无动力控制策略仿真模型的发展和评估外文翻译资料
2022-07-31 14:48:45

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
无动力控制策略仿真模型的发展和评估
摘要——本文对于工业机器人手臂的无动力控制的建设和评估提出了两种不同的策略。第一,描述了机器人手臂动力学模型的两连杆模型和无动力控制方法的基本结构。然后对两个不同的无动功控制体系结构进行说明。两种不同的无力控制策略分别通过动态外部扭矩和无力控制通过动态力矩独立补偿进行无级控制。通过进行Matlab / Simulink环境下的仿真,分析了工业机器人手臂配置的单链路和双链路视图,并且分析了各种无动力控制策略。无动力控制的模型特征被用来讨论应用场景。此外,通过在整个模拟中使用真实的机器人参数来进行无动力控制的分析。由于无动力控制处理施加在机器人手臂上的外力,所以可以把它通过外力的被动运动来说明人与机器人手臂之间的交互力控制。
索引——无动力控制(FFC),外部扭矩无动力控制(FFC-ET),无扭矩的无动力控制(FFC-TIC)
- 介绍
本文以Matlab / Simulink为模拟工具,重点研究了无动力控制(FFC)系统的仿真与分析[1]。 FFC的重要性在于它可以用于通过施加外力来产生机器人手臂的灵活运动。 它根据施加的力量创建被动运动。
在[2]中,其中的参考文献通过使用仅在实验机器人下测试的补偿系数方法给出了FFC的细节,并且没有进行模拟研究来详细地开发和评估系统行为。
通常,机器人手臂用于许多行业的各个领域并用于许多目的,并且机器人的刚性必须被需要并且适应于具体的要求。例如,在切割和焊接的情况下,机器人臂的刚度必须更高,因为机器人手臂的尖端的轨迹需要高精度[3] [4]。然而,在某些情况下,例如磨削或组装操作,机器人手臂的刚性必须保持较低,因为需要外力的柔性运动[5]。一般来说,工业铰接机器人手臂设计具有高刚性,适用于精确定位和轨迹跟踪的应用,这些机器人手臂不适应灵活的运动要求,如研磨和组装,拉拔工作作为其原始配置。为了实现机器人手臂在行业中的灵活运动,在机器人手臂的尖端安装了柔性装置,或者也在[6] [7]中也描述了关节致动器的扭矩限制。这些扭矩限制或伺服浮动方法在工业铰接机器人手臂中不太方便,因为需要更改伺服控制器的出厂配置。 提出了其他建立的力控制方法,如阻抗控制和顺从控制,以减少机器人手臂的刚度,类似于[5] [8]。 但是,这些方法相对复杂,还需要对现有的工业机器人控制器进行更改。
通过考虑上述保留原始伺服控制器的困难和需要,FFC是通过在[2]中的几个实验案例引入的。FFC的两种不同的实施策略如图所示,分别通过外部转矩无动力控制(FFC-ET)进行无动力控制和无扭矩无动力控制(FFC-TIC)。零重力和零摩擦条件对于在工业机器人臂上实现FFC是理想的。 在这些条件下,机器人臂由操作者或接触物体给出的外力适当地致动。 因此,实现这种条件是实施FFC的关键。因此,通过根据由外力驱动的理想运动计算客观关节位置来实现FFC。 在FFC的这两种形式中,机器人臂被致动,就像它将在零重力和零摩擦条件下通过外力移动。本文通过使用Matlab和Simulink上的模拟,描述了FFC的理论解释和FFC策略的两种形式的分析。根据FFC的理论发展验证了基于模拟的每个策略的有效性。
FFC的两种不同的实施策略如图所示,分别通过外部转矩无动力控制(FFC-ET)进行无动力控制和无扭矩无动力控制(FFC-TIC)。零重力和零摩擦条件对于在工业机器人臂上实现FFC是理想的。 在这些条件下,机器人臂由操作者或接触物体给出的外力适当地致动。 因此,实现这种条件是实施FFC的关键。因此,通过根据由外力驱动的理想运动计算客观关节位置来实现FFC。 在FFC的这两种形式中,机器人臂被致动,就像它将在零重力和零摩擦条件下通过外力移动。本文通过使用Matlab和Simulink上的模拟,描述了FFC的理论解释和FFC策略的两种形式的分析。
本文的其余内容组织如下。 在下一节中,介绍了工业关节型机器人臂的动力学和运动学的一般特征。 给出了一个双连杆旋转关节型机器人手臂的动力学方程。 然后,说明了FFC的一般概念,并给出了以下部分,通过包括其各自的属性来解释FFC-ET和FFCTIC的理论模型。 之后,该部分专门用于解释Matlab / Simulink综合环境下两个FFC模型的模拟和分析。接下来将讨论FFC的一些可能的应用,最后得出结论。
- FFC动力学
在本节中,介绍了机器人运动学,动力学以及所需的数学表示模型的简要概述。给出了两个连杆铰接型机器人臂的方程式。FFC-ET和FFC-TIC概念在后续章节中进行了说明,其中介绍了每种类型FFC的数学模型,包括区别和突出显示的属性。
A.无动力控制的概念(FFC)
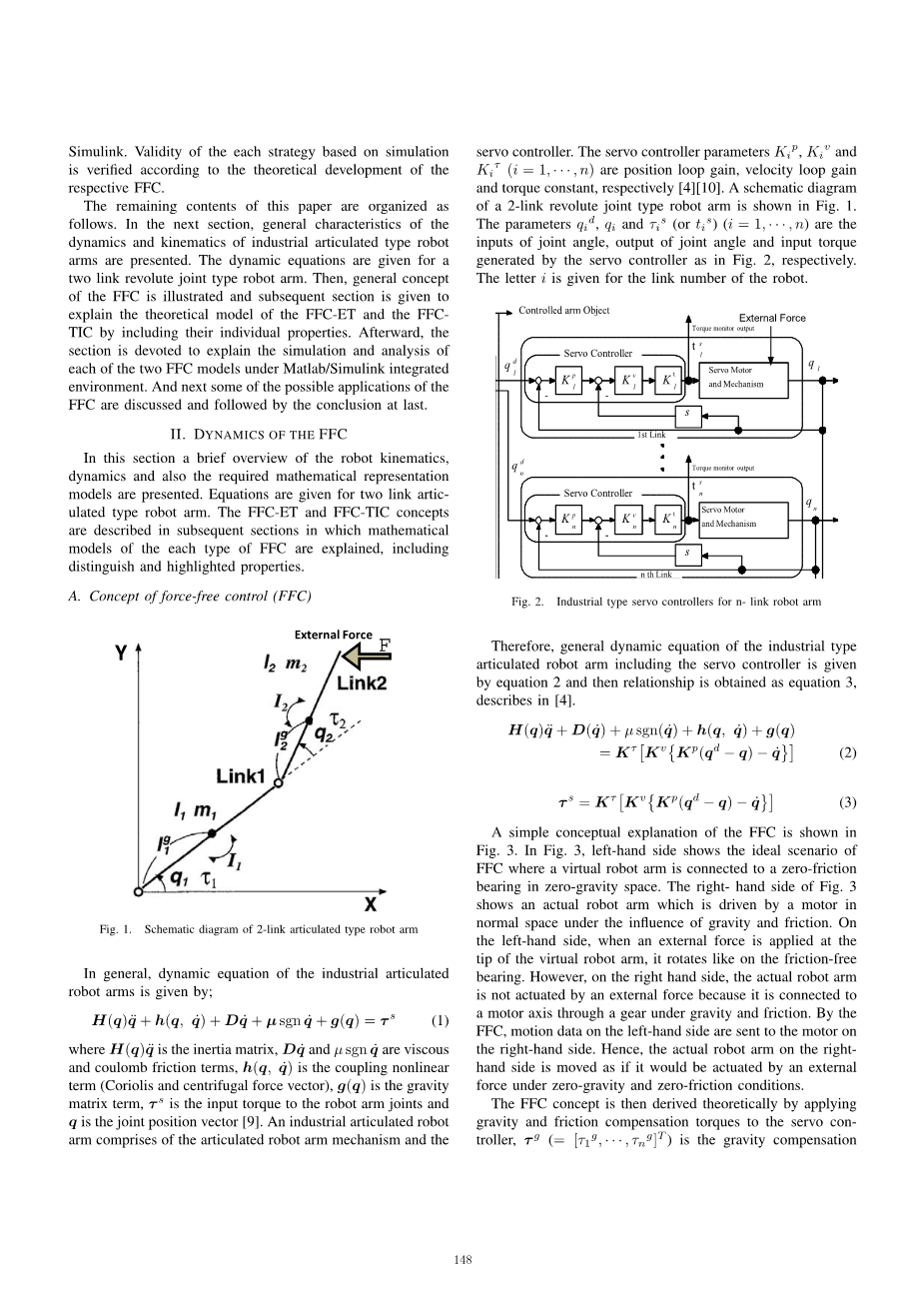
图1.两连杆铰接式机器人臂示意图
一般来说,工业关节机器人手臂的动力学方程由下式给出:
(1)
H(q)q是惯性矩阵,usgnq是粘性摩擦力,h(q,q)是耦合非线性项(离心力向量)g(q)是重力矩阵项,tau;s是机器人手臂关节的输入扭矩,q是关节位置向量[9]。工业铰接机器人手臂包括铰接式机器人手臂机构和伺服控制器。
因此,包括伺服控制器在内的工业型铰接机器人手臂的一般动力学方程式由方程式2给出,然后通过公式3获得关系式,如[4]所述。
(2)
(3)
左侧显示FFC的理想场景,其中虚拟机器人臂连接到零重力空间的零摩擦轴承。在图的右手边,图3示出了在重力和摩擦力的影响下由正常空间中的电动机驱动的实际机器人臂。在左手侧,当在虚拟机器人臂的尖端施加外力时,其像无摩擦轴承一样旋转。然而,在右手侧,由于在重力和摩擦下通过齿轮将其连接到马达轴上,所以实际的机器人手臂不被外力驱动。通过FFC,左侧的运动数据被发送到右侧的电机。
FFC的简单概念性说明如图3所示。在图3中,左侧显示FFC的理想场景,其中虚拟机器人臂连接到零重力空间的零摩擦轴承。在图的右手边,图3示出了在重力和摩擦力的影响下由正常空间中的电动机驱动的实际机器人臂。在左手侧,当在虚拟机器人臂的尖端施加外力时,其像无摩擦轴承一样旋转。然而,在右手侧,由于在重力和摩擦下通过齿轮将其连接到马达轴上,所以实际的机器人手臂不被外力驱动。通过FFC,左侧的运动数据被发送到右侧的电机。因此,右侧的实际机器人手臂就像在零重力和零摩擦条件下被外力驱动一样。
对超低功耗图像处理平台的需求不断增长。 诸如仿生眼[1],智能相机像素[2]等应用在严格的功率预算中需要中等到高的图像吞吐量。 基于神经网络的图像处理显示出比传统的数字平台更加娴熟[3]。 特别地,细胞神经网络(CNN)[4]由于其VLSI有利的架构而引起关注。 CNN由几个与本地扩展互连(突触)耦合的相同细胞(神经元)组成。 已经证明了基于MOSFET的CNN [1],[5]。 然而,MOSFET-CNN的过大功率限制了在较低功率下同时处理较大分辨率图像的能力。
CNN实现以外的几项作品已经探索超越CMOS设备。 研究了基于谐振隧道二极管(RTD)的CNN神经元进行图像处理[6]。 利用自组装量子点和RTD,提出了一种纳米尺度的CNN结构,用于图像处理。 隧道FET(TFET)的非对称I-V特性被用于降低CNN细胞神经元的功率[7]。 虽然上述和其他几个工作已经探索了较低的能量,但CNN突然通过后CMOS器件的功率降低受到了有限的关注。
然后通过对伺服控制器施加重力和摩擦补偿扭矩,从理论上推导出FFC概念,是重力补偿扭矩和是摩擦补偿转矩。
摩擦补偿扭矩()通过采用粘滞阻尼和库仑静摩擦系数计算,
(4)
其中D是粘性阻尼矩阵的系数,mu;是库仑摩擦系数。重力补偿扭矩()通过从机器人手臂的即时姿势和关节位置计算得到,
(5)
因此,FFC概念是通过将机器人伺服控制器的关节位置()作为参考位置输入来实现工业铰接机器人臂的灵活运动。 因此,通过伺服控制器的反作用来计算相应的关节位置。
关节角度的输入是通过求解方程式3的右边来获得FFC来实现:
(6)
和是关节角度。而且,是一个对角矩阵的和,是和的一个对角矩阵。
B.FFC-ET的类型结构和属性
FFC-ET型控制策略的基本方程式为方程1,2,3和6.因此,FFC-ET控制方案可以简化为理想的特征形式:
(7)
理想情况来说,由于施加的外力,惯性力矩补偿通过外部扭矩进行。 以下步骤说明了FFC-ET策略的实施流程。
- 接触力由力传感器检测。
- 通过使用雅可比矩阵如等式13,将检测力转换为关节扭矩()。
- 摩擦补偿扭矩()和重力补偿扭矩()由伺服电机的位置输出和速度输出由等式4和5计算。
- 位置输入()由等式6求解。
- 最后,将位置输入()作为伺服控制器的参考输入。
C.FFC-TIC型结构和性能
FFC的类别通过使用上述部分中描述的一般动力学方程式而得到,其外加力由下式给出:
(8)
伺服控制器扭矩建模为:
(9)
给出了包括伺服控制器的工业关节式机器人臂的总动态方程,用等式8和9代入,
(10)
FFC-TIC意味着惯性,摩擦和重力对机器人手臂运动的影响可以被分配为任意系数的线性组合; 参见[2]和参考文献。然后,FFC-TIC的动力学被描述为:
(11)
其中,和是独立补偿的系数。 从等式9和10可以看出,存在以下关系:
(12)
图4中给出了高级Matlab / Simulink,其中FFC-ET和FFC-TIC模块呈现单臂工业伺服控制器型号。
- FFC策略模拟
- FFC-ET和FFC-TIC的仿真设置
通过使用实际的铰接式机器人参数(Performer-MK3s,YAHATA ELECTRIC MACHINERY MFG,CO。,LTD。)进行仿真。 具有伺服控制器的工业铰接机器人臂机构的详细结构在图1中给出。 2.对于主动单臂和2自由度2链路情况进行模拟研究。 首先,通过采用真实的机器人配置和参数,对单臂情况进行建模和仿真,验证了Matlab / Simulink综合环境下FFC的概念。 然后,对于2连杆平面机器人手臂进行模拟,以观察和分析给定外力的两种形式的FFC,其中对于“X”和“Y”方向获得FFC柔性运动。
具有两个自由度的2连杆的关节式机器人臂的示意图示于图3。 所需的矩阵向量参数如下。
B.FFC-ET和FFC-TIC的仿真结果
两种不同FFC算法的仿真分析是本文的主要方面。 因此,通过使用包括实际工业类型参数的单臂机器人来验证每个FFC算法的验证。 对于单链路仿真,采用Performer MK3的链路2参数。 应用不同种类的外力情景来分析预期的被动运动相对于每个FFC战略的外力的输出。
对于具有相同机器人臂参数和伺服配置的每个FFC模型,通过Matlab / Simulink中的仿真分析FFC的行为。 此外,还对2链路情况进行了研究,以说明FFC-ET和FFC-TIC策略的非线性行为,结果如图1和图2所示。
首先,应用步进参考,然后在2 [s]时施加如图1和2所示的外力。 对于具有相同机器人臂参数和伺服配置的每个FFC模型,通过Matlab / Simulink中的仿真分析FFC的行为。 此外,还对2链路情况进行了研究,以说明FFC-ET和FFC-TIC策略的非线性行为,结果如图1和图2所示。 外力信号通过Matlab / Simulink信号发生器块产生,增加1%随机噪声。
在[9]中类似于制造结构的TFET在这个字母1(a),表1具有缩放的通道长度。 TFET中的电流传导通过从源极到沟道的载流子的BTBT发生,栅极电压控制BTBT势垒宽度,并连续地导通导通电流。 源/沟道结处未掺杂的SiGe层降低了隧道势垒高度,提高了BTBT电流[10]。使用Sentaurus设备[11]模拟TFET的电气特性,其TCAD模型如图1所示。将TFET的性能与等效沟道长度的现有技术的MOSFET结构FinFET进行比较。FinFET原理图和规格如图1所示。 1(b)和表一。
这表明,由于其更陡峭的SS和非常低的Ioff,Si / Ge-TFET对于通过CNN进行超低功耗图像处理是有吸引力的。 尽管Si / Ge-TFET的低导通电流限制了其在数字设计中的应用; 具有细胞平行性,CNN仍然可以从Si / Ge-TFET中提取更高的性能。 虽然TFET目前的研究重点是改善其数字应用的电流; 这项研究强调了TFET设计对于神经元计算具有更高的SS和更低的截止电流的重要性。尽管来自[5]的复用过程使得能够处理比CNN阵列大小更大的分辨率图像,但是由于连续步骤之间的重叠,复用引入低效率,因此处理比图像更有效的像素。考虑到“固定电源”方法,其中CNN阵列的大小取决于阵列功率规格中最小功率单元的
全文共6375字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[142838],资料为PDF文档或Word文档,PDF文档可免费转换为Word



