基于数字图像处理的光纤预制棒缺陷检测研究毕业论文
2020-02-23 21:53:37
摘 要
在工业上利用机器视觉技术检测石英棒缺陷的过程中,需要通过相机获取图像并传输到计算机进行处理。在处理图像的过程中,因为光线通过石英棒时会产生能量上的衰弱,使得最终得到的石英棒边界出现模糊、缺陷等现象。本文提出一种基于霍夫变换的检测圆边界方法,并针对可能带来的霍夫变换计算量过大的问题作了一些算法上的改进。
在研究和发展的工程中,随着人力成本的提高以及人眼检测产品质量的种种不足,如视觉疲劳、判定标准不一,这些因素极大的限制了石英棒制造业的发展。本文提出了一种基于机器视觉的石英棒气泡检测与品质等级分级方法。主要研究内容为:⑴图像预处理,该部分包括图像去噪、阈值分割及图像二值化;⑵基于行程的连通域标记算法;⑶气泡特征提取,特征参数仅限于气泡的面积、位置、数目⑷依据特征参数判定石英棒品质等级。
霍夫变换是一种非常成熟的圆检测方法。然而,圆霍夫变换相当耗时。 本文对基于标准Hough变换的改进方法进行了改进。将三维Hough变换转化为两个二维Hough变换的组合。 渐变信息被视为累计阵列中投票权的值。SVM被用于识别假圆。实验结果表明,该方法可以提高检测精度和计算效率。
关键字:缺陷检测;图像处理;霍夫变换
Abstract
To detect defects in quartz rods using machine vision technology, we need to get the image through the camera and transmitted it to a computer for next processing. The energy of laser will be produced when it passed the object, which makes it difficult to identify the resulting quartz rod boundary. This paper proposes a method of boundary detection based on Hough transform circle, and improves the Hough transform of some algorithms for solving the problem of the large amount of calculation.
In research and development projects , With increasing human costs and various deficiencies about human eye detecting quality of products, such as visual fatigue, different judgement standards, which greatly limits the development of quartz rod manufacturing. This paper presents a method of bubble detection and quality classification of quartz rods based on machine vision. The main research contents are as follows: (1) image preprocessing, which includes image impatience, threshold segmentation and image binarization; (2) route-based connectivity domain labeling algorithm; (3) bubble feature extraction, characteristic parameter is limited to bubble area, location, number (4) According to the characteristics of the parameters to determine the quality of quartz rods.
The Hough transform is a very mature circle detection method. However, the round Hough transform is quite time consuming. This paper improves the improved method based on standard Hough transform. The three-dimensional Hough transform is transformed into a combination of two two-dimensional Hough transforms. Gradient information is considered as the value of voting rights in the cumulative array. SVM is used to identify false circles. Experimental results show that the method can improve the detection accuracy and computational efficiency.
