北京机械工业自动化所及广州数控等。第四阶段是 2001年到2010年的“初步工业化期”,此阶段国内首次对工业机器人进行了规模化使用,重点包括深海载人、高精切割、危险作业、反恐军械等领域。第五阶段是2011年~现在的“快速发展期”,此阶段工业机器人的采购、生产和应用开始激增。2013年,中国超越日本成为全球最大的工业机器人市场;2016年,中国工业机器人企业的数量达到 1500 家,仅广东省就超过了280家;2017年,中国工业机器人的销售数量接近10万台,占全球工业机器人市场的1/3。不仅如此,长三角、珠三角、环渤海和中西部地区还分别形成了各自具有代表性的工业机器人产业聚集区域。
但对比世界市场,我国目前工业机器人技术及体系还不够成熟,预计随着相关技术的突破,未来我国机器人市场容量将有望十倍或数十倍扩张。目前,服务机器人处于产业化前期,现在医疗机器人和功能简单的家庭服务机器人已经率先产业化。现阶段机器人产业类似上世纪80年代的计算机行业,处于重大变革期。参考工业计算机和PC市场容量的巨大差异,未来实现个人机器人之后,可能诞生一个千亿美元级别的全球机器人市场。因此,把握住机器人发展的机遇,不仅对于个人,对于国家和民族,亦是一个不容错过的机会,我们需要加倍的重视。
1.3设计内容
本文以六自由度工业机械臂为研究对象,以DH法为基础,完成基于DH法的多关节串联机器人的机构设计及其运动学分析,本研究的基本内容分为以下4点:
1.3.1机械臂的结构设计
机械结构设计需要完成对机械手的结构设计,机械手六个自由度即为六个自由活动关节外加基座,需对其每一个构件进行其参数化的计算与设计,并利用SOLIDWORKS完成其三维建模。
1.3.2机械臂的DH参数和DH模型
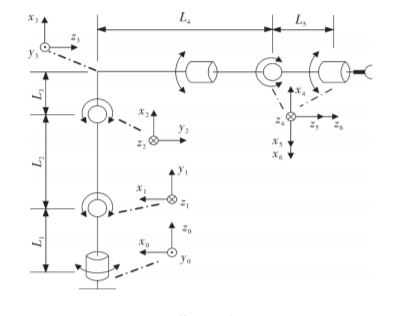
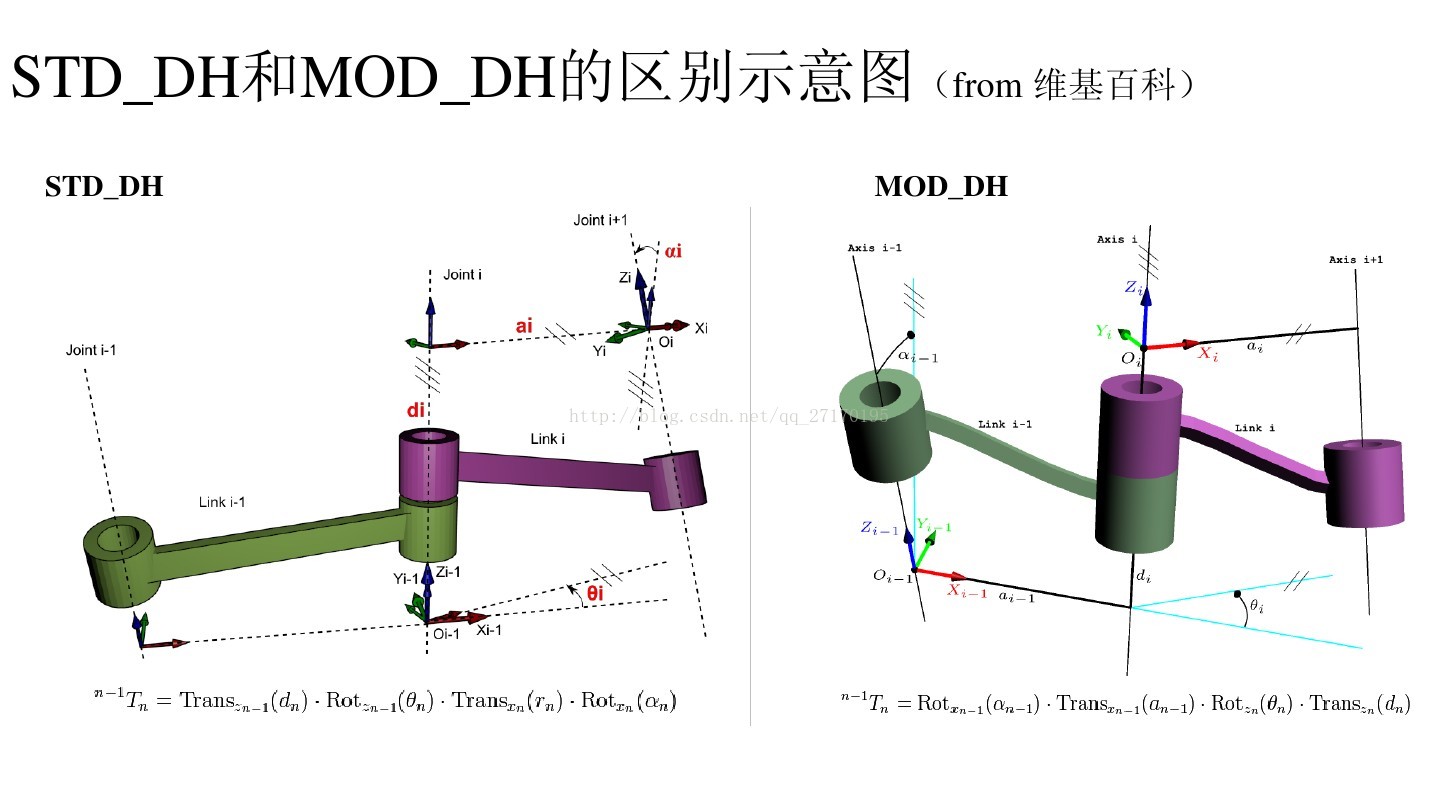
分析比较两种DH参数(标准DH和改进DH)的差异性的优劣性,本文采用标准DH参数。根据标准DH四个参数的定义,求解本文研究的六自由度机械臂的DH参数表。利用MATLAB软件中的robotics toolbox工具箱,对其DH参数进行建模,求得其DH模型,这是后续运动学分析研究的基础。
1.3.3机械臂的运动学分析
根据其DH参数表,从正向运动学和逆向运动学两个方面对机械臂在空间中的位姿进行分析计算。正向运动学分析是通过机械臂各个关节的角度的变化结合其连杆参数,对机械臂末端位姿的求解。逆向运动学分析是根据机械臂实际工作情况中末端执行器位姿的需要,求解其各个关节的角度的值,以达成末端执行器的工作需求。在运动学分析求解过程中,利用MATLAB软件,拟定路径上的100个点,求其具体的数值解。
1.3.4机械臂轨迹规划仿真
基于MATLAB对运动学分析的结果进行轨迹规划仿真,求得各关节角度曲线,各关节速度曲线,各关节加速度曲线,末端执行器运动曲线,最终求得机械手实际运动轨迹。利用ADAMS进行机械臂整个工作过程的仿真模拟,对运动学分析过程进行检验。
1.4论文结构
本论文分为五章。
第一章为绪论,主要介绍了课题研究的目的和意义,以及国内机器人行业发展的背景和现状,确定了论文研究内容和论文结构。
第二章为机械臂的机构设计,主要对于六自由度串联机械臂,主要针对机械臂的方案设计、结构设计、机构各自由度的连接过程的描述,完成对其机构设计的简要说明。
第三章为六自由度机械臂的运动学分析。首先,分析比较两种DH参数(标准DH和改进DH)的差异性的优劣性,本文采用标准DH参数。根据标准DH四个参数的定义,求解本文研究的六自由度机械臂的DH参数表。利用MATLAB软件中的robotics toolbox工具箱,对其DH参数进行建模,求得其DH模型,这是后续运动学分析研究的基础。然后,根据其DH参数表,从正向运动学和逆向运动学两个方面对机械臂在空间中的位姿进行分析计算。通过依次列写以θ为变量的相邻两关节的位姿变换矩阵,最后根据各个变换矩阵依次相乘,得出机械臂末端执行器的位姿矩阵,完成对其正向运动学的求解。逆向运动学分析是根据机械臂实际工作情况中末端执行器位姿的需要,求解其各个关节的角度的值,以达成末端执行器的工作需求,完成其逆向运动学的求解。在运动学分析求解过程中,利用MATLAB软件,拟定路径上的100个点,求其具体的数值解。
第四章为机械臂轨迹规划仿真,主要利用MATLAB和ADAMS两个软件对机械臂进行轨迹规划的仿真。首先,利用MATLAB中的robotics toolbox工具箱,对机械臂整个工作过程进行编程,然后运行得出各关节角度曲线,各关节速度曲线,各关节加速度曲线,末端执行器运动曲线,机械臂运动轨迹曲线图。利用ADAMS进行机械臂整个工作过程的仿真模拟,通过力学性质对运动学分析过程进行检验。
第2章 六自由度串联机械臂的机构设计
2.1设计内容概述
随着机器人行业的逐步发展和壮大,功能全面、结构稳定的机械手成了众多工业项目共同的追求。而其制造过程之中,首当其冲的便是其结构的设计。串联机械臂的设计与传统机械设计相比,有其特别之处。原因主要有以下几点:
1)多自由度串联机械臂是由一系列的连杆通过旋转关节和移动关节所连接的运动链。其自由度越多,对于各连杆及其末端执行器的运动分析和受力情况越复杂,每个关节的负载和运动参数都会随着工作中末端执行器的位姿发生变化而随之改变,所以无法用传统机构的运动学、静力学的方法分析多自由度串联机器人。因为多关节串联机械臂是一种多输入多输出、位置时变的动力学系统。故此,我们应对其进行专门的分析和设计方法。
2)因为由多自由度串联机械臂机构特性决定的其开链机构,在工况中,每个关节的误差和形变会加以累积,加倍的影响工作中机械臂末端执行器的精度,对工作造成影响。所以在多关节串联机械臂的设计过程中应当格外注意各关节和连接处的刚度与精度的设计问题。
3)由于其串联机构的结构,多自由度串联机械臂在其结构设计之时一定要更加严格的考量各关节连接处对于整体机构的紧凑性和灵巧性的影响。
本文拟定设计为用于焊接工况的六自由度串联机械臂,自由度即为机械臂结构中主动关节的数目。因为论文主体为基于DH法的运动学分析,故此章节主要针对机械臂的方案设计、结构设计、机构各自由度的连接过程的描述,对于驱动的选择以及各个杆件的结构设计和强度载荷不加以描述。
2.2 方案设计
在机械臂的工作运动之中,考虑到末端执行器需完成的功能较多(旋转、俯仰、摇摆、回转等),为了让末端执行器在工作空间内尽可能的达到任意位置,实现更全面的功能,一般情况下,我们将在前端承载末端执行器的位置至少构造三个自由度。综合考虑机械臂的末端执行器的位姿以及工作情况后,设定本文所研究机械臂为六自由度,其中手臂为三个自由度。
由于对比关节型机械臂和非关节型机械臂的优缺点,在相近的空间内,关节型机械臂的的可工作范围更大,且运动和轨迹更为灵活,故本文采用关节型机械手。关节型机械臂中的关节又可分为旋转关节和平移关节,而旋转关节具有相同范围内可操作空间大、结构紧凑、重量轻,故本文中机械臂采用六个旋转关节构成,极大化了机械臂末端执行器的工作范围和灵活程度,以适应更复杂的工况。
对于控制和传动方面,常用的有如下两种方案:一种是利用气动进行控制,采用气压传动。其具有节能环保、成本低廉、易于维护、安全可靠等优点,缺点是工作力矩较小、稳定性较差、虽无能源污染但有噪声干扰的缺点。另一种是利用电气进行控制,采用机械传动的形式。其具有控制精度高、传动结构相对简单、环保水平较高、无噪声污染等优点,缺点是价格比较昂贵。故此,综合考虑之后,本文所示机械臂将采用以电气控制为主,局部构件使用气动控制的机械臂,传动方式选取机械传动,两者结合以更好地实现机械臂在拟定工况内的工作。
2.3各连杆的结构设计
市场上现在常用的建模软件有SolidWorks、Proe、UG等多种,各有其特点,经过分析比较之后,本文选用SolidWorks进行对六自由度串联机器人的建模。SolidWorks的特点和优点主要包括:
- 完美适配Windows系统,全Windows界面,操作便捷简单,易于学习;
- 具有清晰、直观的用户操作页面,包括图形区域的动态的预览,可以在设计过程之中对设计的合理性进行审视;
- 灵活的草图绘制和检查功能;
- 强大的特征建立能力和零件与装配的控制功能。
下面依次介绍本文研究六自由度串联机械臂的各构件三维视图:
2.3.1六自由度串联机械臂的总体结构
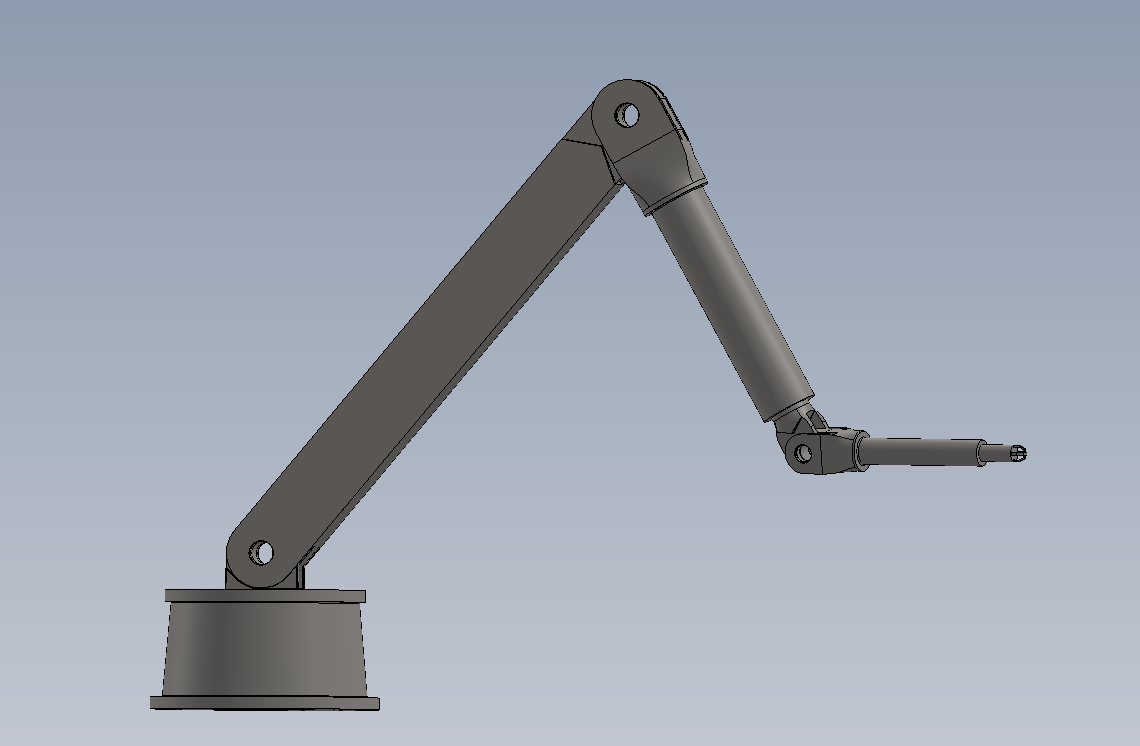
图2.1 六自由度串联机械臂的总体结构
2.3.2基座
图2.2 基座的整体结构
图2.3 基座的正视图、左视图
图2.4 基座的俯视图
图2.5 基座的剖视图
2.3.3连杆1、2、3
连杆1、2、3即为六自由度串联机械臂的大臂、小臂以及大臂与基座之间的旋转关节。其中连杆1与基座相连,构成一个旋转关节的自由度,连杆2(大臂)、连杆3(小臂)与连杆1依次串联连接。下图所示为连杆1、2、3的结构:
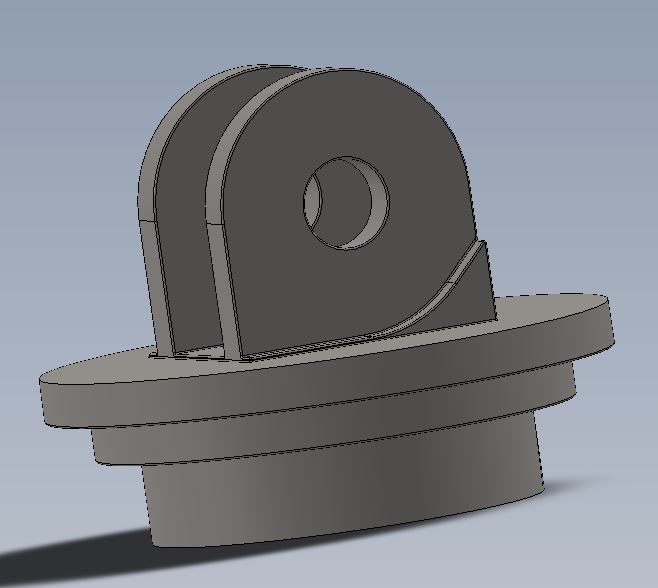
图2.6 连杆1的整体结构
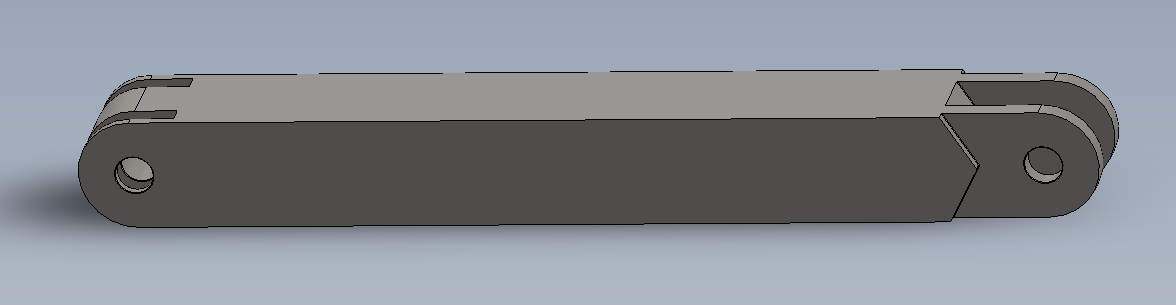
图2.7 连杆2(大臂)的整体结构
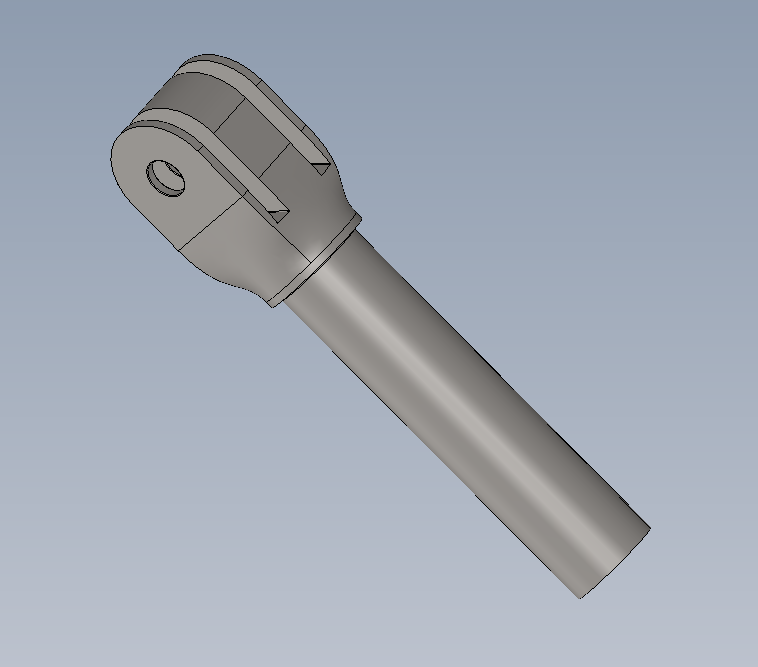
图2.8 连杆3(小臂)的整体结构
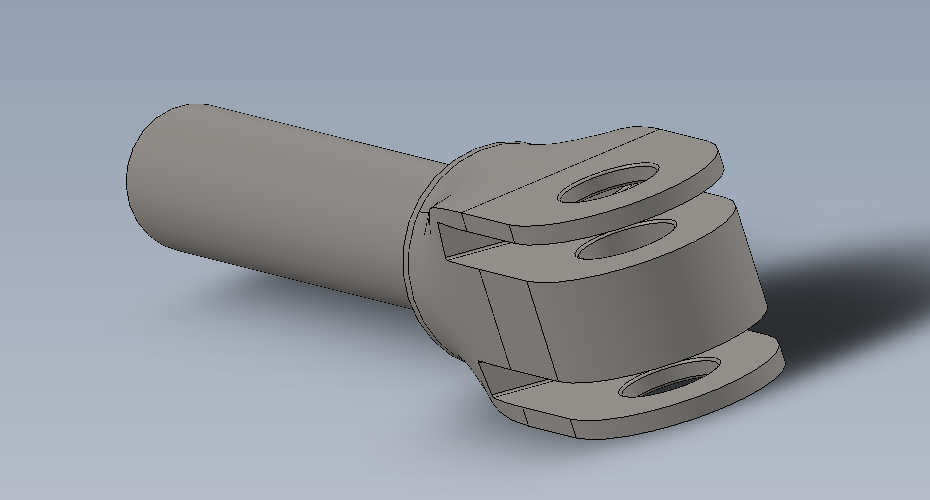
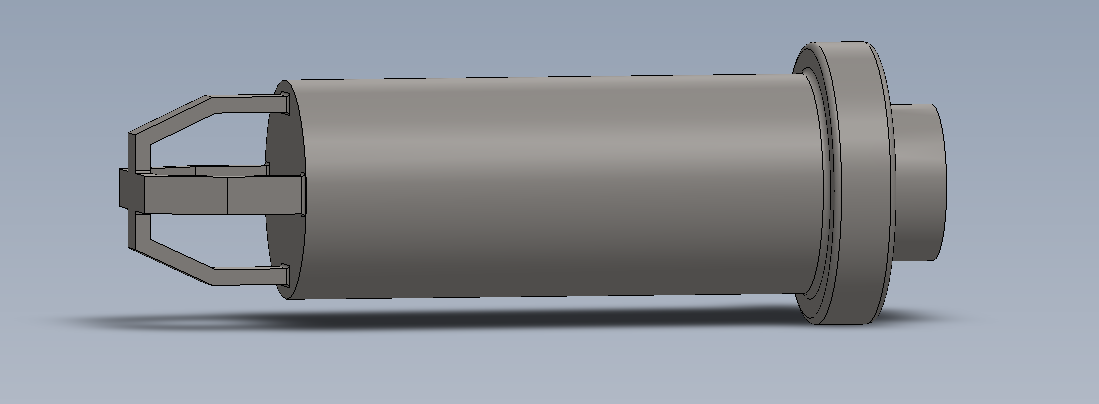
2.3.4连杆4、5、6
连杆4、5、6共同构成承载机械臂末端执行器(连杆6)工作运动的前端机构使其可以完成旋转、俯仰、摇摆、回转等一系列功能。下图所示为连杆4、5、6的结构:

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: