双通道CAN系统增强网络容量的实现外文翻译资料
2022-07-20 19:44:45
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
双通道CAN系统增强网络容量的实现
Jee Hun Park, Man Ho Kim , Suk Lee
釜山大学 釜山 韩国
network@pusan.ac.kr, kmh@pusan.ac.kr, slee@pusan.ac.kr
摘要
控制器局域网(CAN)协议是世界上车载网络中使用最为广泛的,因为它可以在数据传输速度为125Kbps到1Mbps的电子控制单元提供有限制的传输延时,而且很多汽车公司由于其出色的通讯特性已经选择将CAN协议作为他们的车内网络系统,比如智能汽车的底层网络系统,但是在车载电子控制单元的增加和高级驾驶辅助系统更多智能功能的需求下,车载通讯系统需要具有更多网络容量和实时服务质量的网络,作为提升CAN系统网络容量的一种途径,本文介绍了一种双通信通道的CAN系统。文中提出了一种消息分配算法,该算法利用每个信道的预测流量将消息分配到更合适的信道,用商用的现成的微控制器和两个CAN控制器的实验测试台,证明使用消息分配算法的双通信信道CAN系统的可行性。
一、引言
近来人们对智能汽车工业的兴趣日益浓厚,比如高级驾驶辅助系统或车载通讯系统,他们可以为司机和乘客的安全性和便利性提供显著性的提高[1-3]。作为智能交通系统的一部分,智能汽车有很多电子控制单元,它们连接传感器和执行器来操作人车交互界面和面向安全和方便的系统[4-6]。为了获取设计灵活性和资源共享性等许多优势,汽车公司和零部件制造商已经开发出车载网络,该系统通过类似CAN协议的共享网络电缆进行电子控制系统互联。车载网络的一个常见的应用就是底盘集成网络系统,其中很多电子控制单元通过CAN协议交换像车身加速度、车轮加速度和转向角这样的传感器和控制器参数[7],CAN协议是车载网络中具有主宰地位的协议,主要因为它可以在数据传输速度为125Kbps到1Mbps的电子控制单元提供有限制的延时通讯[8-9],特别是很多汽车公司由于CAN优秀的通讯特性,已经选择CAN协议作为他们下一代的底层集成网络系统[10-11]。
但是,随着为了加强人机交互界面和面向安全性和便利性系统的发展,电子控制单元的数目也随之增加,交换传感器和控制器信息的电子控制单元去突破允许限度是必要的,因为它相对较低的数据传输效率,CAN协议提供了许多显著性的限制,比如网络容量的短缺和实施服务质量的不足[12]。特别是如果控制信息交换发生在安全系统延时超过允许限度的时候,安全功能将会恶化并且导致汽车损坏和司机、乘客的死亡。
汽车公司已经试过几种方法去确保车载控制系统的实时质量服务不出故障,比如底层网络集成系统。汽车公司更偏向的商业性的解决方法是以使用通道去完成2个或更多CAN片段的互联方法为导向[13]。但是,如果控制信息数量的交换出现在片段增加后,通道的时间延时会迅速增加[14],这也是网络性能降级的原因,特别是如果一个通道发生故障,全部网络都会出错。
另外一种代表性的方法就是涉及时间触发协议发展的解决方法比如FlexRay。FlexRay协议在1Mbps和10Mbps之前可以保持相对较高的数据传输速率,并且它的内部结构非常契合车载网络所需要的周期性严格实时流量,比如底层集成网络系统[15-16]。但是它需要非常麻烦的更改消息调度和所有节点的应用程序更新,这对零部件制造商是不可能实现的[17]。同时,FlexRay节点的发展和实现开销比CAN节点的发展和实现开销更高。所以,汽车公司对于将CAN网络改成FlexRay网络仍然保持犹豫的态度[18]。
本文主要讲述另一种克服包括网络容量短缺和实时服务质量不足等CAN系统限制问题的方法,本文介绍双通道CAN系统设计和带有双协议控制器和收发器的CAN节点。由于最近的微控制器科技的创新,几个带有2个或更多的CAN控制器的商业化的现成的微控制器现在是可获得的。如果2个或更多的通讯通道被用于在电子控制单元内交换信息,那么网络容量将会增大,并且在CAN数据库没有任何更改的情况下网络的性能将会加强。但是,CAN系统的有效开发和操作需要在CAN节点的两个通道进行精确地流量分配,本文展示了一个通信预测思路,即分配流量去更精确的通道去优化网络性能的每个通道的通信和流量分配算法,这样一个CAN系统。实验证明:使用商业化的现有的带两个CAN控制器的微处理器用于论证带双通道的CAN系统是可行的。
本文的其余部分是按如下方式组织的,第二部分描述双通道CAN系统的结构并且展示流量预测思路和流量分配算法。第三部分描述流量分配算法的具体实现和实验结果,第四部分将展示总结和结论。
二、双通道CAN系统的架构
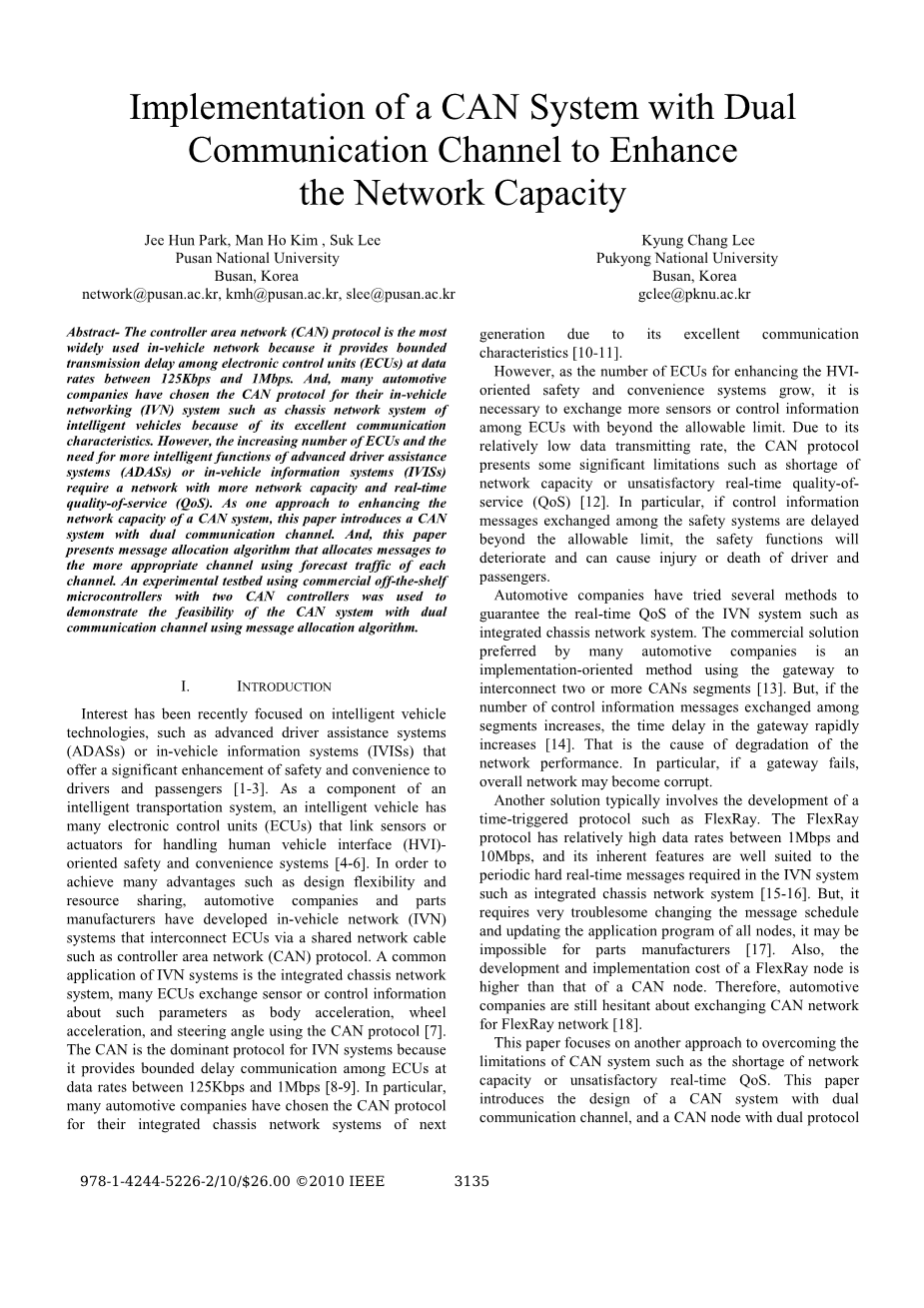
理论上,一个CAN系统中如果使用两个通道,那么把每个通道上的信号减少到一半是可以的。但是,自从信号概率性地产生后,很难去制造一个两通道流量是完全相等的理想情况,因此,开发一个流量分流算法去使两个通道更大是必要的,图1展示设计的CAN系统是为了消除了双通道CAN信号,CAN系统的duo-CAN节点包含了信号预测器、通道分配器、双CAN控制器和收发器。信号预测器使用信号预测算法去预测两个通道的流量,通道分配器使用流量分配算法去判断哪个通道是合适的,控制器和收发器执行传递和接收的任务。
图1 双通道CAN系统的架构
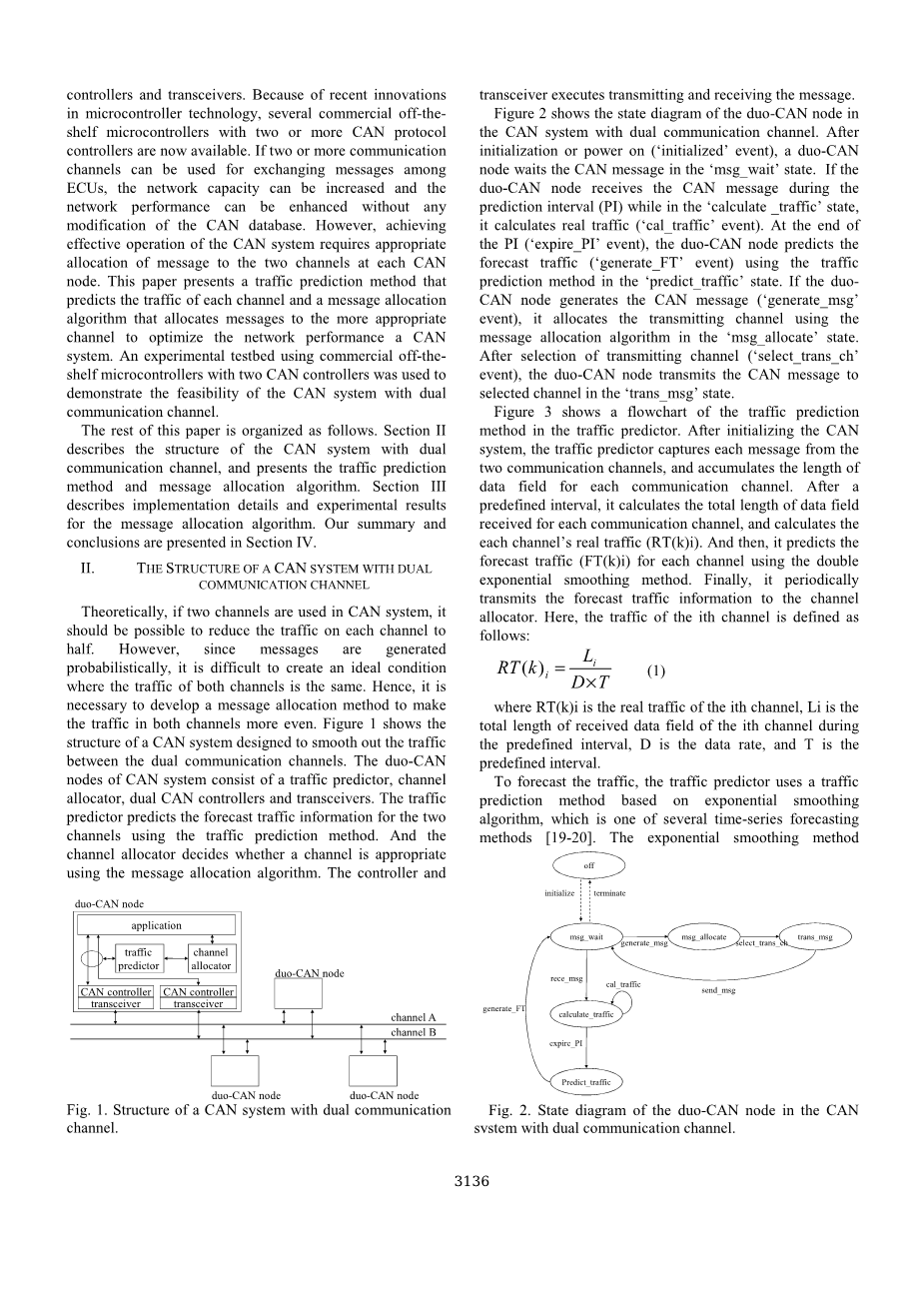
图2展示了CAN系统中的duo-CAN节点的状态关系图,在初始化和通电(lsquo;initializedrsquo;事件)后,一个duo-CAN节点会在lsquo;msg_waitrsquo;状态中等待CAN信息,当duo-CAN节点在lsquo;calculate _trafficrsquo;状态中,如果duo-CAN在预测间隔中没有接收到CAN信
图2 双通道CAN系统中duo-CAN的状态图
息,它将计算真实流量(lsquo;cal_trafficrsquo;事件),在预测间隔(lsquo;expire_PIrsquo;事件)的结束处,duo-CAN节点将会预测预估流量(lsquo;generate_FTrsquo;事件),在lsquo;predict_trafficrsquo;状态中使用流量预估算法,如果duo-CAN生成了CAN信息(lsquo;generate_msgrsquo;事件),它将在lsquo;msg_allocatersquo;状态使用流量分配算法分配传输通道。在传输通道的选择后(lsquo;select_trans_chrsquo;事件),这个duo-CAN节点将在lsquo;trans_msgrsquo;状态中传输CAN信息至指定的通道。
图3在信息预测器中展示了流量预估算法的流程图,在CAN系统的初始化之后,信息预测器将从两个通讯通道中捕获每一个信息并且为每个通道积累数据区的长度,在一个预先确定的间隔之后,它
图3 流量预测期使用的流量预测算法流程图
将为每一个通讯通道计算收到所有数据区的长度,并且计算每个通道的实际流量(RT(k)i),然后它将使用双指数平滑法为每个通道计算预测流量(FT(k)i),最后,它将周期性地传输预测流量信息到通道分配器中,通道的流量定义如下:
RT(k)i= (1)
如果RT(k)i是对应通道的真实流量,Li就是在预先确定的间隔通道中所获得的数据区的最大长度,D是数据速率,T是给定间隔。
为了预测流量,信息预测器使用了基于指数平滑法的流量预测算法,指数平滑法也是几个时间序列预测算法之一[19-20],随着观察值变大,指数平滑法分配按指数进行衰减,双指数平滑法消除随机变动并且展示趋势和周期性部分,双指数平滑法更适合与正弦波相一致的预测流量模式,为了在流量预测器里面预测第k次(kth)的预测流量FTA(k) 或者FTB(k),双指数平滑法可以用如下来表达:
FTi[1](k)= alpha;RTi(k) (1-alpha;)FTi[1](k-1)
FTi[2](k)= alpha;FTi[1](k) (1-alpha;)FTi[2](k-1) (2)
FTi(k)=(2 ) FTi[1](k)- (1 ) FTi[2](k)
当在第k循环中使用平滑消除法,如果FTi[1](k)和FTi[2](k)在确定的第i通道预测流量等级处于第一位和第二位的时候,RTi(k)就是收到的所有消息的长度中第k循环第i通道的实时流量,同时alpha;通常就是反复试验和错误仿真的0.05-0.3的范围中选择的双指数平滑消去参数, FTi(k)是在第k循环流量分配算法第i通道的预测流量,这里,RTi(0)、FTi[1](0)和FTi[2](0)最初是设置为零,FTi[1](0)假定为一个给定间隔CAN系统测得的初始流量的平均值。
即使所有的duo-CAN节点从流量预测器预测到几乎相同的流量信息,所有节点也不应该选择含较低流量的相同的通道,所以不能将他们的选择集中在一个通道内,图4展示了基于预测流量确保duo-CAN节点的双通道信息顺畅的流量分配算法,在初始化CAN系统之后,流量分配算法将从流量预测器中获得预测的流量信息,如果这个duo-CAN节点生成了一个信息,流量分配算法将计算PA(k) 和PB(k),同时FTA(k)和FTB(k)也将各自代表通道A和B中的预测流量。
PA(k)= (3)
PB(k)=
在计算完FTA(k)和FTB(k)之后,流量分配算法将在0-1中生
图4 duo-CAN节点的流量分配算法流程图
成一个均匀随机数去选择通讯通道,如果生成的随机数小于FTA(k),流量分配算法将选择通道A去传输信息,否则,流量分配算法将选择通道B。
三、双通道CAN系统实验性能评估
正如图5(a)所展示的,这部分描述了使用嵌入式微控制器单元的实验台的具体实现和CAN系统的性能,试验台包括了8个duo-CAN节点,1个延时测量节点和一个运行Vectorrsquo;s CANoe软件的笔记本电脑。这个试验台的原理图是为了去仿真车载网络系统,它包含了例如车窗的限制传感器的传感设备、例如接受一个控制信号的驾驶员窗户模块的传输数据到控制设备。
图5(b)展示了试验台的具体实现,带双独立CAN2.0A/B通讯控制器的飞思卡尔MC9S12DG256 16位微控制器被用作试验台的duo-CAN节点[21],流量预测算法和流量分配算法将使MathWorksrsquo; MATLAB Simulink and Stateflow 软件实现,使用Mathworks Real-Time Workshop进行C语言转换,并且使用Metrowerks CodeWarrior下载到MC9S12DP256微控制器内部[22]。此外,一个简单信息传输程序下载到每个duo-CAN节点去制造CAN系统的流量。最后,运行Vectorrsquo;s CANoe软件的笔记本电脑将汇总连接到CAN上面的所有信息。这个CAN系统的数据传输速率设为500 Kbps,为了和CAN系统进行对比,我们搭建了一个基于MC9S12DG256 16位微控制器和Real-Time Workshop的带有通道选择开关的双通道的CAN系统。
(a)实验装置原理图
(b)实验设置的具体实现
图5 双通道CAN系统的实验设置
为了评估这次流量分配算法的性能,我们在每8-20msec内在每个duo-CAN节点循环生成6个信息,如表格1所展示。在这些实验条件下,我们测量了信息的传输延时并且通过CAN信息ID计算了平均传输延时,我们将duo-CAN节点生成信息和信息成功传输到duo-CAN节点的时间差定义为传输延时,我们然后计算了衰减率,衰减率是指信息分配或者有传统CAN进行通道切换的延时,同时,我们简单假定从0x6E到0x118为高优先级,从0x1FE到0x2A8为中等优先级,从0x712到0x7BC为低优先级,并通过信息ID来清晰地展示影响。
表格1 使用信息生成条件的duo-CAN节点来评估信息分配算法
图6展示了平均传输延时和常规CAN内部高优先级信息(0xDC)的衰减率,通道选择CAN和信息分配CAN。在图6(a)中,当高优先级信息的网络流量在常
全文共11554字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[8864],资料为PDF文档或Word文档,PDF文档可免费转换为Word