Key Words: defect detection; image processing; Hough transformation
目录
摘要 5
Abstract 6
第1章 绪论 1
1.1国内外研究现状 1
第2章 图像预处理 3
2.1图像去噪 3
2.2阈值分割及图像二值化 3
2.2.1最大类间方差阈值选择法 3
2.2.2基于改进型位置自适应的阈值分割算法 3
2.3连通域标记 5
第3章 霍夫检测圆原理 7
3.1 霍夫变换预处理 7
3.2霍夫检测 8
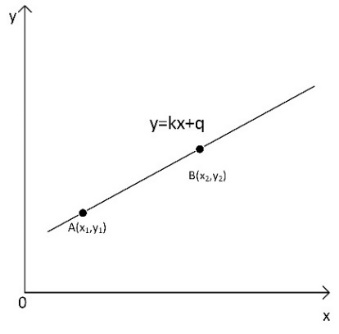
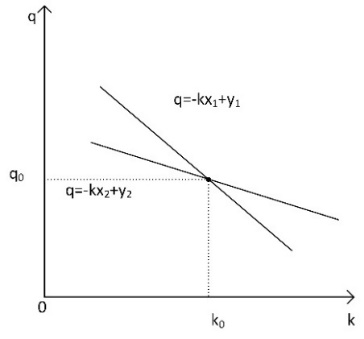
3.2.1 Hough转换检测线 8
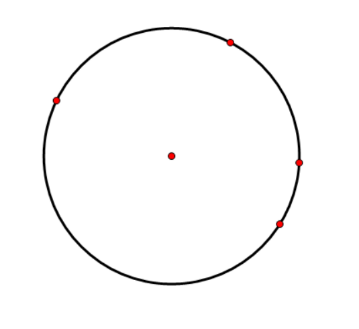
3.2.2 霍夫变换检测圆 9
3.3梯度信息 10
3.4改进型的霍夫圆检测 11
3.4.1 图像预处理 11
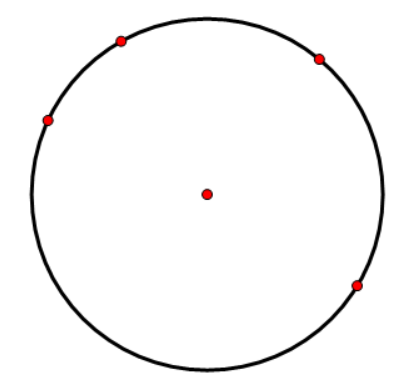
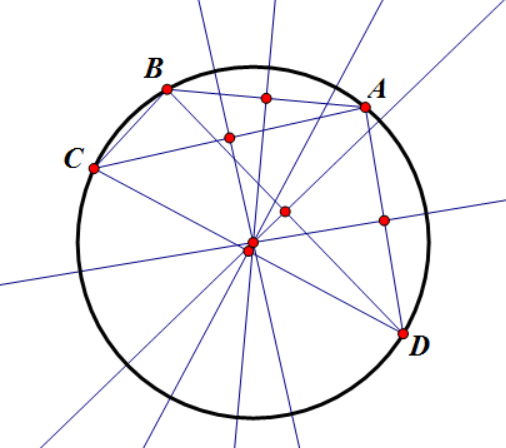
3.4.2 圆心确定 11
3.4.4 半径计算 11
3.4.4步骤四 12
3.5 假圈识别 12
第4章 光纤预制棒的检测及品质判定 14
4.1气泡的位置 14
4.2气泡的面积及数量统计 14
4.3光纤预制棒缺陷检测的LABVIEW实现 15
4.3.1 LABVIEW原理 15
4.3.2 视觉助手的检测运用 16
4.4 LABVIEW编程 17
4.5 Prewitt的检测输出 17
4.6依据特征参数判定石英棒品质等级 18
第5章 实验结果及分析 20
5.1.复杂度与计算量分析 20
5.2 算法分析 20
5.3 实验结果与分析 21
5.4算法缺陷分析 23
第6章 结语 25
参考文献 26
致谢 30
第1章 绪论
