虚拟交通三维场景中车辆运动仿真研究毕业论文
2021-11-25 23:19:14
论文总字数:58880字
摘 要
本文利用Carsim软件构建了汽车动力学模型,将之导入UE4软件后实现了模型在虚拟现实中的仿真。其后对数种不同路段上汽车的运动方法进行详细的建模分析与仿真,利用A*算法对车辆路径进行规划,最后利用Yolov3算法实现了对仿真过程的目标识别。通过完成以上目标,初步完成了一个无人车仿真系统。
关键词:UE4;无人车;A*算法;Yolov3算法
Abstract
This paper uses Carsim software to build a car dynamics model, and imports it into UE4 software to realize the simulation of the model in virtual reality. Afterwards, detailed modeling analysis and simulation were performed on several different car movement methods, using A * algorithm to plan the vehicle path, and finally using Yolov3 algorithm to achieve target recognition in the simulation process. By completing the above goals, an unmanned vehicle simulation system was initially completed.
Key Words:UE4; Unmanned vehicle; A* algorithm; Yolov3 algorithm
目 录
第1章 绪论 1
第2章 模型与虚拟场景的构建 2
2.1 汽车模型的设计与构建 2
2.2 场景模型的构建 3
2.3 场景的构建 4
第3章 无人车的运动方法设计 6
3.1 直行控速 6
3.2 变道行驶 7
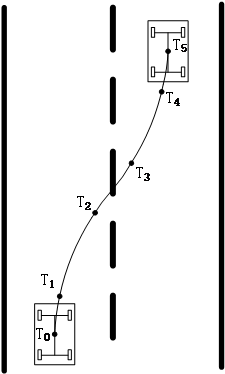
3.2.1 车辆变道简析 7
3.2.2  段分析 7
段分析 7
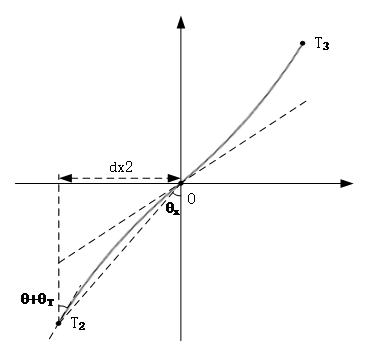
3.2.3  段分析 8
段分析 8
3.2.4  段分析 9
段分析 9
3.2.5 车辆变道仿真 10
3.3 利用A*算法规划路径 11
3.3.1 A*算法原理 11
3.3.2 A*算法在仿真过程中的改进与实现 12
3.3.3 其他避障策略 13
3.4 十字路口转弯 13
3.5 叉道行驶 15
3.6 环岛行驶 17
3.7 前方遇人 19
3.8 超车行驶 21
3.9 另一种车辆行驶方式 23
第4章 获取虚拟驾驶视频及进行路面识别 27
4.1 获取虚拟驾驶视频 27
4.2 使用Yolov3算法进行路面识别 27
4.2.1 Yolov3算法原理 27
4.2.2 制作Yolov3训练集 29
4.2.3 仿真结果 29
结论 31
参考文献 32
附录 34
附录A 34
附录B 37
附录C 40
致谢 75
第1章 绪论
近年来,无人车的设计在世界范围内出现了一股热潮,不少地方展开了对无人驾驶的研究,本次毕业设计也不例外,试图通过虚拟现实构建模型的手段实现对无人驾驶的仿真。
无人驾驶顾名思义不需要人驾驶车辆,对无人驾驶的研究有利于多个方面,降低运输行业的成本、在达到一定精度后可以减少交通事故的产生、提高人们的生活品质等。
无人驾驶同时也涉及到了多个层面的研究,基础的汽车动力学、对速度、方向等进行控制的控制理论以及机器视觉层面的图像识别等。
国内外关于无人驾驶的发展这里我主要从两个方面进行阐述,其一是无人驾驶车辆的运动控制[1],另一则是车辆在行驶过程中的目标识别技术[2]。无人车的运动控制是一种典型的多输入——多输出复杂耦合动力学系统[3],主要可以分为纵向控制与路径跟踪控制来进行考虑。无人驾驶的纵向控制实现目前主要存在PID控制、LQR控制、模型预测控制、滑块控制等方法;其路径跟踪控制则根据构建的系统模型不同而有所细分,例如几何学模型系统下主要采用纯追踪算法,运动学模型下主要使用链式变换、模型预测控制,动力学模型下主要采用PID控制、滑块控制等手段。而对于目标识别技术,目前主流的算法都运用到深度学习,利用神经网络完成图像的目标识别。
除了以上两个方面之外我认为还要提到虚拟现实的发展,因为本次设计主要是由虚拟现实仿真完成,目前我国虚拟现实技术主要应用在游戏、影视、房地产、医学等行业领域,就国外而言,美国在计算机模拟和可视化成果对科研和企业创新影响最为深远,欧洲重点强化领域研发,日本则在娱乐应用上处于领先[4]。使用虚拟现实技术对车辆系统进行开发,是可以模拟出现实中的道路、时间、天气、周围风景以及交通流量等各种事物 [5] 、还可以通过虚拟现实仿真对传感器等设备进行准确性的验证[6]等,这是虚拟现实运用中的一大优点,同时使用虚拟现实进行仿真的还可以用于研究如何减少现实中事故的发生[7]等。另外,现如今使用虚拟现实进行无人车辆仿真多数采用Unity3D软件[8],该软件是与UE4相类似的一款引擎类开发软件,因此本次毕设采用UE4进行也是一种创新。
本次毕业设计的主要目的有四个,将汽车仿真软件Carsim构建的模型与UE4软件进行对接、完成场景的建模、完成汽车在不同路段的运动方法设计以及完成虚拟驾驶的视觉处理。基于上述目的,与其完成目标如下:1.完成模型对接之后构建出直行、十字路口、叉道以及环岛道路;2.在完成上述模型的基础上完成多种路段的车辆运动方法设计;3.考虑到Yolov3算法的快速性,能够1秒处理十张以上的图片,初步决定使用Yolov3算法完成图像识别部分[9]。
第2章 模型与虚拟场景的构建
2.1 汽车模型的设计与构建
本次毕业设计的基础建立在UE4软件能够使用Carsim建立的车辆模型之上,基于参考文献的阅读,得知在UE4软件中存在能与Carsim进行对接的插件Carsim Vehicle Dynamics [10],于是在其商城中下载此插件,并对插件中的一些函数进行修改从而实现了两款软件之间数据的对接。实现对接的具体步骤如下,先于Carsim软件中创建车辆模型。在Carsim软件中建立新的数据集,选择车辆型号,这里我选择的是D-class中的sedan型号的仿真车辆,模型选择生成为UE4可用的simfile文件,自行更改车辆参数,并添加适当的车辆控制,例如添加车辆初始车速等,这样一来便完成了Carsim中的车辆运动学模型构建。下图为Carsim中构建好的车辆模型及部分参数。
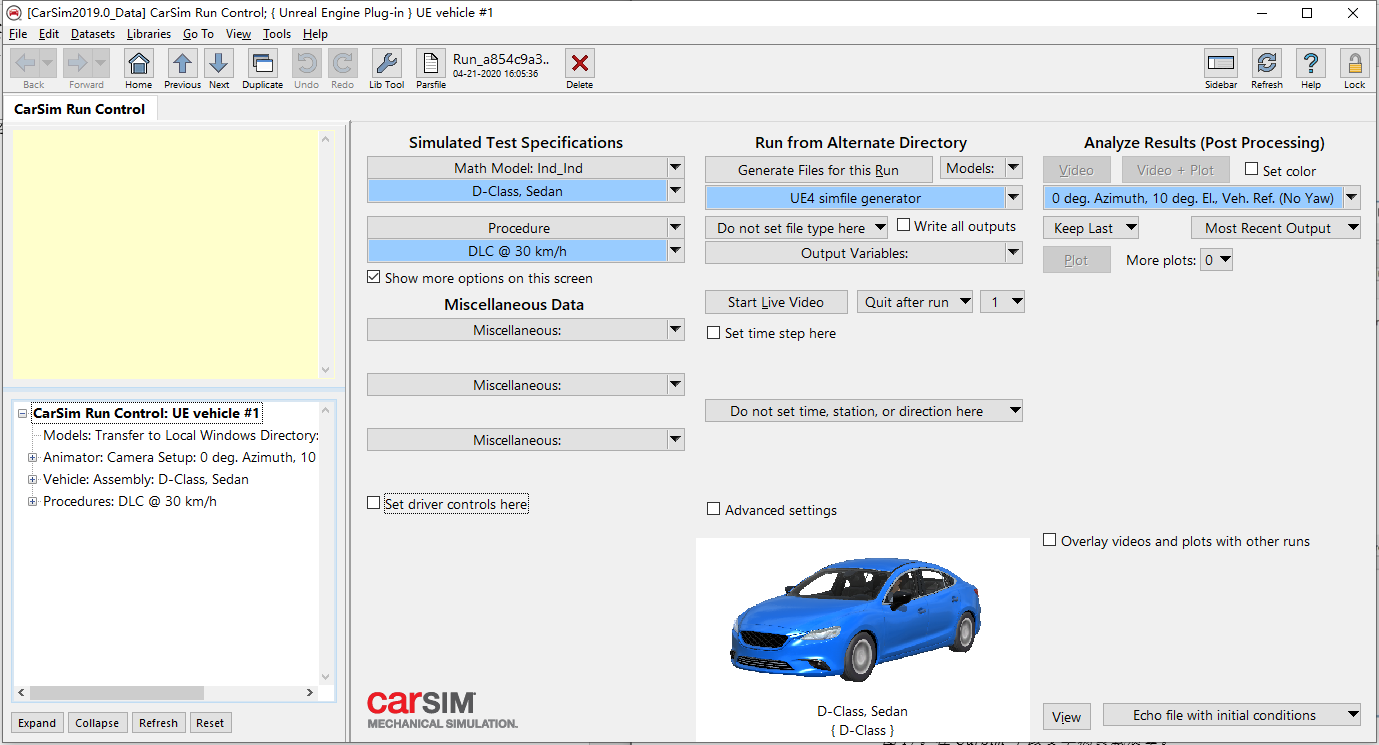
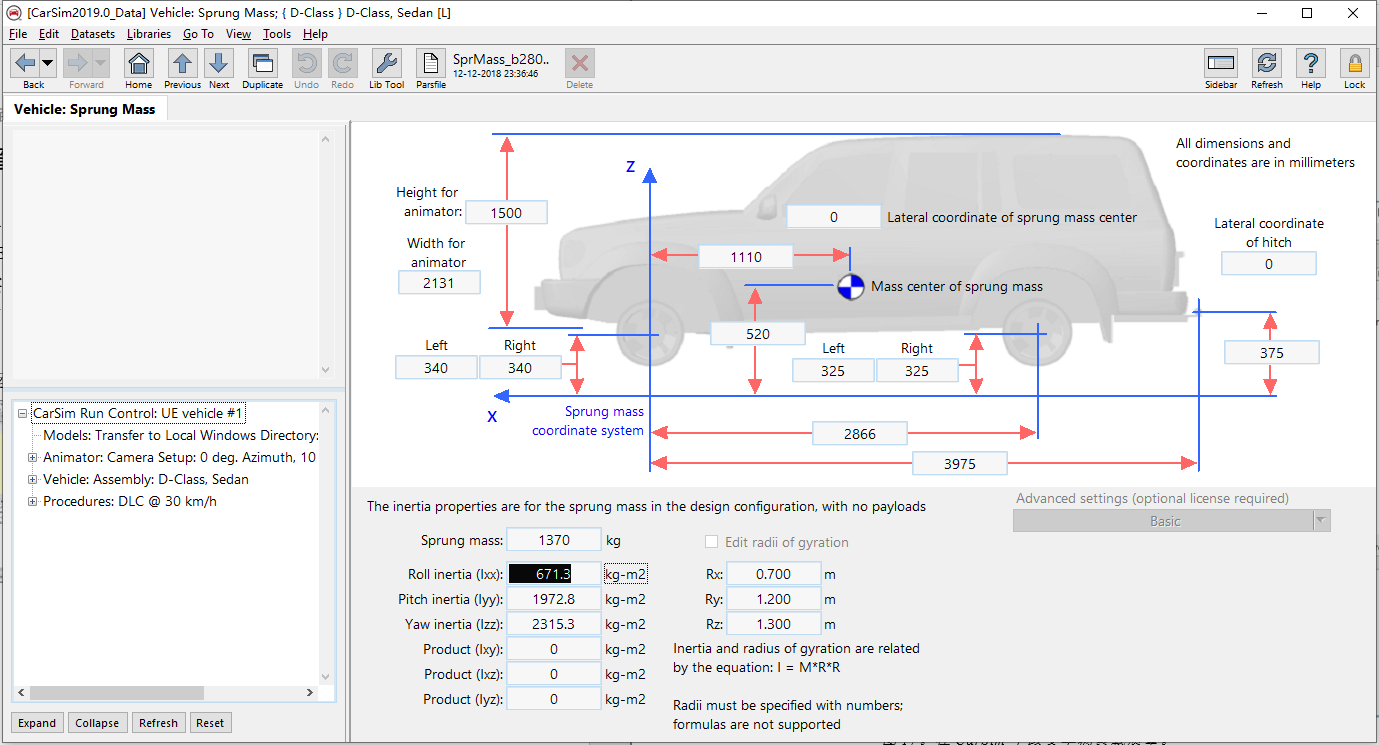
图2.1 构建的Carsim模型及其部分参数
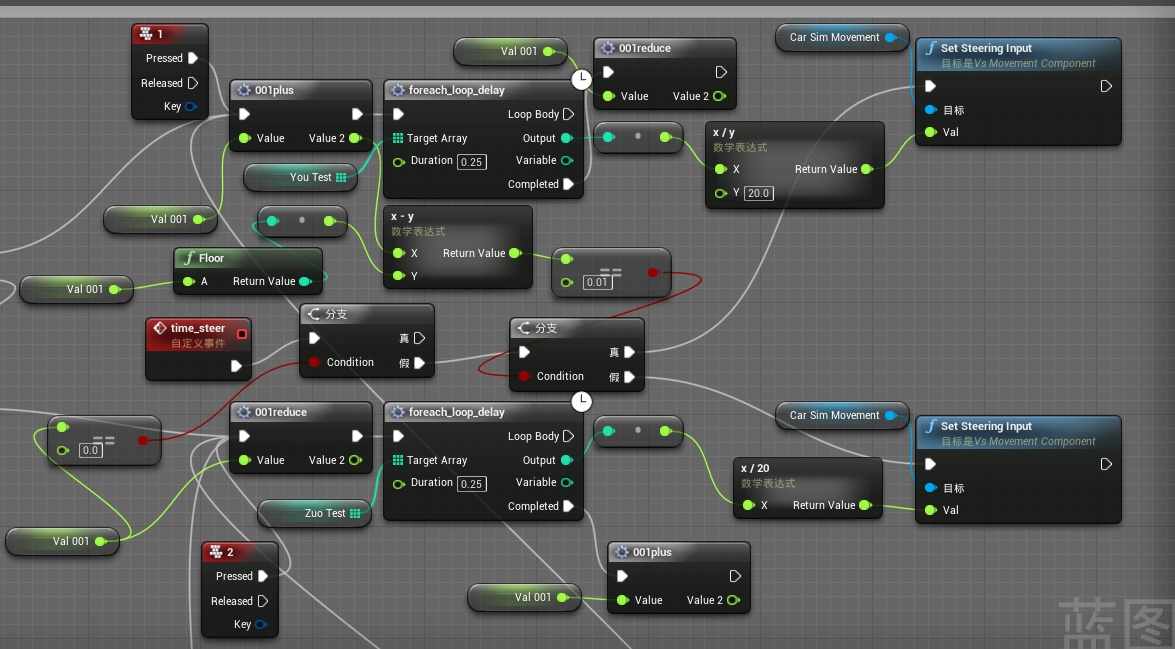
完成Carsim软件中的模型构建后在UE4软件中新建一个空的工程,之后的仿真都会在这个工程中完成,新建一个CarsimPawn类型的蓝图模块,因为安装了Carsim Vehicle Dynamics插件,所以这个蓝图模块就可以通过Carsim软件中生成的simfile文件实现在UE中运行Carsim的汽车模型,将之后的第三章中提到的建好的汽车模型附加于其上,即完成了汽车模型在UE4工程中的构建,接下来利用UE4的可视化蓝图编程以及在VS中自行编写的程序,在该模块的蓝图界面进行程序的编写,即可完成对汽车模型的控制,下图所示即为UE4中的汽车模型及其控制界面。


图2.2 UE4中的汽车模型及其蓝图控制界面
2.2 场景模型的构建
在本次设计中共完成了直行控速、车辆变道、根据A*算法设计路线行驶、十字路口拐弯、叉道行驶、环岛行驶、车前遇人行驶与超车行驶多种车辆不同的运动方法,通过这些不同车辆运动方式的组合即可完成任务中所说的百种车辆自主运动方法。
为了实现以上所说的多种车辆自主运动方式,本次毕业设计中所需要的模型至少包含车辆、直行道路、十字路口、叉道、环岛、路障、红绿灯等模型,因为根据文献[11],我认为各个路段可以分开考虑,可以把不同路段看成是坐标系中的不同区域进行分析。
在UE4中要得到一个物体模型的可以通过以下流程实现。
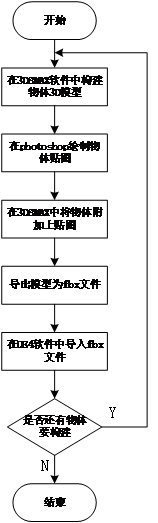
图2.3 在UE4中构建物体模型的一种方法
在对要建立哪些模型进行分析:1.道路存在四种:直行道路、十字路口、叉道以及环岛;2.由于存在超车,所以需要两辆车模型;3.存在前方遇人情形,则至少需要一个人体模型;4.利用A*算法进行避障,则需要障碍物模型。除开以上所述模型之外,还需要部分完成整体场景所需的模型,可以采用UE4商城中提供的各种模型与仿真工程中添加的方式来完成。
下图所示为构建的车辆模型,因为还需要一辆车用于超车的实现,所以采用更改车辆的表面颜色为黄色的方式实现。
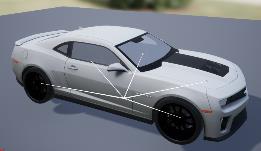
图2.4 构建的车辆模型
以下则为构建的不同道路模型,不同道路的参数分别为:a) 直行道路单段的长度为20m,总宽度为14m,单条车道宽度3.5m;b) 十字路口,长宽均为36m;c) 叉道分为两段,一段是普通的直行道路,另一段为分叉段,分叉段长度为30米,分叉之后的直行道路偏离原直行道路20m;d) 环岛的圆环道路参数是内径为10m,外径为30m。
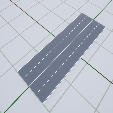
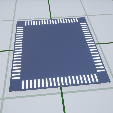
(a) (b)


(c) (d)
图2.5 不同道路模型:(a)直行道路,(b)十字路口,(c)叉道,(d)环岛
2.3 场景的构建
在完成了3dsmax里的模型建立之后,再在UE4的工程中完成整体道路的构建,这个部分较为简单,这里要完成场景构建大致分为两个步骤,第一步是构建仿真工程中的地形,第二步是将导入的模型拖入场景中加以装饰。对于第一步,使用UE4中的地貌工具构建地形并附加材质即可,第二步则是将相应的物体拖放至想要的位置或者是直接赋予其坐标即可,如下图所示即为整个道路场景的远视图。
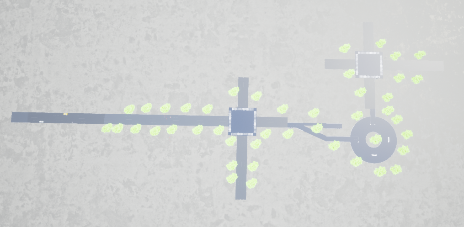
图2.6 构建的总体道路场景
第3章 无人车的运动方法设计
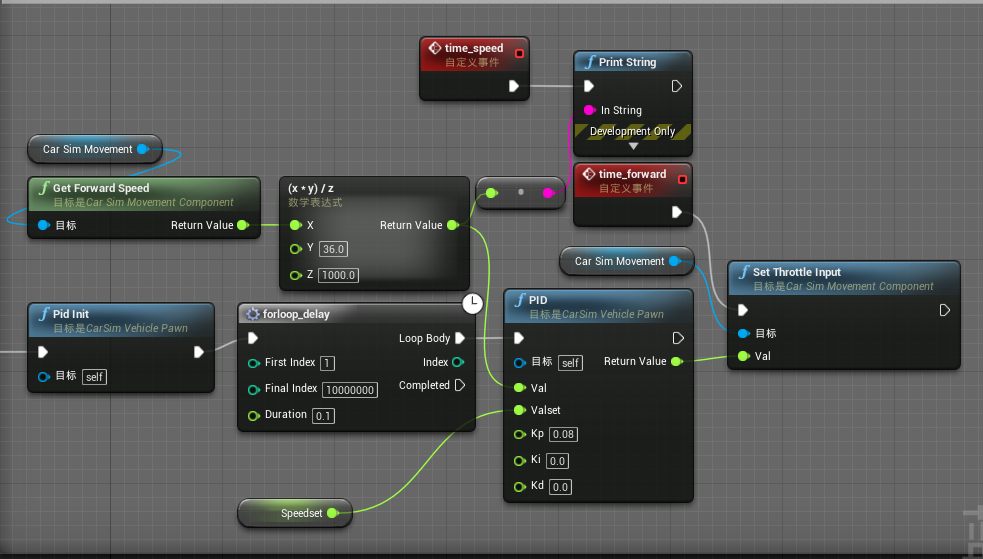
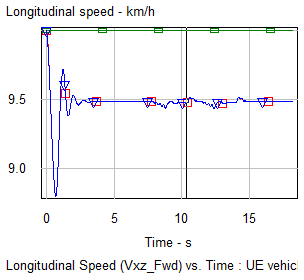
3.1 直行控速
为了使车辆在行驶过程中能以稳定的速度前行,必须用程序加以控制,因为Carsim最多给予模型一个初始速度,后续的速度还需控制。
请支付后下载全文,论文总字数:58880字
相关图片展示: