控制中的参考基于控制不变集的塔式起重机外文翻译资料
2022-07-20 20:24:25

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
2015电力驱动与电力电子技术国际会议(EDPE) 高塔特拉,2015年9月21日至23日
控制中的参考基于控制不变集的塔式起重机
电气工程与计算学院,萨格勒布大学,
Unska 3,HR-10000萨格勒布,克罗地亚,
电子邮件:{sandor.iles,jadranko.matusko,fetah.kolonic}@fer.hr
摘要 - 起重机系统的约束控制通常基于控制算法,利用控制不变集来保证稳定性和约束满足。 本文提出了一个参考调速器作为扩大这种算法的吸引区域的一种方式,假设起重机被建模为一系列分开控制的动态耦合子系统。 提议的参考调节器基于这样的事实,即每个子系统的动态是不变的,可能会改变位置。 因此,想法是通过计算分段常数参考信号的序列来扩大吸引区域。 所提出的方法通过使用基于控制不变集的控制器的实验室模型的仿真和实验测试来验证。
关键词 - 运动控制,3D塔式起重机,预测控制,参考调速器。
1.简介
起重机是主要用于转移重物的系统。它们通常由起重和支撑机构组成。提升机构用于提升和降低悬挂的有效载荷,而支撑机构用于在起重机工作区周围移动悬挂点。在支撑机构的运动期间,有效载荷的摆动运动由起重机惯性力触发。
起重机控制器的主要任务是以快速和安全的方式点对点搬运有效载荷,同时抑制摆动的有效载荷运动并尊重各种操作和技术限制。起重机控制问题的解决方案可分为开环和闭环解决方案。开环解决方案,如输入整形[1]仍广泛使用。尽管这种解决方案在抑制由起重机惯性力引起的振荡方面非常有效,但具有外部源的那些解决方案仍然没有阻尼。另一方面,闭环解决方案有多种形式,从简单的PID控制到先进的非线性控制方法,通常采用增益调度和人工智能技术。有关参考,请参阅有关起重机控制方法的评论文件[2]。然而,在闭环方法中,经常使用起重系统的分散控制或分散控制,其中起重系统的每个控制器负责控制具有信息交换可能性的单个子系统[3] - [5]。在对起重机系统进行约束控制的情况下,通常使用基于先进优化的技术作为模型预测控制(MPC)或线性矩阵不等式(LMI)的控制[5] - [13]。
上述两种方法都依赖于控制不变集合的概念来始终保证约束满足。在基于LMI的控制器中,系统状态通常保存在控制Lyapunov函数的一组子集中,这明显限制了起重机系统允许的操作范围[14,15]。相似性在MPC的情况下,通常使用终端成本和终端集约束来保证稳定性和递归可行性[16]。这种约束定义了一个控制不变集,这可能会严重限制起重机系统[5],[17],[18]的操作允许范围及其控制性能。参考调速器已被广泛用于控制系统中,以便修改主控制器的行为,从而确保约束满足[19,20] [21]。通常通过改变其主动参考信号来修改主控制器的动作。参考州长的想法在本文中以不同的方式被利用。也就是说,我们假设初级控制器(例如模型预测控制器,基于LMI的控制器)已经满足输入/状态约束,可能存在保守关联控制不变集,即约束满足和系统稳定性的初始状态集得到保证。为了扩大主起重机控制器的控制不变集,利用参考调速器改变主动参考信号,利用起重机子系统的平移不变特性。所提出的解决方案在塔式起重机的实验室模型中得到证明,但结果也立即适用于门式起重机。本文的其余部分安排如下。在第二部分给出了一个塔式起重机的控制导向模型。所提出的参考调速器在第III节中给出,而在第IV节模拟中给出了实验结果。最后第五节总结了这篇论文。