在研究使用机器视觉技术来检测石英棒缺陷时,发现当从侧面注入激光时,相机侧的石英棒边界可以被照相机清楚地捕获。但在弱光侧,由于激光在石英棒中较弱,在最终形象的圆圈内出现断点,模糊等现象。由于在后续处理中需要循环处理来说明有缺陷的情况,所以循环检测成为研究中的重大问题。在循环检测算法的研究中,Hough变换(HT)得到了广泛的应用,并推导出了多种改进的算法。 Leavers使用DGHT检测圆圈,魏毅在此基础上做了一些改进。金辉彩等采用梯度去除非点的方法减少计算量。经典的Hough变换用于通过投票机制将图像空间映射到抽象参数空间。图像空间中的每个像素都是目标对象,投票是目标对象。在具体的实现中,可以使用动态列表或C STL中包含的矢量容器来实现,因此本文着重介绍Hough变换中涉及的问题的计算。这种算法涉及大量的投票计算,占用存储空间大,运行速度慢。基于实际应用环境,本文改进了原来的复Hough变换
人力成本的提升加快了制造业由手工制造向机器自动化转型的进程。石英棒制造过程一般依靠工作人员人眼判定产品的质量,由于视觉疲劳、判定标准各异,极大增加了错误判定的概率,并且相比机械自动化,效率低下。因此,石英棒制造界迫切需要一种基于机器自动化的高效石英棒缺陷检测方法,并且针对同一批石英棒制定相同的检测标准,同时给出普适性的石英棒缺陷等级评价方法。当代机器视觉作为一个新兴的科学,自起步至今,迅速发展,相关学者已经创新性的将该技术应用于石英棒缺陷检测中[1]。但是工业生产中,产品反光、环境光线的干扰,使得该技术在应用于具体场景需做进一步改进。
石英棒产品的检测方法种类繁多,常用的有人工检测、激光检测、摩尔干涉定律[2],人工检测误判率高,激光检测易受环境光线影响,摩尔干涉定理检测速度慢,不满足工况下对系统实时性的要求。故本文提出一种基于机器视觉的速度快、准确率高的石英棒缺陷判定算法,并给出缺陷评价等级。
本文首先利用SNC-EM632RC索尼红外半球摄像机拍摄待检测的石英棒图像,该图像是指静止的待检测石英棒接受固定在侧边导轨上的运动着的平面激光束的照射所获取的横截面。首先,获取的图像经灰度化处理、图像除噪、图像二值化,得到黑白图像。然后,对二值图像扫描标记确定连通域。接着,依据连通域提取缺陷的特征参数。最后利用连通域的特征值判定石英棒品质等级。
1.1国内外研究现状
在研究的石英棒的过程中,我查阅了相关材料的国内外研究现状,以类似玻璃瓶为例。玻璃瓶具备漂亮的外表、良好的耐腐蚀性、材料的紧致性、循环使用率等诸多优点的玻璃瓶占据了医疗、酒业、食品等产品的包装行业的很大的比重。中国玻璃瓶历经30年持续发展,目前已成为世界上最大的玻璃瓶生产国[1]。但是传统的检测技术十分落后,对先进的生产力的使用起到了阻碍的作用,而国外的视觉产品价格高昂。通过机器视觉实现在线检测是目前最先进的玻璃瓶在线检测方式。由相机采集生产线玻璃瓶图像,通过视觉图像处理算法进行图像分析、缺陷提取和识别,由执行机构实现缺陷瓶的自动分拣。国外较早的开展了抑郁机器视觉方面的产品检测研究,目前机器视觉检测产品在国外的生产线上应用的非常广泛[2]。
美国工业动力有限公司开发了两种检测技术[3]:采用传感器技术空瓶验瓶机和采用摄像技术的全方位空瓶验瓶机,采用传感器技术空瓶验瓶机采用高分辨率的双基座扫描系统,包括圆周扫描和左右扫描,以检测瓶底的异物。此外还配合颜色自动补偿系统、检测微量残余液体的红外线检测技术、瓶口破损检测器、高瓶检测器等,对空瓶瓶底的厚度、密度、颜色变化、瓶口及残余液体等进行精确检测。采用摄像技术的全方位空瓶验瓶机利用光学系统、高分辨率摄像部件和自动变焦镜头,可检测瓶口缺陷,瓶壁内外,瓶底裂纹、污垢异物,瓶内胶膜透明物等。目前的检测速度每小时可以检测瓶口、瓶底7.2万个、瓶身4.5万个[4]。
国内的啤酒厂在技术方面与国外存在差距。近几年来国内比较有实力的啤酒厂花费昂贵的费用向国外购买这种检测系统。国外在这项研究方面做的较好的是德国,我国规模较大的啤酒制造厂商如青啤集团、华润集团、燕京啤酒集团等购买的基本上是德国的KRONES公司的产品。以前,针对视觉方面的研究国内主要注重于算法方面,均是针对特定检测对象来设计具体解决问题的算法。现如今,国内的一些研究单位和企业已经开始转向实用性机器视觉系统的开发研究[5]。
文献主要介绍了一种玻璃瓶自动检验机微机集散控制系统的总体实施方案[6]。对PC上位机与下位80C196单片机串行数据通讯方案的具体实施、PC计算机智能控制传动系统变频器运行的技术分析、以及各下位检测微机具体检测功能的实施思路分别进行了论述。从而为了玻璃瓶缺陷自动检验机微机控制系统的总体技术方案的具体实施提供了技术指导,很具实用性。
文献主要针对基础数字图像处理技术为新型的石英棒加工产业提供了一种可行的解决思路,对其进行了一个简短的综合和综述。采用计算机检测技术对好坏石英棒进行分类反而能提高效率和产能的方式是更加出色的。计算机辅助检测技术[7]的使用为石英棒质量检测提供了一种快速的手段[8]。
第2章 图像预处理
2.1图像去噪
由于恶劣的工况环境和摄像头本身质量的原因,需要在图像特征提取之前进行图像去噪。本文选择中值滤波,中值滤波运算简单、易于实现、算法效率高,对脉冲噪声处理效果好,能很好的保持图像的细节。中值滤波是指对图像中任意一点A(x,y),以该点为中心的滤波窗口设为Sxy,将Sxy内所有点的像素值排序,去像素值序列的中值作为A点的像素值[9],即:
(2.1)
采集的原图如图2.1所示,经中值滤波所得图像如图2.2所示:
图2.1 采集的原图 图2.2 中值滤波后的图像
2.2阈值分割及图像二值化
由于在检测石英棒缺陷时,采用平面激光束在一侧进行照射,容易造成二值图像中近光源一侧目标物清晰而远光源一侧目标物模糊,尽管前人已经研究出较好的阈值分割法[10]为解决此问题,本文提出一种基于改进型位置自适应的阈值分割算法。
2.2.1最大类间方差阈值选择法
该算法根据灰度直方图和最小二乘法原理相结合推导而出。该算法的基本原理是设定阈值为K,使灰度直方图以K为分水岭,一分为二,求解两部分的方差,方差最大时取得最佳阈值K[11]。
2.2.2基于改进型位置自适应的阈值分割算法
该算法的是建立在现有最大类间方差阈值选择法基础之上的,且做如下改进以更好适应于石英棒缺陷检测。基本原理为,对每一列像素点应用,最大类间方差阈值选择法求取阈值,且阈值的变化具有单调变化性,即距离光源越远阈值越小,反之越大。单列阈值确定方法如下:
设单列像素中像素点的灰度范围为[L1,L2],设计等差数列K={k1,k2,…ki,…,kN},,,求取使类间方差最大的ki,即该单列像素的二值化阈值[12]。
类间方差g的计算公式如下:
|
| (2.2) |
式(2.2)中:
,表示图像大小,本文选取M=1,N为单列像素中像素点数量,N0为单列像素中灰度值小于ki的像素点数量;
,N0为单列像素中灰度值不小于ki的像素点数量;
,为单列像素中灰度值小于ki的像素点的灰度平均值;为单列像素中灰度值不小于ki的像素点的灰度平均值。
在确定每一列的阈值后需要检测阈值是否符合单调变化性(距离光源越远阈值越小,反之越大),若不符合,为不使算法过于复杂,可以使出现异常的列的阈值为相邻列的阈值的算术平均。然后按照每一列确定的阈值进行图像二值化,得到白色像素(二值图像用“1”,灰度图像用“255”来表示)和黑色像素(用“0”表示)的点阵[13]。本文提出的基于改进型位置自适应的阈值分割算法框图如图2.3所示,对图2.4采集的原图利用本文所提算法进行阈值分割,可得图2.5所示图像,可见图像的相比原图,亮度有所增加,并且目标物与背景有很明显的分离,便于后续处理。
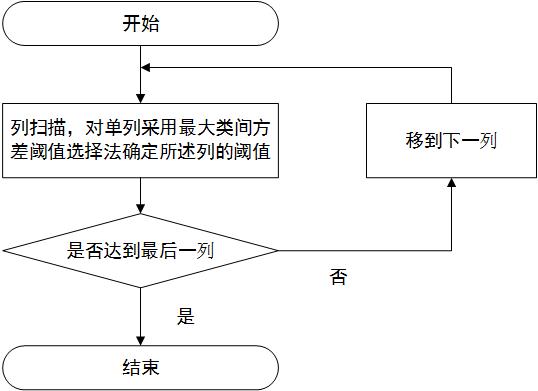
图2.3基于改进型位置自适应的阈值分割算法
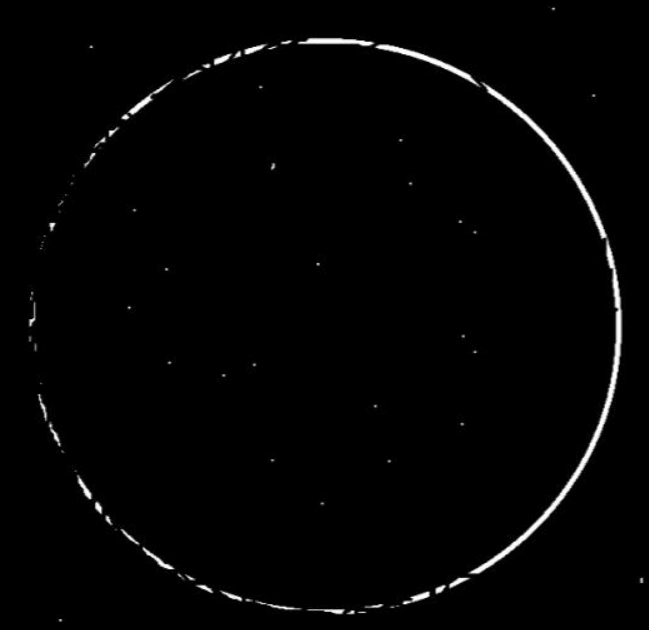
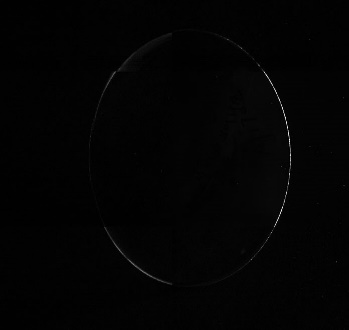
图2.4 采集的原图 图2.5阈值分割及图像二值化
2.3连通域标记
经典的连通域选定算法有递归搜索法、游程扫描标号法[14],但运算速度较慢,无法直接提取几何特征值,不能满足工况实时性要求,并且递归算法占据的存储空间大。本文基于以上算法的缺陷提出了一种基于行程的连通域标记算法。现将算法描叙如下:
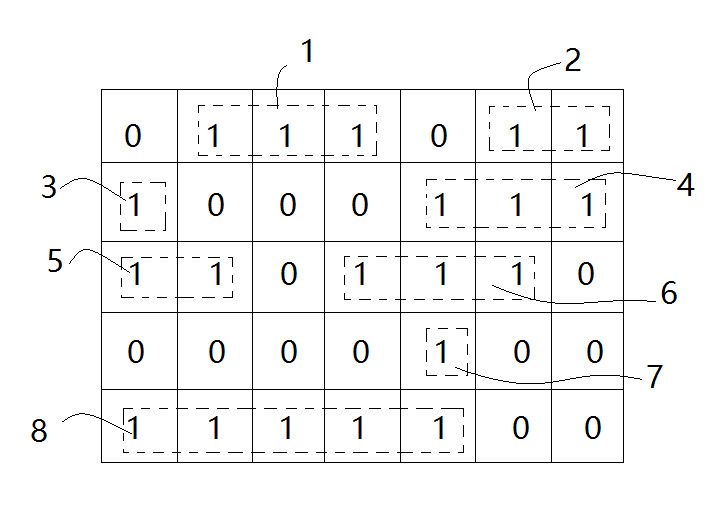
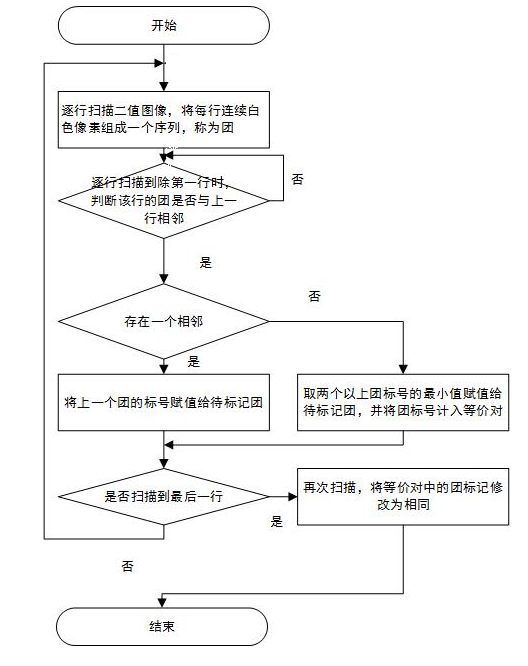
⑴逐行扫描二值图像,将每行连续白色像素组成一个序列,并将此序列称为团,记下团的起点start,终点end,所在行号line;
⑵对于所有团除去第一行的团,如果它与前一行的所有团没有相邻边,则给它一个新的标号;如果仅与上一行一个团有相邻边,则将上一个团的标号赋值给它;如果它与上一行的2个以上的团存在相邻边,则取两团标号的最小值赋值给它,将这几个相邻团的标号、团的起点写入等价对,标示它们属于一类;
⑶一次完整的遍历完成后,开始遍历等价对,将等价对中最小的团的标号(设定为min)确定为该等价对包含的所有团的标号,并根据等价对中每个团的起点在二值图像中查找相应的团,将团的标号修改为min。
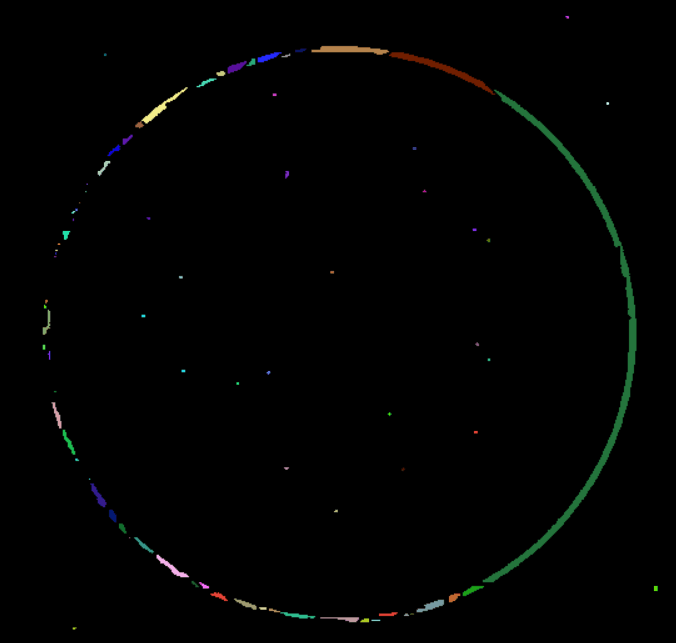
利用本文所提基于行程的连通域标记算法对二值化图像进行连通域标记,可得图2.6所示图像,其中不同的颜色代表不同的连通域,此处只是为便于观察算法的运行效果而对不同连通域标记不同颜色[15]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: