具有远程驱动机构的起重机系统,用于ACPF热室的氩气室外文翻译资料
2021-12-20 21:59:27
英语原文共 11 页
具有远程驱动机构的起重机系统,用于ACPF热室的氩气室
译者:黄汉斌
摘要
韩国原子能研究所(KAERI)的先进乏燃料调节工艺设施(ACPF)最近已成功翻新。这个改造项目的一个亮点是在设施的大气热室内安装一个小型氩气室。尽管起重机系统被认为是远程处理氩气室内处理设备所必需的,但是没有合适的商用起重机。这是因为为起重机的安装预留了有限的空间。此外,主从操纵器(MSM)是起重机唯一可用的维护方法,无法在有限的工作空间内到达。为了解决这台起重机设计中的困难,在这项研究中,设计了一种远程驱动机构,其中起重机系统的机械和电气部件是分开的,彼此远离地定位,并通过动力传动轴连接。这种方法有两个主要优点。首先,电气部件可以放置在MSM的工作空间内,因此允许远程维护。其次,在设计起重机的机械部件时,可以考虑和利用在所提出的设计中与起重机分开的电气部件及其电缆所占据的空间。这使得能够构造短的特殊起重机以最大化工作空间。此外,位于工作空间外的MSM机械部件设计为具有高安全裕度以确保耐用性。还基于绝对定位测量开发了精确的伺服控制系统。这让机械设备通过自动操作有更安全的性能。
1.引言
起重机系统广泛用于在工厂,建筑工地,码头和核电站中运输重物和危险物品。通常,速度,精度和安全性是工业起重机操作中最重要的因素,其中有效负载的摆动在运输操作期间降低所有这些。因此,深入研究的重点是尽量减少有效载荷的摆动。
关于工业起重机系统的维护,即使当要执行的工作处于危险的高海拔时,也可以通过直接访问来维护或修理故障单元。在诸如“热室”之类的特殊设施中,由于高放射性而无法直接进入操作人员,起重机系统因其能够远程处理材料和执行维护任务而被认为是必不可少的。在这种情况下,应限制起重机的最大速度以确保安全操作。热室起重机系统的远程维护是其最重要的设计要求之一。两种方法通常涉及热室起重机系统的救援方案。首先,损坏的起重机通过安装在上层维修室的辅助起重机通过舱门缓慢拖曳( Piolain等,2006)。在第二种方法中,将热室起重机系统移动到同一楼层上的相邻维护区域,然后操作员在去污后对故障单元进行手动修复(Bradley等,2004))。在这两种方法中,起重机系统需要多余的驱动器,使得它可以在辅助维护起重机下方移动,如在第一种方法中那样,或者在相邻的维护区域中移动,如在第二种方法中,当正常驱动线路发生故障时。与这些方法相比,本研究提出了一种现场更换方法,除了主从机械手(MSM)之外不需要任何特殊工具,因为它考虑到起重机可用的有限空间。
这里提出了一种特殊起重机系统的开发,用于小型氩气室热室,没有辅助提升系统来救援起重机。所提出的起重机设计的新颖特征如下:(1)在给定有限空间的情况下使用远程驱动进行可行的维护,(2)使用线性驱动机构进行精确定位,(3)模块化设计以便于维护, (4)运动和摄像机控制器的集成,以实现更高效的操作。在设计阶段,涉及热室材料处理设备的标准指南参考( ASTM标准C1554-11,2011 ),机械驱动也是如此,用于在热室设施中远程操作的系统(ASTM标准C1615-10,2010)。
本文的其余部分安排如下:在下一部分中,提供起重机系统的设计要求以及由于设施限制和操作条件而产生的问题。第3 节致力于描述起重机系统及其控制系统的设计。起重机系统的制造,安装和远程维护测试见第4 节。第5节总结了本研究的结论,并讨论了该领域未来研究的途径。
2 。起重机系统的设计要求
先进乏燃料调节工艺设施(ACPF)在韩国原子能研究所(KAERI)建造,作为实验室规模高温处理技术的示范设施( You et al。,2009)。ACPF是一个空气环境热室,由两个独立的区域组成,一个处理室和一个维护室,尺寸为8.1 米(长) times; 2 米(宽) times; 4.3 米(高),2.2 米( L) times; 2 M(W) times; 4.3 米(1H),分别。热室的壁由厚而重的混凝土构成,以保持操作区域中小于0.01mSv/h的剂量率。在热室的操作侧安装五对铅玻璃屏蔽窗。每个窗口工作站都配有一对MSM。通过使用纯铀和贫化铀,在APCF中成功地进行了几次批次操作。
即使处理设备,在高温(650操作 ℃)熔融盐浴,配备有一个内置的氩气供应系统以保持氩气气氛下在操作期间,它从严重遭受腐蚀问题,因为存在的氧气和水分,因为它安装在大气细胞中。因此,需要氩热室来改善处理设备的性能。作为热室改造项目的一部分,在大气热室内建造了一个小型氩气室(Yu et al。,2015)。
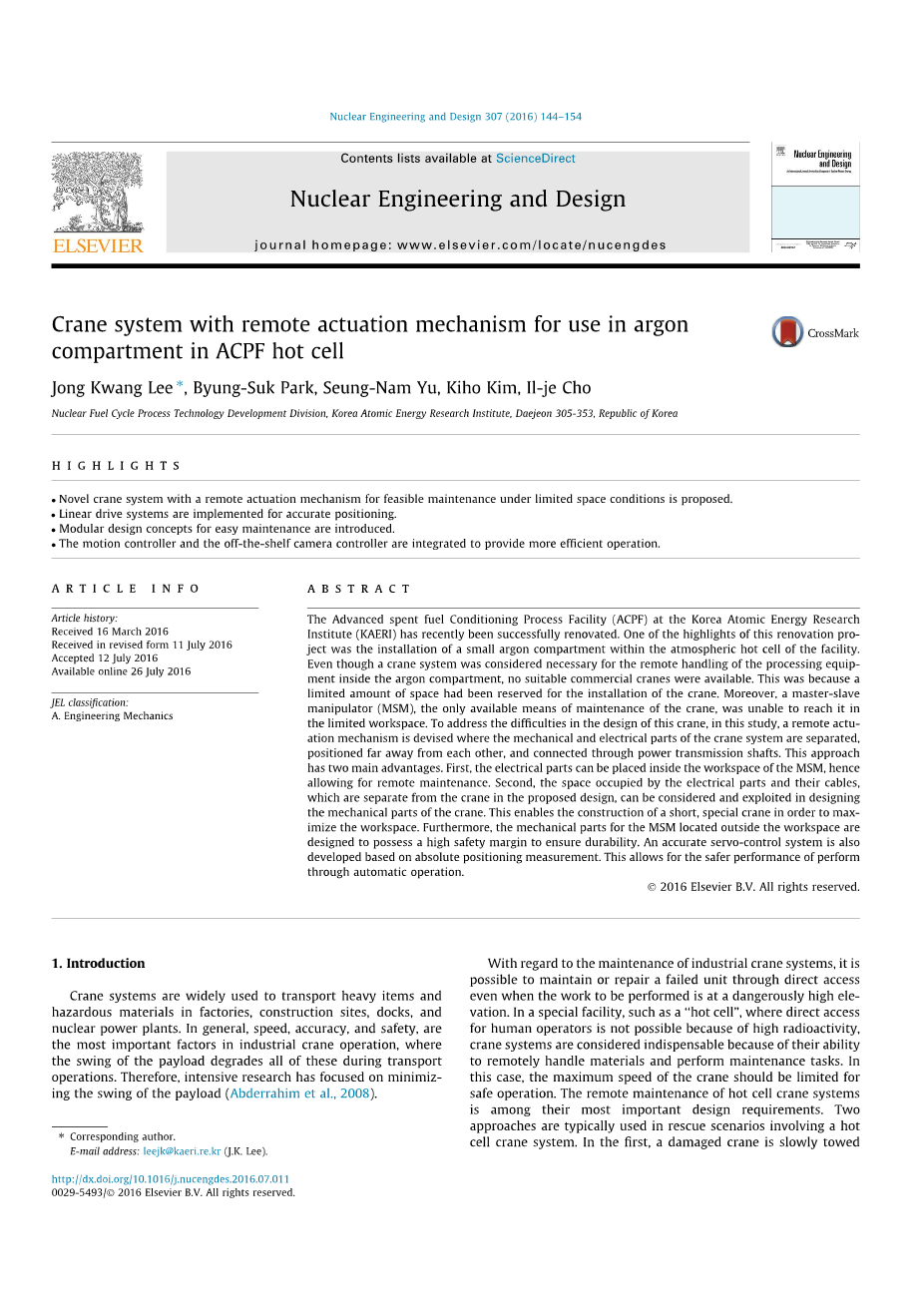
图1显示了翻新的ACPF热室。在右侧区域构建氩热室:三个现有(前,后,右)墙保持原样,降低底部以安装热室间转移系统,左壁和一个天花板被重建。氩热室的体积约为ACPF体积的10%,尺寸为1.7m (长) times; 2 米(宽) times; 2.7 微米(高)。
图1。经过翻新的ACPF热室。在大气热室内构建氩气室。
图2 显示了氩气室设计。现有的辐射屏蔽窗和两组MSM用于氩室,无需任何改动。相反, 需要在氩气室的天花板上安装负载能力为1.50 kN 的小型起重机系统,以执行过程设备的远程处理任务。由于现有的ACPF热室起重机(如图2所示)也需要在氩气池上运行,因此预留了非常有限的空间用于安装氩气室起重机。
图2。根据氩热室设计的横截面图。虚线表示在现有ACPF内部构造的氩气室作为隔室。
氩热室起重机和MSM具有相互维护的方式。也就是说,起重机应该用于维护MSM,而MSM是起重机维护的唯一方法。例如,起重机应安装在MSM上以分离损坏的从机械手。因此,由于气室空间的限制而产生的第一个设计要求是起重机的最大高度不应超过300 毫米。此外,由于工作空间有限,MSM无法到达起重机; 因此,起重机无法进行任何维护。这导致了第二种设计要求,由此需要实际的,可实现的策略来维护起重机。此外,由于通过屏蔽窗观察设备时的手动操作可能由于不准确的感知而导致误操作,因此起重机的第三个设计要求是它应该像机器人设备那样准确地移动。
3 。远程起重机系统的设计
基于上述设计要求开发了一种特殊的起重机系统。该设计的主要特点包括使用远程驱动机构设计可通过MSM轻松维护的小型起重机,用于精确运动的线性驱动机构,易于维护的电气部件的模块化设计以及使用适当尺寸的设计,商业成熟的组件,以确保耐用性。
3.1 。远程驱动机制
通常,桥式起重机的电驱动单元在高海拔处直接连接到机械驱动单元,例如轮子或电缆卷筒。然而,这种配置对于本研究中考虑的氩热室起重机是不合适的,因为起重机保留的空间有限以及MSM的范围限制。为了找到这个起重机设计问题的最佳解决方案,我们做了两个假设:
(1)电气部件(电机和传感器)比机械部件更容易受到设备故障的影响。
(2)如果机械部件具有高安全裕度,则可以容易地提高其强度和耐久性。
基于这些假设,设计了一种远程驱动机构,其中起重机系统的机械和电气部件是分开的,彼此远离地定位,并且通过动力传动轴和锥齿轮连接。如图 3 所示,由伺服电机,位置传感器和限位开关组成的电气部件在MSM的工作空间内降低到位。它们将电力传输到安装在天花板附近的机械部件。即使此配置无法提供最佳解决方案由于机械部件放置在MSM的工作空间之外,因此它可以成为一种广泛使用的实用解决方案,因为它可以更容易地提高机械部件的耐用性,从而最大限度地减少或消除机械部件在预期寿命期内发生机械故障
的可能性。
图3。具有用于动力传输的远程驱动机构的起重机系统的图。
3.2 。机械结构的设计
除了使用远程驱动机构之外,起重机的所有运动模块都配备有线性运动驱动机构,以提供精确的运动和绝对定位。图4 显示了行进系统及其跑道的机械结构。总的来说,起重机的重量由两个驱动轮和两个惰轮支撑。两个驱动轮通过驱动轴相互连接,用于运动同步; 两个小齿轮齿轮,与驱动轮轴向连接并与安装在跑道上的齿条齿轮配合,用于最小化车轮滑动而不需要任何负载支撑。如果意外的外力施加到垂直传动模块,它们可能导致起重机滚动偏移或脱轨。为了防止这种情况发生,在车轮下方安装了四个滚轮。
图4。行车系统的跑道设计。
如图5所示,横移系统从操作者的角度向前/后方向移动小车提升机,并且其支撑框架设计成在最大有效载荷下具有足够的结构强度。横移系统的设计方式类似于典型的直线运动系统:安装在工作台上的台车提升机在由滚珠丝杠驱动的梁架上滑动。因此,它还具有精确的运动特性和摩擦力小的特点。
图5 还示出了小车提升机的详细设计,其关键设计特征是使用滚珠花键。两个花键螺母插在蜗杆的两侧; 因此,由滚珠花键传递的扭矩用于使蜗轮和链轮旋转,彼此轴向连接,这使得提升机的钩子上下移动。值得注意的是,横向运动 - 由滚珠丝杠驱动的提升机的线性运动 - 不会干扰由滚珠花键驱动的提升运动,因为花键机构提供几乎无摩擦的线性运动同时允许构件同时传递扭矩。
图6 示出了起重机系统的三维(3D)计算机辅助设计(CAD)模型。与工业桥式起重机类似,它由三个运动模块组成:行走系统,横移系统和提升系统。主要区别在于使用垂直传动模块,其中传动轴由铝制外壳包围以防止碰撞损坏。起重机的电气部件位于远程操作区域,MSM可以到达并更换它们; 因此,电气部件可远程维护。此外,电缆
资料编号:[4204]



