一种容错控制基准的船舶推进系统外文翻译资料
2021-12-20 21:38:34

英语原文共 13 页
一种容错控制基准的船舶推进系统
Roozbeh Izadi-Zamanabadi*, Mogens Blanke
摘要
容错控制将故障检测和隔离技术与监控技术相结合,实现自动化在故障发展成故障之前对故障进行调节。而故障检测和隔离(FDI)方法在在过去的十年中,容错控制的扩展是一个相当新的领域。本文介绍了一种以船舶推进系统为基准的船舶推进系统。这应该是一个有用的平台,为新思想的发展和方法的比较。基准有两个主要部分元素。一种是开发高效的FDI算法,另一种是分析和实现自主故障调节。可以从作者处获得基准套件。(1999爱思唯尔科技有限公司版权所有。
关键词:容错控制;故障检测;故障处理;基准;自主监控
1.介绍
船舶推进系统的故障远非不可能发生的事件,许多故障已导致严重的损害和重大的资本投资损失。虽然安全性和可靠性在船舶自动化中至关重要,但不采用故障操作系统。相反,在个别机械关闭的情况下,采用安全系统原理。如果检测到局部故障。这种策略仅是局部最优的,例如,由于柴油机动系统中的传感器故障,原动机被关闭,常常导致船舶无法刹车。 在这一领域,故障处理的整体优化显然是一个有吸引力的选择。尽管在故障检测和隔离(FDI)方面存在着有趣的基准研究和工业应用(Blanke和R.J.Patton,1995年;Isermann和Balleacute;,1997年;Frank,1996年;Bennet和Patton,1997年),但关于自主容错控制的出版物很少。 (Blanke等人,1997年;Patton,1997年)。
本基准旨在提供一个具有高度行业相关性的现实和挑战性问题。这一问题给外商直接投资和自主监管带来了挑战。FDI的挑战包括对参数不确定性的鲁棒性,以及螺旋桨和船体阻力的非线性特性。容错控制部分的挑战包括重新配置控制器以适应严重故障。基准的两个部分可以单独研究。该基准旨在作为在容错控制范围内加强理论和技术的一种手段,并希望多个小组在国际成果公布方面共同努力,以及工业技术水平的提高。本文描述了基准,解释了问题产生的背景,并提出了统一评价结果的测试序列。
2.船舶推进系统
对各种FDI方法进行基准测试的例子是渡轮的推进系统。附录A包含与船舶有关的主要数据。推进系统的轮廓如图1所示。这个主要部件/子系统是:F柴油动力:一台柴油发动机,产生扭矩驱动传动轴控制输入为燃料指数y。
·轴动力学:轴加速度,取自柴油机和螺旋桨扭矩之间的差异。
·螺旋桨特性:轴速n、螺距theta;和水速决定螺旋桨的推力和扭矩。
·船舶速度动力学:由船体阻力和风浪外力平衡的螺旋桨推力。
·螺旋桨螺距和轴速控制器分别确定螺旋桨螺距和燃油指数。
·协调控制水平给出了轴速度和螺旋桨螺距的设定值。
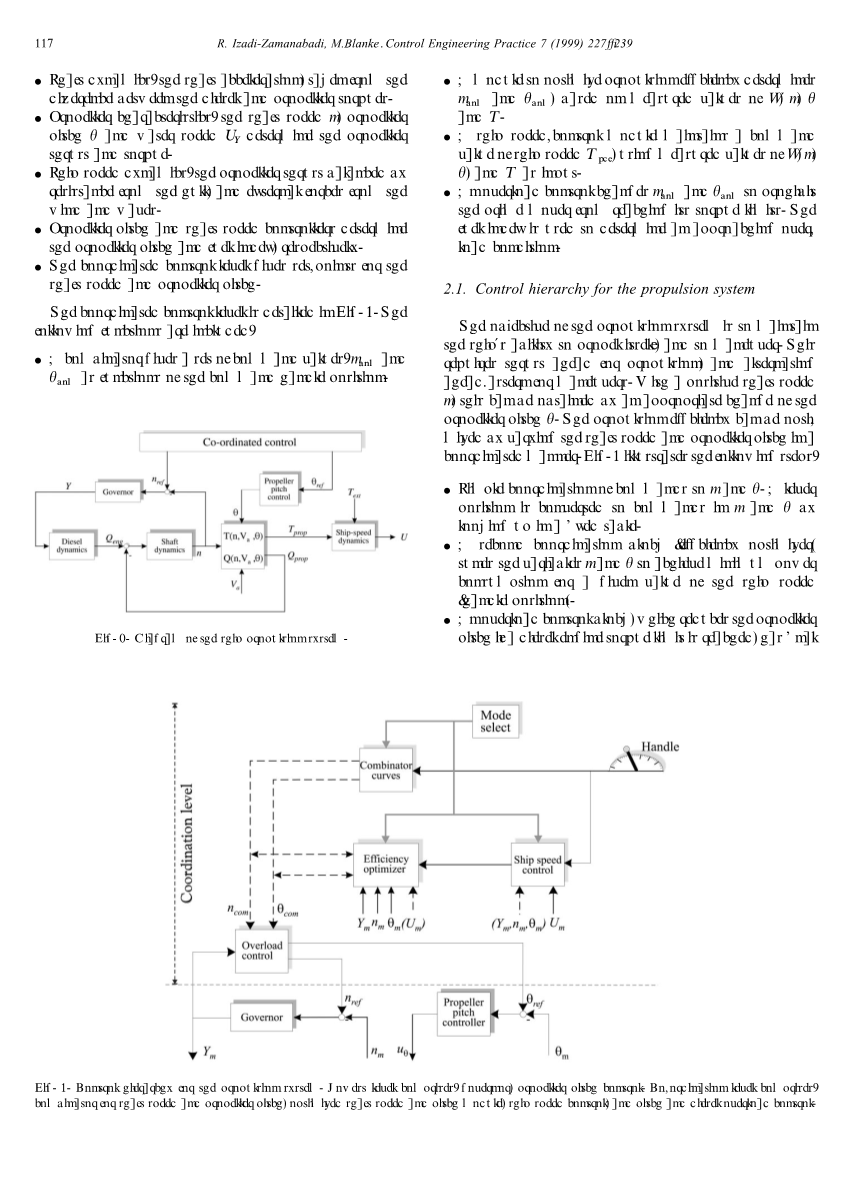
协调控制水平如图2所示,包括以下功能:
·组合器给出一组命令值:和作为命令句柄位置的函数。
·优化推进效率的模块确定和,基于测量值的Y、N、theta;和U。
·船舶速度控制模块使用测量值Y、N、theta;和U作为输入,保持船舶速度V的命令值。
·过载控制改变和禁止原动机无法达到其扭矩极限。燃油指数用于确定接近的过载状态。
图1 船舶推进系统图
船速动力学
轴力
螺旋桨螺距控制
柴油机动力学
节速器
坐标控制
2.1.推进系统的控制层次
推进系统的目标是保持船舶的推进能力和机动能力。这需要推进力向前,机动力向前/向后交替。轴速度为正时n,这可以通过适当改变螺旋桨螺距theta;来实现。通过协调改变轴速和螺旋桨螺距来优化推进效率。图2说明了以下步骤:
·简单地将命令协调到n和theta;。通过在固定的表中查找,将杠杆位置转换为n和theta;中的命令。
·第二个协调块(效率优化器)调整变量n和theta;,以实现给定船舶速度值(手柄位置)的最小功耗。
·如果达到柴油发动机扭矩极限,过载控制块将减小螺旋桨的位置,其最终命令超过设定点和发送到低级控制。
·最后一步是实现船在海上航行时的速度。
协调水平
组合曲线
船速
控制
手动
螺旋桨螺距控制
节速器
超载
控制器
效率
优化器
选择模式
图2推进系统的控制层次
最底层包括:调节器、螺旋桨螺距控制。
协调级别包括:轴速和螺旋桨螺距组合器,优化轴速和螺距模块,船舶速度控制,螺距和柴油过载控制 。
2.1.1螺旋桨螺距和轴速度控制
推进系统由两个基本控制回路组成,一个用于螺旋桨螺距,另一个用于轴速。 图3显示了一个更详细的下层架构的框图。
这包括各种饱和现象和轴转速和节距控制回路中的有限功能。参数值在附录B中列出。较低级别控制装置的输入为轴速度设定值,以及螺旋桨位置设定值。未知的输入是施加在船舶速度上的外力和摩擦力矩。测量输出为柴油机轴速度,燃油指数,螺旋桨螺距位置,船舶速度。
物理曲线
物理
曲线
控制器
节速器
动力学
燃料指
数限制
坐标控制
图3 下层架构的框图
3.故障场景
一般性故障的发生有多种原因。基准考虑了四个一般性错误,导致六个实际事件。故障列在表1中,并在下面进一步解释。它们的严重程度不同。有些是非常严重的,需要快速的故障检测和适应,以避免严重的事故,如果部件故障发生在一个关键的机动。检测时间和 因此,必须重新配置。其中一些故障是由于现有推进控制系统缺乏容错功能而造成严重破坏的实际事件。图3定位基准点的一般故障系统框图。
故障是:
(1)与螺距有关的故障:
:此故障可能是由于变桨传感器或其接口的电气或机械缺陷造成的; :此故障可能是由于变桨传感器或其接口的电气或机械故障造成的; :控制系统的(液压)驱动部分可能发生泄漏;实际上,通常在超压阀中。 (2)与轴速测量有关的故障:双脉冲传感器用于测量轴速度。考虑以下故障: 最大信号(一个上的EMI干扰拾音),最小信号(两个接收信号丢失)。
- 与柴油机有关的故障()。由于以下原因,总的轴扭矩可能低于预期:进气量减少、燃油进口减少或气缸不工作。
表1 基准中考虑的一般故障
|
结果 |
字母 |
类别 |
|
传感器故障 |
|
加性突变 |
|
液压泄漏 |
|
添加剂初期 |
|
传感器故障 |
|
加性突变 |
|
柴油机故障 |
|
乘法突变 |
为了确定故障如何影响系统运行,采用了故障传播分析方法(Blanke,1996)。这是一种层次化、自下而上的归纳分析方法,它显示了每个故障的最终影响、后果和评估的严重性级别。结果如表2所示。
表2 基准故障的后果和严重程度
|
故障 |
后果 |
严重度 |
|
|
减速 |
操纵风险 |
|
|
加速 |
碰撞风险 |
|
|
渐升的成本增长 |
速度变化 |
|
|
减速 |
操纵风险 |
|
|
加速 |
碰撞风险 |
|
|
柴油机超载 |
磨损减缓 |
3.1.外国直接投资要求FDI
设计要求如下,其中,
是特定控制回路中的采样时间;
检测时间();
传感器反馈故障(和);
初始故障 ;
。;
无输入。
时变外阻力来自天气和浅水是错误检测。外国直接投资应该对此不敏感。
·误检概率:。提供包括港口机动在内的无故障真实数据,以便对有关错误检测的算法进行实际测试。
·漏检概率:。由于故障严重程度高,可能危及船舶(及其船员)安全,因此在发生故障时不进行检测的概率应尽可能低。
·稳健设计:存在几种模型不确定性来源:由于增长(0增加到R(U)的20%),或由于海和风的外力变化(R(U)的10%),螺旋桨推力和扭矩的先验不确定性()和发动机摩擦(5%到8%),以及其他物理参数的一般不确定性,导致船体阻力R(U)缓慢增加。比例(2%美元)。外国直接投资对这些应该是强劲的。参数的后验数据可被识别并用于FDI。测量噪声见附录B。
3.2重新配置要求
故障处理应包括适当的步骤以适应基准故障。补救措施应主要使用协调级别的重新配置来适应故障。重新配置模式下的性能可能低于无故障条件下的性能。当切换到重新配置模式时,应避免大的瞬态。无需无碰撞传输,但这是一个理想的特性。
- 动态模型
本节描述物理系统的动力学。功能块是柴油机、螺旋桨和船身向前运动的动力学。
4.1 柴油机动力学
柴油发动机产生扭矩,由其燃油指数frac12;控制,以驱动轴。柴油机动力学可分为两部分。第一部分描述了产生的扭矩与燃油指数之间的关系。传递函数如下(Blanke,1981;Blanke和Andersen,1984;Fossen,1994,第246-257页):
(1)
其中q表示一个时间延迟(连续气缸点火之间的时间间隔的一半),表示增益常数,表示与气缸点火形成的扭矩相对应的时间常数。
(2)
该模型适用于两缸柴油机的稳态运行,在这种情况下可以忽略时滞。
第二部分是轴的扭矩平衡
(3)
是柴油发动机产生的扭矩,是螺旋桨动力系统产生的扭矩,是摩擦扭矩。
4.2 螺旋桨特性
可调螺距螺旋桨(CP)的叶片可以通过液压机构转动。螺旋桨螺距h可以从100%(全速前进)更改为!100%(全速后退)。螺旋桨推力和扭矩由以下双线性关系确定(布兰克,1981):
描述了当螺距为零时,螺旋桨产生的扭矩。值通常为名义运行时螺旋桨扭矩的5%。是水流通过螺旋桨盘的速度
(6)
U是船的速度,w是一个与船体相关的参数,称为尾流分数。系数是螺距h的复杂函数,在基准点上,通过在模型螺旋桨试验中测量的两组数据之间进行插值,计算出。图4和5以图形方式显示了对的不同音高值的依赖性。在这些图中,kt和kq是无量纲推力和扭矩系数。
其中D是螺旋桨直径,是水的密度。
4.3船舶速度动力学
以下非线性微分方程近似于船舶速度动力学:
描述船舶在水中的阻力,是一个负值。图6显示了两个给定载荷条件下作为速度函数的船体阻力。表示浪涌中的附加质量,为负。推力扣除t表示由于船尾螺旋桨产生的流量而造成的净推力损失。是来自风和波浪。是测量噪声。
- 控制系统层次
螺旋桨螺距和轴速的设定值根据所选模式计算。定义了以下模式(Izadi Zamanabadi和Blanke,1998年):
- 操纵方式(固定断点特性从手柄位置决定n和theta;)主要用于以下情况:如果靠近港口或驶离港口,在受限区域,或当需要最大机动能力时。
-
在长途航行或远洋航
资料编号:[4262]



