板的弯曲振动外文翻译资料
2022-08-08 19:28:41
英语原文共 56 页,剩余内容已隐藏,支付完成后下载完整资料
板的弯曲振动
平板结构,如飞机、建筑物和船舶的地板,桥梁面板和机器周围的外壳,能承受垂直于其平面的动态载荷。这会导致弯曲振动。这种结构可以通过将板划分为一组称为板弯曲单元的二维有限元模型来分析。这些单元可以是三角形、矩形或四边形。
根据第2.6节,薄板弯曲单元的能量表达式为:
和
式中[D]由(2.45),(2.49)或(2.51)定义,取决于材料是各向异性的、正交各向异性的还是各向同性的。另外
这些表达式中出现的最高导数是二阶。因此,为了收敛,有必要确保及其一阶导数和在单元之间是连续的。因此,这三个量被视为每个节点的自由度。此外,至少应使用二次多项式(见第3.2节)。无论单元形状如何,位移函数的假定形式是:
(6.5)
6.1矩形薄板单元(不标准)
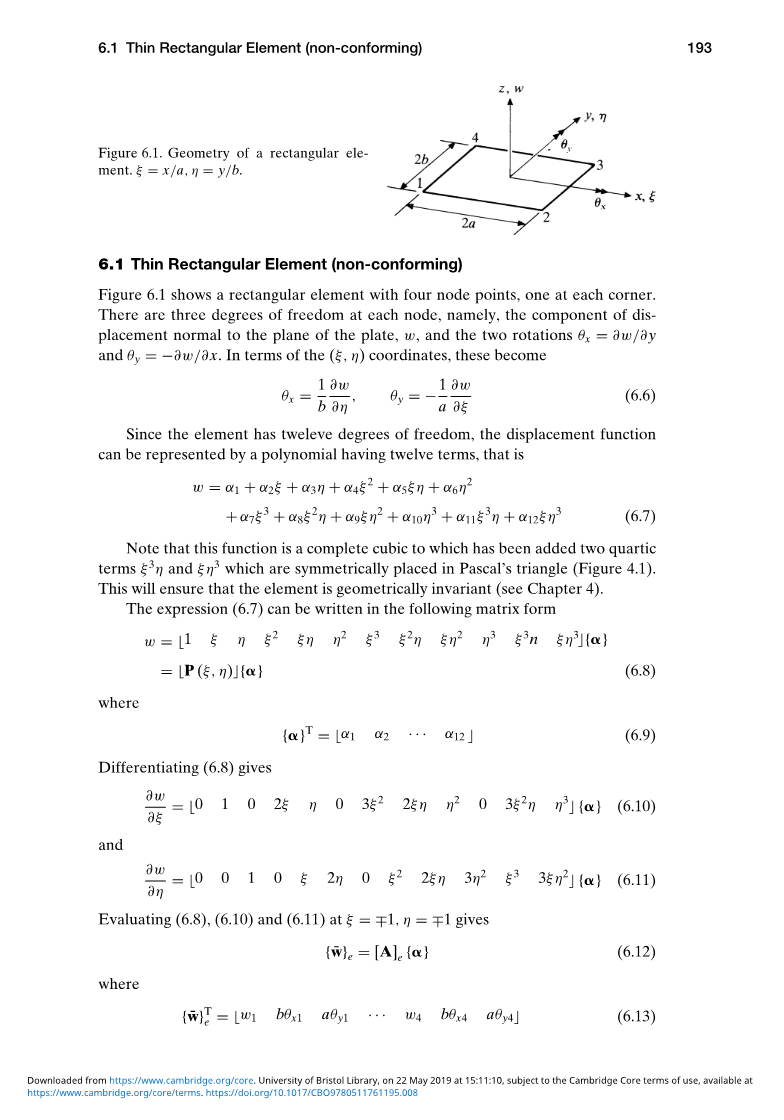
图6.1 矩形单元的几何图形 =x/a,eta;=y/b。
图6.1显示了一个矩形单元,有四个节点,每个角有一个节点。每个节点有三个自由度,即垂直于板平面的位移分量以及两个旋转分量theta;x=和theta;y=-。根据坐标(,eta;),有
由于这个单元有两个自由度,所以位移函数可以用十二项多项式表示,即
注意,这个函数是一个完整的三次函数,加上两个对称放置在帕斯卡斯三角形中的四次项和(图4.1)。这将确保单元具有几何不变性(见第4章)。
表达式(6.7)可以用以下矩阵形式编写
当
时,对(6.8)微分得
和
在=∓1,=∓1时计算(6.8),(6.10)和(6.11)得出
(6.12)
当
时,为求解(6.12)对{}给出
(6.15)
其中
将(6.15)代入(6.8)得
其中
其中(,)是节点j的坐标。该单元通常称为ACM单元[6.1,6.2]。
在2–3侧(i.e., xi; = 1)计算(6.19)得出
这表明位移以及旋转量theta;x,是由和theta;x在节点2和节点3处的值唯一确定的。因此,如果该单元附着在节点2和节点3处的另一个矩形单元上,则和theta;x将沿公共边连续。旋转量theta;y由下式给出
(见方程式(6.6)和(6.17))。将(6.19)代入(6.21)并沿= 1计算得出
当j=1到4时计算(6.22)得
因为theta;y在单元之间是连续的,所以它应该由节点2和3的值唯一地确定。表达式(6.21)和(6.23)表明,在这种情况下,theta;y是由和theta;x在节点1、2、3和4处的值以及theta;y在节点2和3处的值确定的。因此,单元是不标准的单元。尽管如此,仍然使用了该单元,所以,将进一步考虑并指出这种缺乏连续性的影响。
将(6.17)代入(6.1)得
其中
是单元惯量矩阵。在(6.19)中代入函数(,),积分得到
其中
在推导这个结果时,比较简单的做法是在用表达式(6.8)代替和{}之后执行集成。一个典型的积分就是这种形式
将(6.17)代入(6.3)和(6.2)得
其中
是单元刚度矩阵,并且
在(6.19)中代入函数(,)并积分,得到各向同性情况
其中
并且 ,。 (6.39)
定义下列矩阵
则(6.34)的剩余子矩阵由下式给出
这些关系在参考文献[6.3]中导出。
与在惯量矩阵的情况下一样,用表达式(6.8)代替和{}后使用(6.30)进行集成。在文献[6.4]中,这一过程被推广到许多具有各向异性材料特性的板单元。
将(6.17)代入(6.4)得
其中
是单元等效节点力矩阵。假设Pz为常数,用(6.19)代替lfloor;Nrfloor;,积分得到
板中任何点的应力由(2.63)给出
从(2.65)中代入应力得
(6.46)
其中{}定义见(6.3)。使用(6.17)代替{}中的得
(6.47)
其中[B] 在(6.33)中定义和在(6.18)中定义。因为[B]是x和y(或和eta;)的函数,所以(6.47)给出了点(x,y,z)处的应力,应以节点位移表示。
弯矩Mx和My以及扭矩Mxy和Myx单位长度由下列式子定义:
由于,则Myx=-Mxy。这些力矩的方向如图6.2所示。
将(6.47)代入(6.48)并积分得
其中[I]的定义见(6.40)。
图6.2 弯矩和扭矩的符号惯例
在(2times;2)个积分点阵列上,弯矩和应力都会更精确。
例6.1 使用ACM单元估计四边简支的正方形板的五个最低频率。将结果与解析解rad/s进行比较,其中L是每边的长度,(m,n)是x和y方向的半波数。
由于板有两个对称轴,通过理想化四分之一的板并在对称轴上应用适当的边界条件,可以分别计算出每一个对称轴或反对称轴的模式(第8章)。
图6.3显示了由四个矩形单元表示的板的四分之一。由于边1-3是简支,,theta;y在节点1、2和3处为零。同样,由于边1-7是简支,theta;x在节点1、4和7处为零。通过在3、6和9处设置theta;y为零,以及在3、6和9处设置、theta;x为零,得到相对于3-9侧对称的模型。类似地,通过在7、8和9处将theta;x设置为零,以及在7、8和9处将、theta;y设置为零,获得相对于7-9侧对称的模型。因此,通过考虑12自由度模型,得到了相对于两个对称轴对称的模式,即自由度为在9处的,2和3处的theta;x,4和7处的theta;y,6处的和theta;x,8处的和theta;y,以及5处的,theta;x,theta;y。
图6.3 理想化的四分之一正方形板块
用(2times;2),(3times;3),(4times;4)和(5times;5)网格对四分之一板进行分析。结果与图6.4中的分析频率进行了比较。与前几章给出的例子不同,使用有限元方法预测的频率小于分析频率。这是ACM单元不标准的结果。然而,从图中可以看出,随着单元数量的增加,这并不排除频率收敛到分析频率。文献[6.5,6.6]给出了各种其他边界条件的结果。
图6.4 简支方板的弯曲振动,ACM单元
不能断言ACM单元预测的频率总是小于正确的频率。事实上,预测可以高于或低于真实的预测。如图6.5所示,一对对相对的边简单支撑,另一对自由的方形板的结果说明了这一点。模态模式如图6.6所示。所示的五个模式中有四个从上面收敛,而另一个从下面收敛。
图6.5 简支/自由方板的弯曲振动,ACM单元
图6.6 简支(S)/自由(F)方板的模态模式
例6.2 计算边0.3048m、厚3.2766mm的正方形板的前六个固有频率和模态,该正方形板的四个角是点支承。将结果与文献[6.8,6.9]给出的解析解和[6.7]的实验结果进行比较。取E=73.084times;109N/m,nu;=0.3,rho;=2821 kg/m。
这块板有两个对称轴。因此,四分之一板由(2times;2)和(4times;4)个单元网格表示。对称或反对称边界条件沿对称轴应用。此外,转角节点处的位移设置为零。
预测频率与表6.1中的分析和实验频率进行了比较。模态模式如图6.7所示。注意,有两种模式具有不同的模式2(a)和2(b)具有相同的频率。
表6.1 角支承方板的预测频率比较,ACM单元
图6.7 角支承方板的模态分析
例6.3 图6.8(a)显示了一个单向加筋的矩形板。加筋肋的细节见图6.8(b)。计算前四个模态的频率,方法是考虑等效的正交各向异性板,并假设所有四个边都是简支的。将结果与参考文献[6.10]中给出的解析解进行比较。取E=206.84times;109N/m,nu;=0.3,rho;=7833kg/m。
图6.8 加筋方板的几何形状
等效正交各向异性板的材料轴,与几何轴x,y重合,如图6.8(a)所示。使用参考文献[6.11]中给出的方法,该等效板的弹性常数为
其中
h=未加筋板的厚度
h=等效正交各向异性板的厚度=1.125h
E,Enu;在第2章中定义。
利用给定的E、nu;和rho;的值以及上述关系,可以表明等效正交各向异性板的材料特性为:
用(8times;8)单元网格分析整个板。这意味着有81个节点,每个节点有三个自由度。在243个自由度中,68个自由度为零,这是由于简支边界条件决定的。然后,从剩下的175个自由度中自动选择了77个主自由度(见第11章)。获得的频率见表6.2。并与两组解析预测频率进行了比较。第一组是将板看作离散加筋板得到的。第二组是通过考虑等效正交各向异性板并使用瑞利方法得到的。
表6.2 加筋简支板的预测频率比较
由于单元之间的法向坡度不是连续的,因此本节所述单元是不标准单元。克服这个问题有几种方法,即:
(1) 引入附加的节点自由度。
(2) 确保法向坡度沿边线性变化。
(3) 引入其他节点。
(4) 使用厚板理论和简化积分法(梁的类似处理见第3.10节)。
这些方法将在以下章节中介绍。
6.2矩形薄板单元(标准)
对于均匀的细长梁,可以通过取函数(3.126)的乘积来获得标准的矩形单元。在这种情况下,板的位移函数的形式为(6.17),其中
其中
分别用,eta;代替,得到了eta;的函数。(,eta;j)是节点j的坐标。
仔细检查(6.17),(6.50)和(6.51)定义的位移函数,发现四个节点处的扭曲度/为零。这意味着,在极限状态下,随着使用的单元数量的增加,板材将趋向于零扭曲状态。这可以通过在每个节点处引入/作为附加自由度来克服。在这种情况下,位移函数(6.17)的形式为
其中/,并且
该单元通常称为CR单元[6.12]。
通过指定与刚体位移一致的节点自由度,对应于x轴和y轴的垂直平移和旋转,可以证明该单元可以在不变形的情况下进行刚体运动。同样,对应x和y方向的纯弯曲。(注意,对于函数(6.50)也是如此)。与恒定扭转状态一致的节点位移为
将其代入(6.17)和(6.53)可得出
(6.55)
根据需要。因此,(6.5)中的前六项出现在函数(6.53)中。
单元惯量、刚度和等效节点力矩阵由(6.25),(6.32)和(6.43)给出,其中矩阵lfloor;Nrfloor;由(6.17)和(6.53)定义。这些表达式可通过参考文献[6.4]中给出的组合分析/数值方法进行计算。它们也可以通过分析来评估。如果函数(6.51)用勒让德多项式[6.13]表示,将大大减轻计算负担,如下:
其中
(详见第3.10节)。
这些函数的导数也可以用勒让德多项式表示,即:
函数(6.51)的乘积及其导数的积分现在可以使用以下关系进行计算:
参考文献[6.12]给出了这三个矩阵,参考文献[6.13]给出了刚度矩阵,这两个矩阵都适用于各向同性情况。正交异性情况的延伸可在参考文献[6.14]中找到。
例6.4 使用CR单元重复例6.1。
因为,所以沿简支边缘的边界条件与示例6.1相同。沿对称轴的边界条件与例6.1中反对称模的边界条件相同,但在对称模的情况下,存在为零的附加约束。
有限元和分析频率之间的百分比差异如表6.3所示。此单元的精度比使用ACM单元获得的精度好得多(见图6.5)。事实上,如果按同一比例尺绘制,目前的结果将是微不足道的。另外,请注意,CR单元产生的频率大于精确的分析频率。这是因为瑞利-里兹法的所有要求都已得到满足(见第3.1节)。文献[6.5、6.6、6.15和6.16]给出了各种边界条件的结果。
表6.3 简支方板的预测频率与分析频率的比较,CR单元(差异百分比)
例6.5 使用CR单元重复例6.2。
分析与示例6.2完全相同,只是现在每个节点有四个自由度,而不是三个自由度。此外,对于围绕对称轴对称的模式,还存在为零的附加约束。
预测的频率与表6.4中的分析和实验频率进行了比较。与表6.1的比较表明,用CR单元预测的频率低于用ACM单元预测的频率。
表6.4 角支承方板的预测频率比较
尽管CR单元比ACM单元更精确,但由于自由度的存在,在分析组合结构(见第7章)时很难与其他单元结合使用,这是一个缺点。因此,参考文献[6.17]引入了近似值
将(6.60)代入(6.17),(6.52)和(6.53)并加以简化,表明的形式为(6.17),其中{w}被给出通过(6.18)和
其中
()是节点j的坐标。该单元称为WB单元。
对CR单元应用约束(6.60)的效果是使其成为不标准单元。单元间位移和切向坡度是连续的,而法向坡度不是连续的。
例6.6 使用WB单元来估计边长2.4 m和厚0.03 m的方形板的
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[240350],资料为PDF文档或Word文档,PDF文档可免费转换为Word



