网联自动驾驶汽车运动规划与控制研究毕业论文
2020-02-19 20:29:53
摘 要
随着汽车在日常生活中的日益普遍,它所带来的问题也越来越明显,其中交通事故的频发问题尤为突出,而自动驾驶技术有望解决这一难题。无人车的自动驾驶技术集自动控制、体系结构、人工智能、视觉计算等众多技术于一身,其中无人车的运动规划和控制是自动驾驶技术的主要内容。
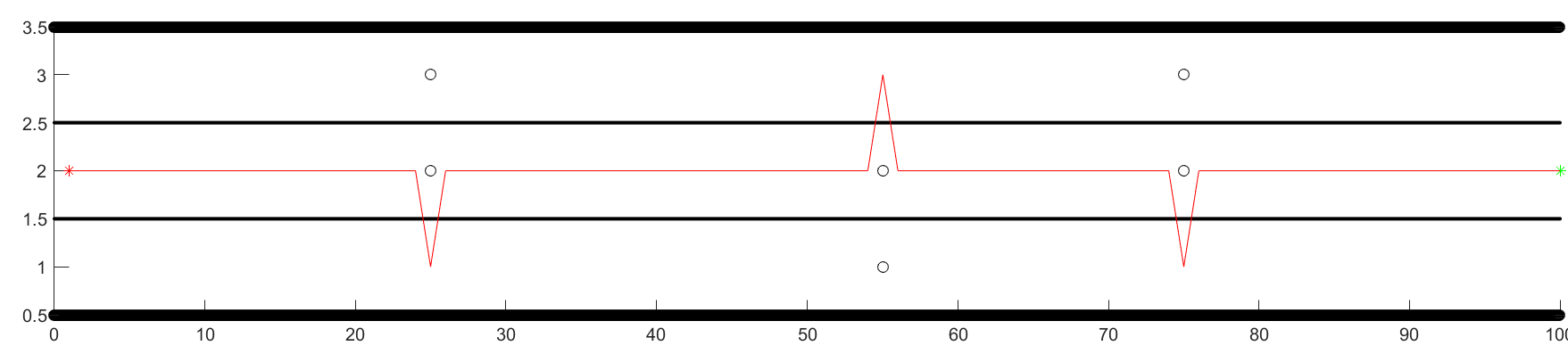
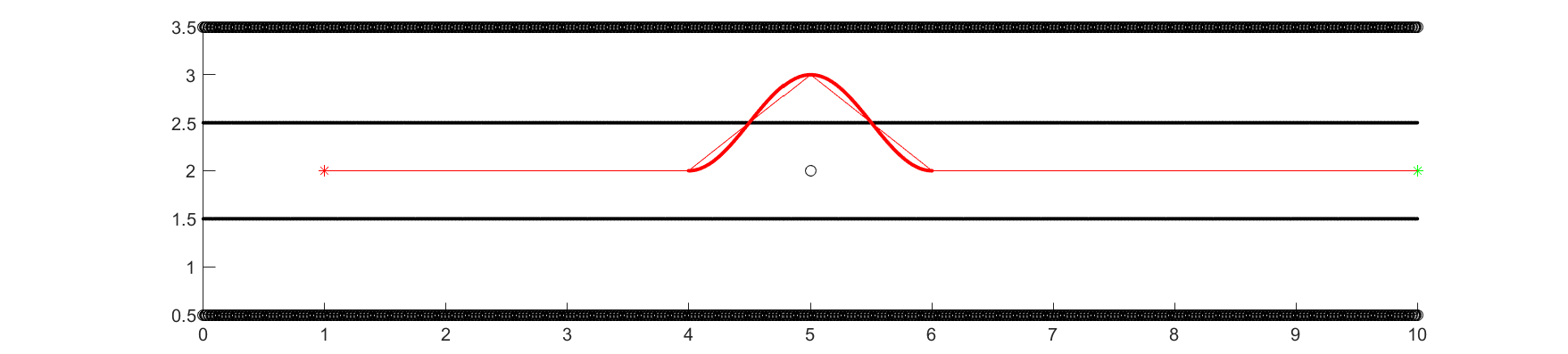
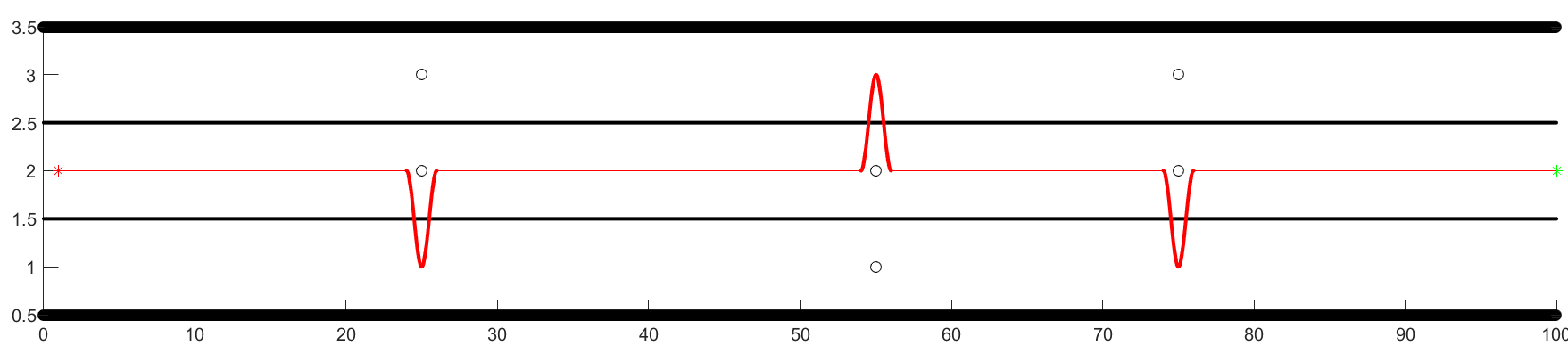
本文利用A*算法对路径进行规划,并对A*算法进行改进,将传统A*算法做路径规划时得到的轨迹中存在的尖锐拐点利用正弦曲线进行平滑处理,得出便于无人车行驶的合理轨迹,并在MATLAB上编程,实现单障碍物和多障碍物两种工况下的模拟;同时利用PID控制方法,首先建立车辆运动学模型,得到车辆横向、纵向及航向角变化率与车辆速度的关系,并设计PID控制器对无人驾驶汽车进行跟踪控制,使其可以在预设的路径上避开障碍物,并按照参照轨迹行驶,并在MATLAB/Simulink上进行不同速度下的仿真实验,结果表明:在低速情况下,PID控制器较为稳定。
关键词:运功规划 ;A*算法;跟踪控制;PID控制
ABSTRACT
With the increasing popularity of cars in daily life, the problems brought by cars are becoming more and more obvious, especially the frequent traffic accidents, which is expected to be solved by autonomous driving technology.Autonomous driving technology of unmanned vehicle integrates many technologies such as automatic control, architecture, artificial intelligence and visual computing, among which the motion planning and control of unmanned vehicle is the main content of autonomous driving technology.
In this paper, using the A-Star for path planning, and the A-Star was improved, the traditional A-Star for path planning of the trajectory in sharp turning point using sine curve smoothing, it is concluded that facilitate reasonable trajectory of unmanned vehicle driving, and on the MATLAB programming, implement single obstacle and obstruction simulation under two kinds of working conditions;With PID arithmetic at the same time, the first vehicle kinematics model is set up, get the vehicle lateral, longitudinal and course Angle rate of change and the relationship between the vehicle speed, and the PID controller is designed to tracking control of unmanned vehicle, which can avoid obstacles on the path of the preset, and according to the reference trajectory, and conducted on MATLAB/Simulink simulation experiments under different speed, the results show that under the condition of low speed, the PID controller is more stable.
Keywords: Motion planning; A-Star; Motion control; PID
目录
摘要 1
ABSTRACT 2
第一章 绪论 1
1.1. 研究背景及意义 1
1.2. 自动驾驶的国内外研究现状 1
1.2.1. 国外研究现状 2
1.2.2. 国内研究现状 3
1.3. 无人车运动规划与控制的研究现状 3
1.3.1. 运动规划研究现状 4
1.3.2. 控制研究现状 6
1.4. 本文的主要研究内容与结构 7
第二章 基于改进A*算法的无人车运动规划 9
2.1. A*算法基本原理 9
2.2. 仿真结果分析 10
2.3. A*算法的改进 11
2.4. 改进后仿真结果分析 12
第三章 基于PID控制算法的跟踪控制 13
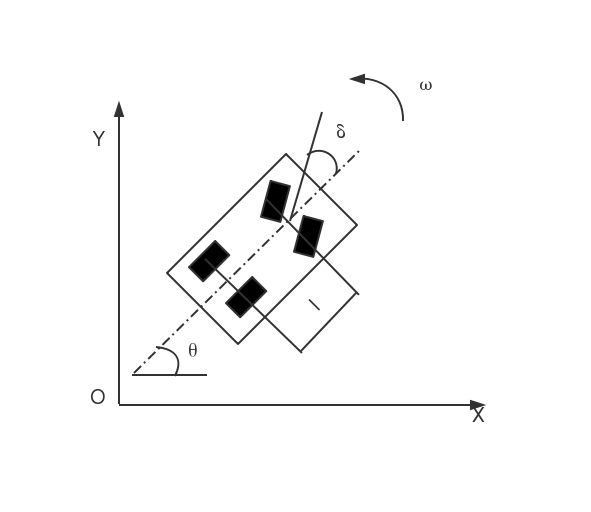
3.1. 车辆运动学模型的建立 13
3.2. PID算法简介 14
3.2.1. PID算法描述 14
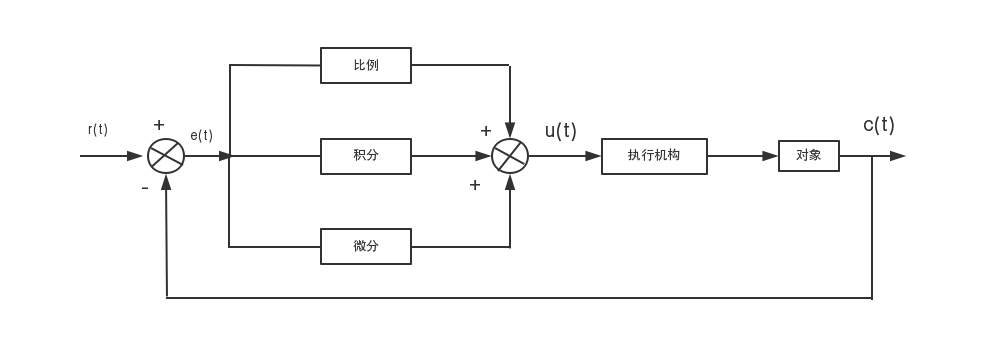
3.2.2. PID控制原理 15
3.3. PID控制器设计 16
3.3.1. 控制器设计要求 16
3.3.2. PID控制器设计 17
3.4. 仿真结果分析 17
第四章 总结与展望 21
参考文献 22
致谢 24
- 绪论
- 研究背景及意义
自1885年世界上第一辆汽车被德国工程师卡尔本茨发明至今的100多年内,汽车行业得到了迅猛的发展,近些年,不管是在人们生活出行还是货物运输方面,汽车都扮演者不可或缺的角色,足以可见,它已成为贯穿现代人生活与生产方方面面的最基础也是最重要交通工具中。由于汽车的使用变得越来越广泛,其问题也越来越明显:如环境污染、交通拥挤,交通事故等等问题。其中交通事故每年都会带来大量的伤亡事件,据统计,全世界范围内每年大约有120万人死于道路交通事故,其中由人为因素例如酒驾、疲劳驾驶、超速等引发的道路交通事故占事故总量的一半以上[1],同时造成的交通拥堵占全部碰撞事故类型导致的交通延迟的10%[2]。而自动驾驶技术因为其规划和控制的有序性及驾驶的灵敏性,可以良好的降低交通事故发生率,并缓解城市交通拥挤,有效的解决当下的交通问题。
随着机器人技术的快速发展以及智能化在各个领域的应用,无人车的自动驾驶技术也得到越来越多人的关注,它是将机器人技术与车辆工程相结合,通过车载传感系统感知道路环境来规划出预设路径,并通过自动控制技术来控制车辆到达预定目标的技术手段。它可以同时提高车辆行驶安全性,增加道路空间占有率,降低汽车尾气对于环境的污染[3]。
无人驾驶汽车是一个复杂的系统,它汇集了自动控制、人工智能、计算机图像识别等高新技术,其中对车辆进行路径规划和运动控制是无人驾驶技术的重要环节。其中,路径规划是整体无人车决策控制规划系统的最上游模块,运动控制位于决策层下游,指导反馈控制用于对汽车的运行进行实际控制。本文将对路径规划和运动控制这两项技术展开研究。其中,路径规划是指,其中,路径规划是指计算出一个从起点到终点的最佳道路的行驶序列。无人车运动控制是对无人车运动过程中进行实时的控制管理,以达到使其安全地行驶于参考路径并到达目标点的过程。
综上所述,对无人车自动驾驶的路径规划及控制的研究有着重要的意义。
- 自动驾驶的国内外研究现状
发达国家早在上世纪70年代就已经对无人驾驶汽车进行了许多的研究,而我国对这项技术的研究具体要追溯到从上世纪80年代。经过国内外学者的不懈努力,无人车自动驾驶技术的研究已经取得了很大的进展,并已经大量应用于军事领域。国内外很多高校及汽车公司一直都在致力于对无人车的研究,仅从2010到2015的5年内,就问世了超过22000件与无人车自动驾驶技术有关的发明专利。如今无人车自动驾驶技术日趋成熟,无人车的普及也指日可待。
- 国外研究现状
据相关记载,美国是最早研究无人车的国家,早在上世纪60年代,美国的部分高校和研究机构就开始致力于人工智能的研究,在1973到1981年间,经过美国stanfoul研究所对人工智能的努力研究下,这个研究所在shanfordcart工程中首次使机器人达到了自主驾驶的效果。同样在这个时期,为使汽车的操作和控制性能水平得到一个较好的改进提升,美国Ohio大学的一些学者针对汽车在行驶过程中纵向跟踪控制的性能和拐弯时侧向跟踪控制性能的影响进行了一定的研究,且收获了不小的进步与发展。
到80年代,许多国家为了提高国防能力,将无人车自动驾驶技术应用于军事领域,因此无人车驾驶技术得到高速发展。当时,美国军方开始与美国国防部高级研究计划局合作,自主开展地面车辆项目的研究。这个项目成功地创造了一个无人驾驶机器人,但其在颠簸的路面上很难快速行驶。
20世纪90年代起,很多大学与公司联合起来进行对无人驾驶技术的研究,并取得了很好的成果。其中较为著名的是德国慕尼黑国防大学与奔驰集团研制出的智能车,它不仅可以在高速公路的环境中进行相对安全的道路跟踪,而且还可以进行其他更复杂的行为,比如超车等。它以自动驾驶速度可达到每小时160公里超过有史以来记录的最高速度。1995年,卡耐基梅隆大学制造了一辆无人驾驶汽车,它可以以无人驾驶的方式穿越美国东部和西部。且在实际行驶过程中,它能在诸多地形复杂的道路上进行高速稳定长距离的自主行驶。最后在这次实验中,它的总行驶路程已有上万公里之长。
到了21世纪,随着机器人技术的逐渐完善,对无人车驾驶技术的研究更上一层楼。最具代表性的当属谷歌公司,其对无人车自动驾驶技术的研究一直处于世界前沿。早在2010年,谷歌公司就研制出了7辆无人车,它们具有较高的感知能力和人工智能水平,可以自动识别行人、车辆等障碍物,甚至是信号灯。2014年5月,谷歌公司谷歌联合创始人谢尔盖·布林领导的创新小组又研发出了新一代无人驾驶的智能车,这种车没有方向盘,行驶决策完全取决于电脑操控。它通过在车顶上的可以高速旋转的64线雷达来扫描周围的障碍物,以计算车辆与障碍物之间的距离。这辆车目前还处在测试完善阶段中。同时其它国家也不甘落后,在2010年10月,由意大利帕尔玛大学研制的智能车ARGO试验车只用了极少次的人工干预,便用三个月行驶了一万三千多公里,从罗马出发成功抵达上海。无人驾驶车辆Made in Germany是由德国柏林自由大学研制,在整个自主驾驶的试验中,它成功从柏林勃兰登堡门出发,到达了柏林国际会议中心后,又安全完整地回到了出发点,这期间遇到了总计46个交通灯,并成功在两处环岛中进行了顺利绕行。正因为这段驾驶进程,足以称之为当今世界上最高水平的无人驾驶车辆。另外,奥迪的无人驾驶概念车也己经正式进行了山道行驶测试;西班牙圣塞瓦斯蒂安也高调推出了无人驾驶的出租车。
- 国内研究现状
国内对无人驾驶技术研究起步相对晚些,对于智能移动机器人研究起步于20世纪80年代,在1980年我国提出了“遥控驾驶的防核化侦察车”项目,哈尔滨工业大学、沈阳自动化研究所、国防科学大学三家单位对该项目进行了共同研究。在八五期间,北京理工大学、国防科技大学等五所高校进行合作,成功研制出了我国第一辆能够自主行驶的无人车测试样车——ATB-1,其行驶速度可以达到21km/h。
国防科学大学的无人驾驶技术研究与其他国内大学相比要开始得更早,在上世纪80年代,“自动驾驶技术”创新团队由贺汉根教授领导,经过不断努力,于1991年成功研发出了一辆无人驾驶汽车,但是它的行驶速度较低;;经过对速度方面不断完善,无人驾驶智能车在2001年已经达到76km/h;但是直到2003年,具有超车功能的无人驾驶智能车才研制成功,同时其速度最高已可达到170km/h;2006年国防科技大学将一代红旗HQ3应用于无人驾驶技术研究平台,使无人驾驶技术在微型化和可靠性方面有所进展突破;2011年7月14日,国防科技大学改造的改进型新红旗HQ3首次从长沙安全行驶到达武汉,完全自主地进行行驶286公里,这意味着我国的无人驾驶技术已经达到了世界的先进水平。
2012年11月24号,由天津军事交通学院自主研发出的军交猛狮3号无人驾驶智能车在津高速公路上进行实验,在整个实验过程中,它在高速公路的多车道上进行了多次变道与跟车等实验项目,成功完成了12次智能超车,21次被动智能超车,36次自主改道,总自主驾驶时常为85分钟,最终平稳抵达114公里外的目的地,顺利完成实验,这表明其技术以达到国际先进水平。
传统车企也从未停下对无人驾驶汽车的研发脚步。2016年4月17日,由长安公司研发的无人驾驶车从重庆出发,经过为期6天的行驶,最终到达2000km外的北京,同年的北京车展,北京汽车专门为参观者提供了一块单独的基地,供其体验无人驾驶。北汽无人驾驶车通过搭载毫米波雷达、高清摄像头、超声波传感器以及定位导航系统,实现路径跟踪、障碍物规避等无人驾驶技术。
- 无人车运动规划与控制的研究现状
无人车是一种庞大的复杂系统,其涉及领域包括光学计算、人工智能、自控等等。而路径规划与运动控制是无人驾驶汽车在其自主驾驶过程中的关键技术,其中,路径规划是运动控制的前提,只有规划出期望的路径,再由运动控制系统对无人车进行实时控制,无人车才能稳定地行驶于规划路线并安全到达目的地。
- 运动规划研究现状
运动规划的定义为:在复杂的外部环境中,根据无人车行驶之前设定好的标准和限制,规划出一条可以满足预设要求的,并且可以跑通的最佳路线。根据对无人车预设路径周围环境的把握程度路径规划可分为两类:基于无人车整个行驶环境的全局路径规划,又称为静态规划;基于无人车行驶过程中传感器不断反馈车辆周围信息的局部路径规划,又称为动态规划。算法的设计是路径规划的核心内容,目前,关于路径规划所研发的算法有很多,根据这些算法的不同特征,可将其分为传统算法、图形学算法以及智能仿生算法三类。
- 传统算法
传统路径规划算法包括人工势场算法、模拟退火算法、禁忌搜索算法等。
- 人工势场法是将运动物体在环境中的运动假设成该物体在引力斥力场中从初始点到达目标点的行进来规划路径。详细地说,自动车辆前进的动力是由其周围的交通元件(包括障碍车辆),交通线路标记以及行驶方向施加在其上的类似力的影响的组合[4]。在算法中将目标点视为对在引力场中运动的物体具有吸引引力的点,障碍物视为对在力场中运动的物体具有排斥力的点,这样,运动物体被在力场中具有引斥力的点的作用下逐渐靠拢目标点。然后通过求环境对运动物体产生的合力来控制物体的运动以规划出其运动路径。利用该算法规划出来的路径既安全又平滑,可以让汽车稳定前进,但是容易陷入局部最优的问题。
- 模拟退火算法是一种寻求最优解的算法,最早是由N.Metropolis等人提出的,于1983年由Kirkpatrick进行进一步的改进,并被引入到组合优化领域。该算法与物理中热量和动能的原理息息相关-分子达到恒温即处于相对稳定状态,对应图像中的最大值或是极大值。在设计算法时,优先选取一个高温作为出发点,改变自变量的值,计算新动能的期望值,若是差异小于零,则意味着分子运动减缓,朝着稳定状态发展;若是差异为正,那么则要选取随机数,以一定的概率接受或是拒绝这一新的起点,通过逐步迭代,最终寻求到稳定值(最大值)[5]。
- 禁忌搜索算法是一种全局逐步寻优算法,它属于一种亚启发式搜索算法。从一个初始可行解出发,向一系列的特定搜索方向并可以实现让特定的目标函数值变化最多的方向移动,再由选择机制挑选出最合适的解作为当前解。为了防止挑选出的解只是局部最优而并非全局最优的事件发生,在算法运行过程中加入一个禁忌表来记录已完成的优化过程,这样就可以一定程度上避免出现上述问题,而去搜索其他新的解,最终实现全局优化。
- 图形学方法
图形学法在环境模型的基础上进行路径规划。图形学的主要方法有:栅格法、c空间法、voronoi图法等。
- 栅格法是用编码将环境进行单元分割成一系列网格,并用序列号码来表示所处环境的信息:存在障碍物的单元格标记用1表示,无障碍物的单元格用0表示。以此为基础进行路径规划。栅格法使用简单、普遍性高并且容易实现。但该算法中栅格大小的选取是一个很重要的因素,栅格较小,可以得到更加清晰的环境信息,但会储存更多的信息,增大搜索复杂程度,降低路径规划效率;反之,栅格较大,储存信息减少,搜索复杂程度就会降低,但是环境信息就会变得较为模糊。
- c空间法又称可视图空间法[6]。c空间法是将无人车从起始点出发到达目标点的过程中所遇到的障碍物视作规则的多边形,将经过所有多边形顶点(不经过障碍物)的起始点与目标点的连线作为寻找路径的范围来进行路径规划,画出这些可行连线,最后筛选出最优连线作为行驶的路径。c空间法内容较少,便于理解,能够轻松求出最短路径。但灵活性不强,如果起始点与目标点发生变化,就必须重新构造视图,较适合全局路径规划。
- voronoi图法与实际生活联系紧密,可以用于多种领域-识别星群和星系群,比如由太阳和其它恒星所确定的星系;用于生物学、生态学和林学:不同植物间生存竞争关系的研究与模型;几何学:多面体的“好的”三角化方案;气象学:根据几个点的降雨量测量来估计一个地区的平均降雨量;机器人技术:在有障碍物情况下的路径规划。维诺图可以通过不同算法实现平面分割,典型做法是Delaunay三角剖分算法[7]。构造步骤为:首先选取大量的随机点,然后连接这些点形成Delaunay三角网(满足三角形外接圆内部不包含三角形的顶点等一系列条件),将三角形的外接圆愿心相连结,以最大空圆准则作检查,得到维诺图。对于本文所研究的无人驾驶汽车而言,维诺图具有实用价值。可以将随机点视为障碍物,仅仅考虑平面元素,不考虑高度,将其放在二维坐标系内,就形成了不同大小的散点。设计路径的核心是既要避开障碍物又要找到最佳的路径[8]。构造Delaunay 三角网和维诺图形成了“禁区”,在余下区域寻找路线即可解决问题。
- 智能仿生算法
人们观察大自然中动植物的某些生存行为并从中获得启示,对仿生学进行深入研究,把从这些行为中获得的启示转化为可以解决某些困难问题的算法,达到优化目标的目的。目前智能仿生算法有遗传算法、蚁群算法和神经网络算法等。
- 遗传算法[9]是一种模拟达尔文生物进化论的遗传学机理和自然淘汰的生物进化过程中的计算模型。它应用广泛,在人工智能领域拥有重要地位。遗传算法是按照基因遗传学原理而实现的一种迭代过程的搜索算法。[10]优点是在充分发挥自身迭代的优势的同时,与其他算法相结合,缺点是运算效率不高。
- 蚁群算法是一种迭代寻优算法[11],该算法受到蚁群觅食的启发,在无人驾驶中,用于在已知目的地的前提下,寻找最短路径。设计算法时,设立目的地的位置,同时确定衡量蚂蚁觅食时的特性指标,主要的指标包括:信息启发式因子、期望启发式因子、蚁群数量和信息挥发因子。信息启发式因子值越大,意味着 “蚂蚁”更可能走前人走过的道路,因为缺乏多样性而错过最优解的概率就会变大;期望启发式因子值越大,蚂蚁倾向于优先选择期望距离最短的路径,可能最后得到的是局部最短路线而不是全局最短路线;蚁群数量意味着迭代次数,越多结果就越精确;信息挥发因子越大,那么后来的蚂蚁得到的信息素的量就越少,所以选择就更加多样,得到最优解的可能性变大。利用软件和设计好的代码,最后得到的结果展示在图形当中,可以直观地看到轨迹以及路线的平均值最后达到的稳定值(即最小值)。
- 神经网络算法[12]是一种表现很优秀的仿生智能算法,它是根据动物物神经网络行为而模拟出来的,能够将分布式并行信息处理进行实现。神经网络的学习能力较为优秀,但是将其用于路径规划时并不能获得理想效果,原因在于数学公式很难描述复杂的环境,不过该算法结合其他算法来进行路径规划已经成为研究的热点。
- 控制研究现状
轨迹跟踪控制是自动转向过程中的基本问题之一,是实现汽车自动驾驶的关键技术,它要求无人驾驶车辆通过自动控制可以沿着通过环境信息预设好的路线安全且无差异地从起始点到达目标点,无人车运动控制主要存在两个问题:第一个是无人车在控制器的作用下所行驶的实际路径与预先规划的参考路径存在偏差;第二个是控制器所反馈的信号存在滞后、滞环等特性,如何保证智能车辆系统实时性、稳定性的要求[13]。轨迹跟踪控制算法主要包括纯跟踪控制、前馈—反馈控制、模型预测控制等。
- 纯跟踪模型控制是一种基于几何原理的计算方法[14]。它可以将无人车当前所处点与目标点连线之外的弧形轨迹部分计算出来。其算法本质是把自身所在位置与预瞄处期望位置两者横向所存在的误差转化为控制量进行控制。由于该算法得出的车辆转弯半径与方向盘转角存在一一对应关系,故算法实施过程中车辆的动力学模型可以不予考虑。纯跟踪模型控制算法的优点在于简单、直观。缺点在于其预瞄距离受多参数控制而不稳定。
- 前馈—反馈跟踪控制方法近年来使用较多。它是由前馈控制系统和反馈控制系统组成的复合控制系统,其中前馈控制系统的作用主要针对实际路径与参考路径曲率的不同的进行改进,反馈控制系统主要将车辆前进过程中实际轨迹与预设轨迹的偏差反馈给系统以控制输入量,来减小行驶偏差和模型误差对车辆按参考路径行驶的影响,达到车辆能安全且平稳地行驶在参考路径上目的。该系统既降低了对前馈控制模型精度的要求,又减少了反馈控制的负担。
- 模型预测控制也叫做滚动时域控制[15],控制系统根据其非线性动力学模型预测出将来一段时间内的输出,根据求解带约束的最优控制问题,来保证系统在未来一段时间内的跟踪误差最小,模型预测控制由三部分组成:第一部分是在短时间内可以很好地描述系统动态的预测模型;第二个是对预测模型的预估值与测量值比较而产生的误差进行修正的反馈校正;第三个是采用滚动式有限时域优化策略来在线滚动优化未来一段短时间的控制输入滚动优化算法。该控制系统适用于不易建立精确数学模型且存在约束条件的控制系统,对解决无人驾驶车辆在髙速和冰雪等复杂路面下的路径跟踪控制问题具有独特的优势。[16]
- 本文的主要研究内容与结构
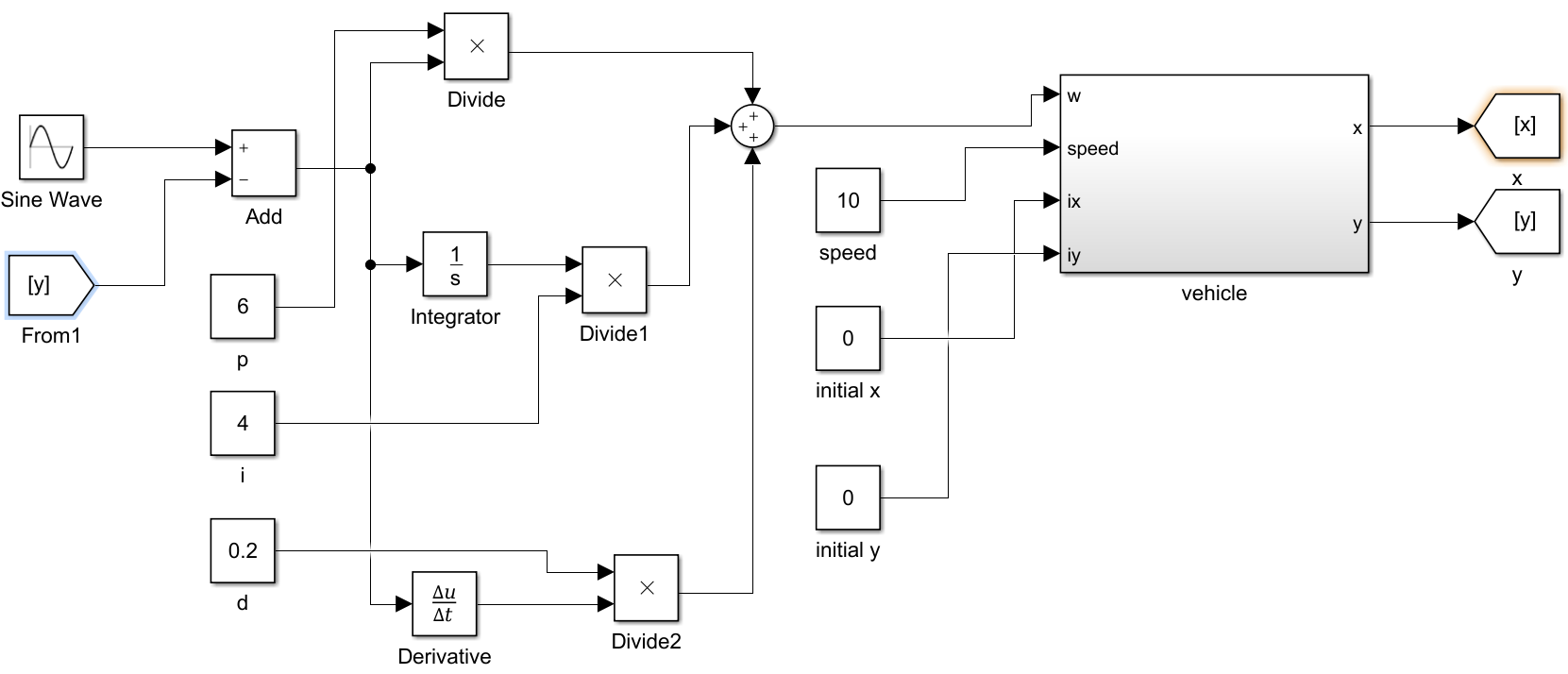
本文主要研究对象为无人车自动驾驶中的路径规划与运动控制两个关键技术,对于路径规划,首先对传统A*算法进行优化,使其规划出的路径平滑以便于无人车行驶,并将优化的算法应用到路径规划中,在MATLAB中进行单障碍物与多障碍物的模拟;在运动控制方面,采用传统但应用广泛的PID控制算法对无人车进行跟踪控制,设计一个PID控制器,并在MATLAB/Simulink上进行不同速度下的仿真实验。最后给出结论,指出文章需要改进的地方。文章的结构如图1.1,其主要内容如下:
第一章主要介绍了课题的研究背景及意义、无人车在国内外的发展现状和关键技术,并在最后写出了文章的研究内容。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: