采用单侧电磁驱动的单轴主动磁悬浮轴承的分析与控制外文翻译资料
2021-12-16 23:12:54
英语原文共 7 页
2014年 电气和电子工程师协会 / 美国机械工程师协会 高级智能机电一体化(AIM)国际会议
贝桑松,法国,2014年7月8日至11日
采用单侧电磁驱动的单轴主动磁悬浮轴承的分析与控制
作者Haruna Kanematsu, Shinji Wakui, and Yukinori Nakamura
Haruna Kanematsu来自东京农业大学工学研究科,地址日本东京都小金井2-24-16 Naka,电话184-8588(电子邮件:50013645109@st.tuat.ac.jp)。
Shinji Wakui和Yukinori Nakamura来自东京农业技术大学工程学院,地址日本东京都小金井2-24-16 Naka,电话184-8588,日本(电子邮件:{wakui,yukino-n} @ cc.tuat。ac.jp)。
摘要:涡轮分子泵(TMPs)是在封闭空间中创造真空环境的设备,含有主动磁悬浮轴承(AMB)。为了减小TMP的尺寸和成本,本文提出了单轴AMB单侧电磁驱动器的设计。在传统的单轴AMB中,电磁铁(EM)设置在电枢盘上方和下方,而本设计仅利用设置在上方的电磁铁,并将永磁体(PM)附接在转子的顶侧和底侧以产生磁力。本文通过仿真和实验对所提出的单侧电磁驱动AMB进行了分析和评估,还考虑了由于TMP的姿态产生的特征变量。
- 梗概
涡轮分子泵(TMPs),用于半导体光刻设备,加速器和电子显微镜,可以在管道中产生真空。由于TMP的涡轮叶片高速旋转,腔室中的空气分子被弹出。TMP的转子由轴承支撑。尤其是球轴承和主动磁悬浮轴承(AMB)通常用于TMP。滚珠轴承相对便宜且易于使用。另一方面,由于转子因磁力而悬浮着,AMB有无油,无污染,防尘和免维护的优点。然而,已知具有五轴AMB的TMP是昂贵的,因为需要传感器,控制器,两个电磁铁(EM)和每个轴两个驱动器。为了降低TMP的成本,仅沿轴向控制的单轴AMB已广泛应用。单轴AMB具有永磁体(PM),其将转子保持在中心。传统的单轴AMB在电枢盘上方和下方具有两个EM。但是,需要进一步降低TMP的成本。此外,高速旋转也需要TMP的结构较小。
因此,在本文中,我们参考[8]仅使用单侧电磁驱动开发单轴AMB。在开发的AMB中,为了降低TMP的成本和尺寸,移除了两个EM中的一个及其驱动器。此外,我们在TMP的顶部和底部安装PM环。PM环的力沿轴向向下压转子。在PM环的力作用下转子受压的情况下,EM的力拉动TMP的转子使转子悬浮。
其余论文的结构如下。在第二节中,通过与使用双侧电磁驱动的传统TMP进行比较,引出了所提出的使用单侧电磁驱动的AMB的机制。此外,简要介绍了所提出的TMP的控制系统。在第三节中,我们通过模拟和实际测量来分析EM和PM中的力。 除了分析EM和PM中的力之外,还考虑了所提出的AMB对稳定悬浮的控制。第四节考虑了仅使用单面电磁驱动的AMB的工业应用。其他,我们还注目于TMP的姿态问题。为了补偿姿态问题的影响,我们改变了控制因素。最后,结论在第五节中表达。
二,单侧电磁驱动
(1)单面和双面电磁驱动
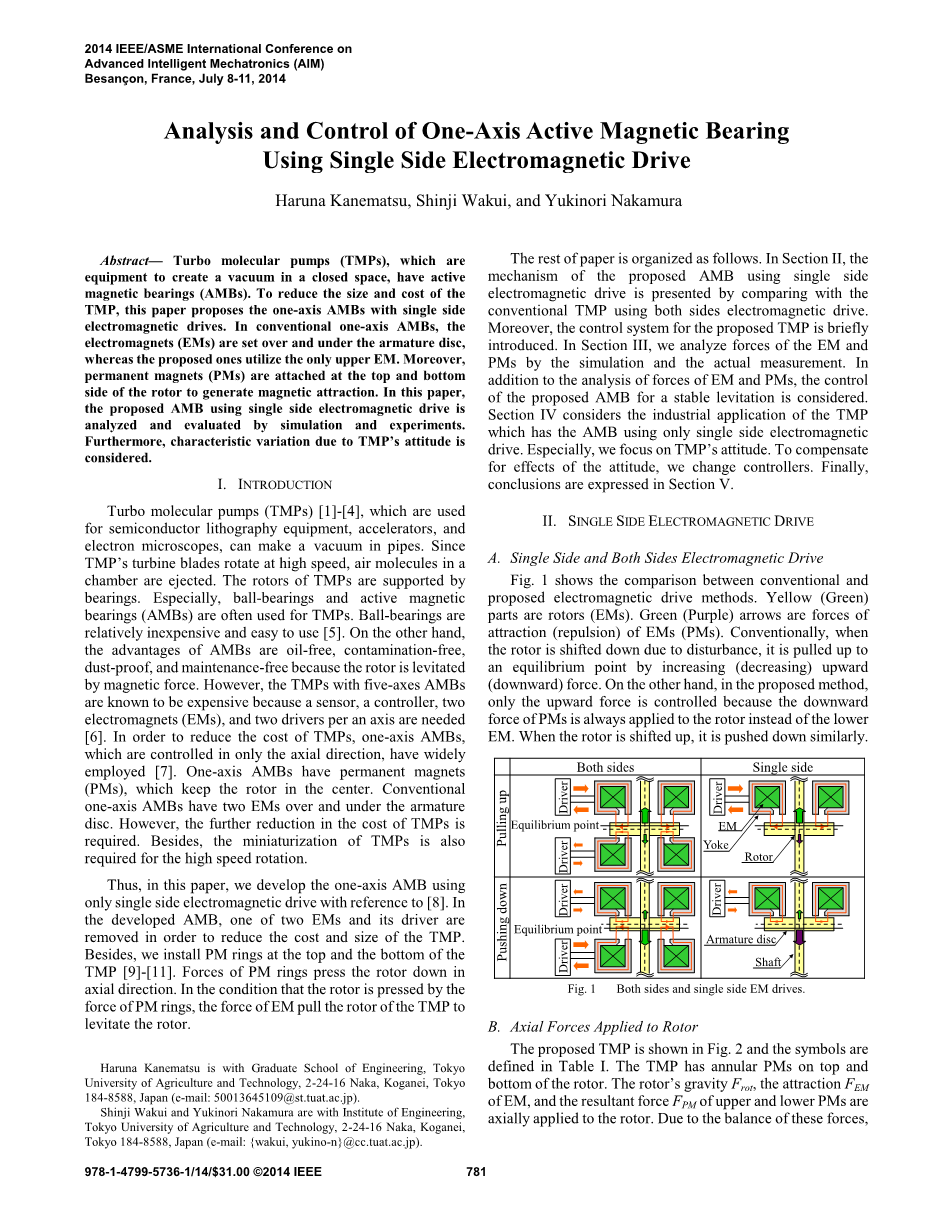
图1展示了传统和提出的电磁驱动方法之间的比较。黄色(绿色)部件是转子(EM)。绿色(紫色)箭头是EM(PM)的吸引力(排斥力)。传统方式中,当转子由于扰动而向下移动时,通过增加(减小)向上(向下)力将其拉到平衡点。而在所提出的方法中,仅控制向上的力,因为PM的向下的力总是施加到转子而不是下方的EM。当转子向上移动时,它同样被向下推。
- 作用于转子的轴向力
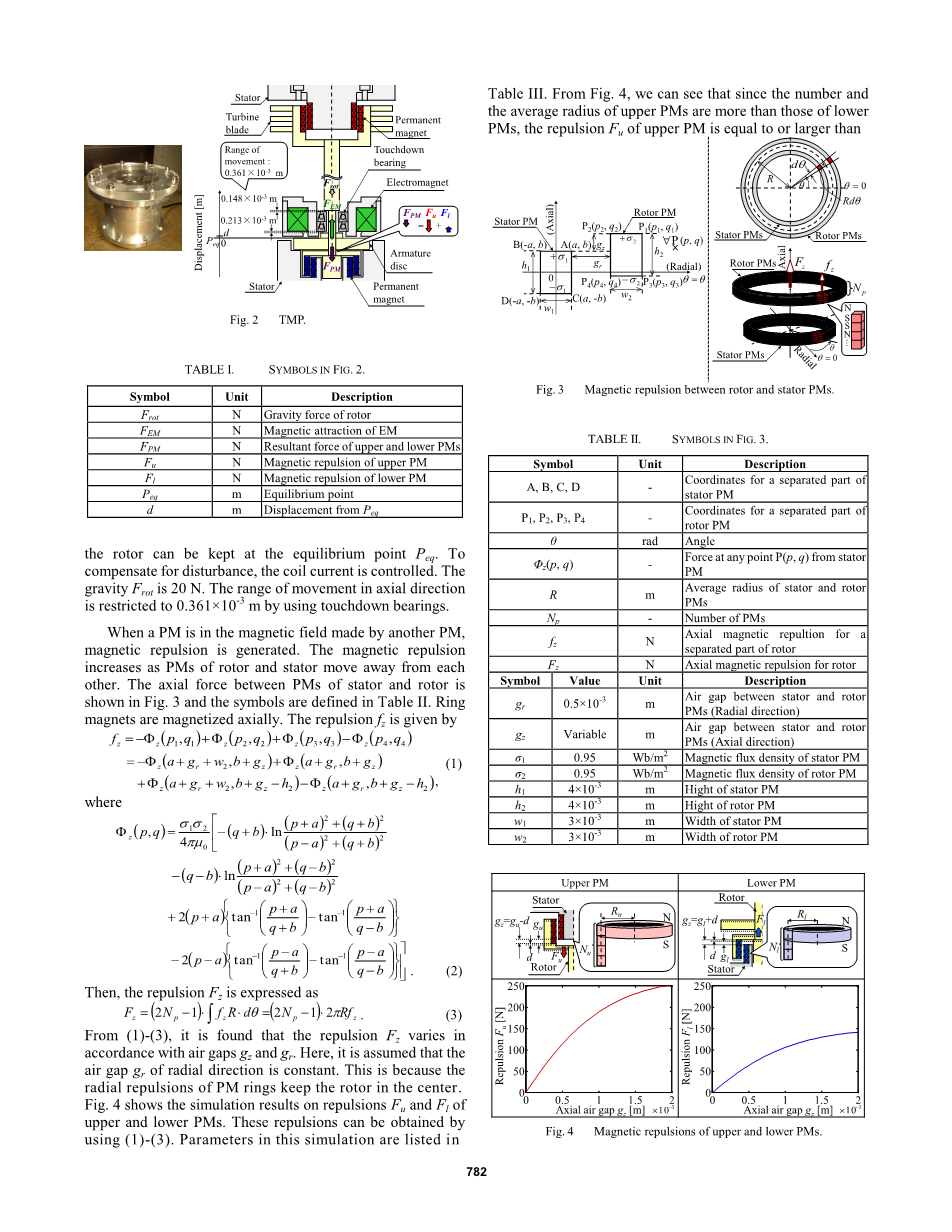
所提出的TMP如图2所示,符号在表I中定义。TMP中转子的顶部和底部设有环形PM,转子的重力Frot,EM的吸引力FEM以及上PM和下PM的合力FPM轴向地施加到转子上。 由于这些力的平衡,转子可以保持在平衡点Peq。通过控制线圈电流来补偿干扰。重力Frot为20 N。使用触地轴承可将轴向移动范围限制在0.361times;10-3 m。
当PM处于由另一PM产生的磁场中时,产生磁性排斥。随着转子和定子的PM彼此远离,磁性排斥力增加。定子和转子的PM之间的轴向力如图3所示,符号在表II中定义。环形磁铁轴向磁化。排斥力fz由下给出:
同时
然后,排斥力fz表示为:
从(1)-(3)可以看出,排斥力Fz根据气隙gz和gr而变化。这里,假设径向的气隙gr是恒定的。这是因为PM环的径向排斥使转子保持在中心。图4显示了上下PM的排斥Fu和Fl的模拟结果。这些排斥可以通过(1)-(3)得到。此模拟中的参数列于表III。从图4可以看出,由于上侧PM的数量和平均半径大于下侧PM的数量和平均半径,因此无论轴向气隙如何,上侧PM的排斥力Fu等于或大于下侧PM的排斥力Fl。
图5显示了上部PM的排斥力Fu,下部PM的排斥力Fl和合力FPM。两侧PM合力FPM定义为排斥力Fu和Fl之间的差异。从这个图中,我们可以发现合力随着转子向下移动,FPM增加。
电枢盘和EM之间的磁吸引力与电枢盘和EM之间的气隙的平方成反比。此外,磁吸引力与线圈电流乘积与线圈匝数的平方成正比。它是由磁阻引起的。提出的TMP的EM及其磁路如图6所示,符号在表IV中给出。从图6中可以看出EM的磁吸引力FEM可以写为:
同时
从(4)和(5)可以看出,EM的吸引力FEM根据线圈电流I和位移d而变化。EM的吸引力FEM如图7所示。从该图中可以看出,在线圈电流I恒定的情况下,EM的吸引力FEM随着电枢接近而增加。尽管在模拟中线圈电流I设定为恒定值,但实际上在转子的悬浮控制中会调节该电流(参见第二.(3)节)
- 转子悬浮控制系统
为了评估所提出的AMB的性能,我们进行了转子悬浮的实验。所提出的TMP的控制系统的框图如图8所示。符号在表V中定义。当转子悬浮在平衡点附近时,AMB可以被建模为线性模型。线性化模型由下式给出:
如图8所示,控制系统具有单轴AMB,驱动器和补偿器。补偿器由五个元素组成:环路增益、伪积分器、相位超前补偿器(PLC)和两个低通滤波器(LPF)。为了便于参数调整,伪积分器,相位超前补偿器和低通滤波器在数字信号处理器(DSP)中实现。
在控制系统中,有关转子位移d的信息被反馈给DSP。该命令被归零。在这些条件下,进行转子悬浮实验。图9显示了转子的位移。从这个图中,我们可以看到,在反馈控制之前,转子的位移为-0.213times;10-3 m。 上电后,位置回归到0米。因此,转子可以在平衡点Peq处成功悬浮。
三,力的测量
为了验证二.(2)小节中所示PM的合力FPM的计算,我们使用提出的TMP进行实验。实验装置如图10所示。在这个实验中,我们使转子连接一个测力计并且电流不会流到AMB中的线圈。然后,我们测量转子在运动范围内顶部,中部和底部时的力。 厚度计用于测量转子处于中间点时的力(d = -0.113times;10-3 m)。图11显示了从实验获得的测量数据与从(1)-(3)得到的理论曲线之间的比较。从这个图中,我们可以看到测量数据与理论曲线一致。因此,通过使用(1)-(3)可以精确估计PM的合力FPM。
- EM的力
为了验证EM的吸引力FEM的计算,我们在两个实验之后进行:首先,我们研究线圈电流I对吸引力FEM的影响。由于在该实验中转子不悬浮,因此位移d设定为-0.213times;10-3m。图12显示了实验装置。电流从直流电源流出。 线圈电流设置为0到1.2 A。为了测量吸引力FEM,我们将转子悬挂起来并使用测力计测量。图13显示了理论曲线和测量曲线之间的比较和FEM的测量值。理论曲线可以从(4)和(5)获得。在该图中,测量值和理论值几乎相同。
接下来,我们评估位移d对吸引力FEM的影响。在该实验中,通过使用二.(3)小节中所示的位置反馈控制来使转子悬浮。图14显示了实验装置。把命令设置为-0.021times;10-3至0.13times;10-3m,基于此条件,使用激光位移计测量位移。因为激光位移计的分辨率高于TMP中位置传感器的分辨率。图15示出了位移d与线圈电流I之间关系的实验结果。从这个图中,我们可以看到线圈电流随着转子向下移动而增加。通过使用图15中所示的结果,我们可以评估位移d对吸引力FEM的影响。通过将线圈电流I和位移d的测量结果代入(4)来获得FEM的估计值。图16示出了吸引力FEM和向下力的绝对值(即力FPM和重力Frot之和)。 从这个图中,我们发现吸引力的估计值与向下力的绝对值一致。因此,通过(4)和(5),可以精确地估计EM的吸引力FEM。
- 对TMP姿态影响的补偿
在工业场景中,TMP通常倒置在真空设备的喷射管上(见图17)。 TMP的姿态朝向影响磁轴承的特性。 因此,无论TMP的姿态如何,都需要稳定磁力轴承的控制系统。在下文中,我们首先研究TMP的姿态对控制系统的时间响应的影响。然后,我们考虑参数调整,使得无论姿态如何,时间响应都是相同的。 最后,我们评估姿态对频率特性的影响,并重新设计补偿器,以稳定控制系统。
- TMP姿态对时间响应的影响
图18显示了倒置设置与正常设置的比较。 如该图所示,当TMP倒置时,PM的合力FPM的方向和EM的吸引力FEM发生变化。 此外,在倒置设置的情况下EM的吸引力FEM小于正常设置情况下的吸引力FEM。
图19显示了转子悬浮和干扰响应的实验结果。在该图中,蓝色(黑色)线表示在正常(倒置)设置情况下的位移。在干扰响应实验中,选择对控制系统的干扰为X = 0.07V。从图19的上侧,我们可以看到即使TMP倒置,转子的位移也会聚到平衡点Peq。但是,转子的响应是不同的。例如,在颠倒设置的情况下的上升时间小于在正常设置的情况下的上升时间。这是因为控制系统的刚度根据TMP的姿态而变化。下一小节将解释这个原因的细节。
- 控制系统的参数调整
控制系统的刚度受AMB不稳定刚度km的影响,可以通过平衡点稳态电流I0和电枢盘与EM之间的气隙ge来求得。不稳定刚度km写为
通过代入(4)中的稳态电流I0和气隙ge,得到平衡点处的EM的吸引力FEM(I0,ge)。根据四(1)小节所示的实验结果,在正常(倒置)设定的情况下,稳态电流I0为0.67(0.51)A。气隙ge为0.29times;10-3m。 从(7)可知,正常(倒置)设定的不稳定刚度km为7.7times;105 (4.5times;105) N/m。因此,不稳定刚度km根据TMP的姿态而变化。
从图8中可以看出干扰X到位移d的传递函数可写为:
同时
注意,增益d(infin;)/X(infin;)对应于控制系统的刚度。从(8)可以看出,当AMB的不稳定刚度km<!--资料编号:[4802]