2塔式起重机的数学模型
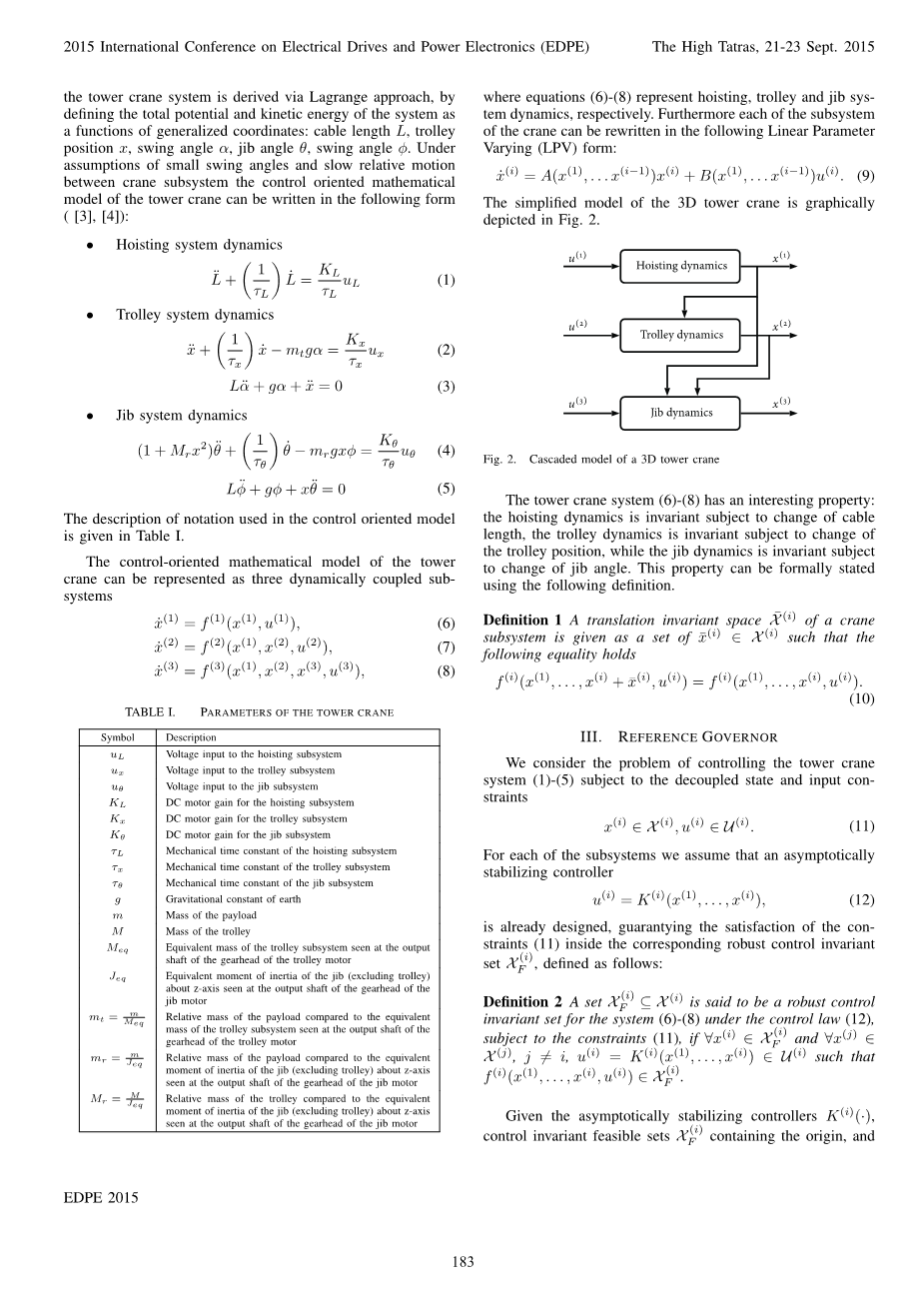
塔式起重机系统包括负责提升和降低有效载荷的提升子系统,负责负载平移的小车子系统和负责有效载荷旋转的副臂子系统。 非线性数学模型塔式起重机系统通过拉格朗日方法导出,通过将系统的总电势和动能定义为广义坐标的函数:电缆长度L,小车位置x,摆动角度alpha;,臂架角度theta;,摆动角度phi;。 在小起伏角和起重机子系统之间相对运动缓慢的假设下,塔式起重机的面向控制的数学模型可以写成下面的形式,给出了面向控制模型中使用的符号的描述。塔式起重机的面向控制的数学模型可以表示为三个动态耦合的子系统。各个字母代表的含义。
uL输入到起升子系统的电压
ux电车输入到电车子系统
utheta;电压输入到臂架子系统
KL起升子系统的直流电机增益
Kx电车子系统的直流电机增益
Ktheta;直升机子系统的直流电机增益
tau;L提升子系统的机械时间常数
tau;x小车子系统的机械时间常数
tau;theta;机械臂时间常数
g地球的引力常数
m有效载荷的质量
M小车的质量
Meq在输出端看到的小车子系统的等效质量
Jeq小车电机减速机的轴副臂的等效惯性矩(不包括手推车)
mt = m/Meq关于在减速机输出轴上看到的z轴吊臂电机有效载荷的相对质量与等效载荷的相对质量
mr = m/Jeq有效载荷的相对质量与等效载荷的相对质量
Mr = M/Jeq在输出轴处看到的小车子系统的质量
有效载荷的相对质量与等效载荷的相对质量
副臂(不包括小车)围绕z轴的惯性矩
在起重臂电机的齿轮箱的输出轴处看到
手推车的相对质量与相应的相比
副臂(不包括小车)围绕z轴的惯性矩
在起重臂电机的齿轮箱的输出轴处看到
塔式起重机系统(6) - (8)具有一个有趣的特性:随着缆索长度的变化,起重动力学不变,随着小车位置的变化,小车动力学不变,而小臂动力学不变, 的角度角。 使用以下定义可以正式说明该属性。
图1.塔式起重机的型号
翻译不变空间(i)我们想要的问题X要解决的是如何延伸该地区的吸引力上述控制器受到约束(11)。根据定义1,电缆长度,小车位置,起重机工作空间内的零摇摆和速度下的起重臂角度代表相应的平移不变空间子系统。 因此,追踪分段的问题(i)macr;(i)每个起重机子系统都可以常量引用xref X通过适当的变化转化为监管问题坐标。我们建议使用一个参考调节器(图3)离散时间实例k用于找到一个收敛序列可行的平衡点如下:问题1给定状态xk(i),在时刻k,一个控制不变可行集(i),平移不变空间
图3.参考调节器作为一种扩大可行性区域的方法
图3.参考调节器作为一种扩大可行性区域的方法基于控制不变集的分散/分布式控制算法
根据(16)在每个时刻,渐近地稳定系统(6) - (8),xk(i)F(i)其中F(I)=(ⅰ)(i)中。 (17)XF X0受制约(11)。证明:问题1的最优解是x〜(i)= 0,X(ⅰ)(i)中。此外,以下不等式成立XF(i)lt;x(i),(18)根据(14)和(17),x(i)= 0,x(i)F(i)。最佳问题1的解决方案表示根据一个固定点定义1.由于系统动力学对于coor-X(I)dinate通过假设改变x(i)0(i),控制器(12)
渐近稳定系统服从x。特定系统的状态xk(i)F(i),xk(i)= 0且最优问题1的解x#39;(i)在时刻k是渐近的(i)(i)ge;1,和稳定性意味着k1 0:xk k lt;xk因此x?k k1 lt;x?k,这意味着最优问题1的解决方案以及系统的状态将(i)在有限的时间内。最佳解决方案输入设置XF比变成零,最后,统是渐近的稳定受到零平衡点的影响。 此外,由于控制器(12)满足输入约束条件通过假设并根据(13和(17)设定(i)该组F(i)XF(i),约束一直得到满足。X提出的方法背后的想法是图形化的
如图4所示
图4基于参考调速器的塔式起重机控制思想
为了展示所提出的方法的益处,已经通过模拟和实验方式对三维塔式起重机实验室模型进行了测试。
作为第一步,设计了两种不同的控制器,即基于LMI的分散控制器和模型预测控制器,受到输入限制是依赖于参数的李雅普诺夫函数,而gamma;(i)是定义相应的子水平集的正标量。 控制器通过求解相应的LMI条件来离线计算(详见[15]及其中的参考)。
控制器设计用于保证参考信号x(1)LMI,refle;0.15 m和x(2)LMI,refle;0.4 rad从静止位置开始的约束满足。
按照[5]中介绍的步骤,设计了三维塔式起重机的分布式MPC算法,该算法基于连续求解三个有限时间最优控制问题。
第一个有限时间最优控制问题被设计用于负责提升和降低负载的提升子系统,第二个用于小车,第三个用于起重臂子系统,负责点到点移动负载。
建议的解决 方案可以描述如下:
1)解决电缆长度的优化问题。 基于电缆长度L的预测获得矩阵A(2)k,BK(2)
2)解决平移运动的优化问题。 基于电缆长度L和平移运动x的预测,获得矩阵A(3)k,Bk(3)
3)解决旋转运动的优化问题
其中XT(i)代表终端集合,KF代表双模控制规则。终端集合和终端成本使用[5]中给出的LMI条件和其中的参考文献计算,而控制不变集合XF(i)使用类似于[22]中给出的LMI条件计算。
从静止位置开始,最大允许参考信号由计算出的XF(i)定义。所获得的
控制器保证约束满足的参考 - (1)MPC,refle;0.133 m和x(2)MPC,refle;1.08 rad从静止位置开始。在两种情况下,通过从与主控制器相关的控制不变集合之外的初始状态开始测试系统,即x(1)ref = 0.36。小车子系统的仿真和实验结果如图5所示。作为参考调速器行为的结果,可以看出,在两种情况下,参考信号(黑线)被改变,从控制不变量的边界开始设置
图5.具有基于LMI的控制器和用于小车系统的分布式MPC的参考调速器,虚线 - 仿真结果,固体实验结果,黑色活动参考信号,蓝色 - 小车子系统的位置,红色 - 相应的摆动角度,洋红色 - 控制输入主控制器的容许参考),并在系统演变时收敛到原始参考信号.虽然上述方法可以实现对塔式起重机系统的适当控制性能,但仍有一些重要问题尚待解决。对于现有的塔式起重机轨迹规划方法,当工作环境温和时,它们可能工作得很好。当工作环境复杂且不可避免的外部干扰时,为了获得满意的控制性能,亟需一些反馈跟踪控制方法。
考虑到这些因素,并着眼于塔式起重机系统的跟踪控制问题,本文提出了一种新颖的4自由度塔式起重机系统的跟踪控制法则,该系统在一系列轨迹上获得了适当的跟踪性能,有效载荷摆动抑制。具体来说,仔细分析机械能后,该系统被证明是被动的,然后考虑跟踪目标,定义一个整形的能量函数作为Lyapunov函数候选。之后,设计了一种新型跟踪控制器。利用Lyapunov稳定性理论和LaSalles不变性原理,证明闭环系统是渐近稳定的。最后,通过一系列的仿真实验验证了该方法的优越控制性能。
本文的其余部分组织如下:第二部分给出系统动力学以及塔式起重机系统的跟踪控制目标。详细的控制器设计过程和闭环稳定性分析如第三节所示。在第四节中,为了验证这种方法的有效性,一些模拟测试被实现。第五部分总结了整篇论文并给出了主要结论对于基于LMI的控制器和MPC
图7.完整的起重机操作:带有参考调速器的基于MPC的控制器
3结论
本文提出参考调速器作为扩大三维塔式起重机系统渐近稳定控制器吸引区域的一种方法,该系统利用控制不变集合来满足状态和控制输入的约束条件。 所提出的方法的好处在于使用
两个不同的控制器:(i)连续时间的基于LMI的控制器和(ii)分布式MPC控制器,显示了所提出方法的一般性。 该方法的主要优点是能够扩展控制器在整个起重机工作空间内的吸引区域,仍然为约束满足提供保证。为四自由度塔式起重机系统设计了一种有效的跟踪控制方法。 具体而言,首先提出了该塔机系统的详细动力学模型。 然后利用无源性理论构造了Lyapunov函数候选的形状能量型正定函数,在此基础上设计了一种有效的跟踪控制方法。 与大多数现有方法不同,所提出的方法基于原始非线性系统模型,而不需要线性化。 通过MATLAB / Simulink实现了一系列的仿真测试来验证所提出的方法的性能。 在未来,我们将重点设计有效的轨迹规划方法,并考虑塔式起重机系统的摆动抑制
致谢
这项工作得到了欧洲地区发展基金在“发电厂和轨道车辆先进技术”项目下的部分支持
参考
[1] W上。 Singhose,“命令塑造灵活的系统:回顾前50年,”国际精密工程和制造杂志,第一卷。 10,没有。 4,pp.153-168,2009。
[2] E。 M. Abdel-Rahman,A. H. Nayfeh和Z. N. Masoud,“起重机的动力学和控制:综述”,Journal of Vibration and Control,vol。 9,没有。 7,pp。863-908,2003。
[3]小时。 M. Omar,控制龙门和塔式起重机。博士论文,Citeseer,2003。
[4] F。 Altaf,“建模和事件触发控制多台3D塔式起重机,wsns,”2010。
[5]第Ilescaron;,J.Matuscaron;ko和F. Kolonic在“Industrial Electronics(ISIE)”2014年IEEE第23届国际研讨会论文集,
全文共6299字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[8800],资料为PDF文档或Word文档,PDF文档可免费转换为Word



