基于无线传感器网络的水产养殖智能监控系统设计外文翻译资料
2022-08-09 20:02:56
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
基于无线传感器网络的水产养殖智能监控系统设计
摘要—基于多目标的智能监控系统
采用BP神经网络设计了基于无线传感器网络的水产养殖环境 因素。该系统使用无线传感器节点来检测通过水槽节点无线传输到现场监控主机的各种水质参数。控制模块由模糊控制器和解耦神经网络组成,无需环境模型识别。使用GPRS无线通信技术的远程监控计算机可对水产养殖进行远程数据收集和监控,以实现智能控制和信息共享。
关键词—水产养殖;智能控制;神经网络;无线传感器网络
I.介绍
自1980年代以来,中国的水产养殖业蓬勃发展,已从传统的粗养方式逐步转变为工厂自动化和数字化。在现代工业化水产养殖中,多环境因素在智能监控系统中的应用越来越受到关注[1]。因此,开展水产养殖监控 系统的数字化关键技术研究和应用工作,促进水产品高效健康养殖和可持续发展,建立水产养殖环境自动监测系统,使环境控制文化处于最佳状态。高效育种,必将成为未来农业产业化的趋势。
为了提高工业化水产养殖的水平,中国从国外引进了许多现代化的工业化水产养殖设备和控制系统。但是, 这些设备和系统价格昂贵,运行成本高,难以在国内推广普及。同时,在某些受限环境中,有线通信的应用更加困难且成本更高,远远不能满足水产养殖需求的进一步发展。该系统采用多参数水质检测和GPRS的无线通讯技术和Internet技术的远程监控计算机的无线传感器网络组成计算机的无线监控系统。该系统可以远程收集和控制水产养殖池塘的温度,氨氮含量,浊度,溶解氧, PH值,水位和其他重要的环境因素[2]。
II.系统组成
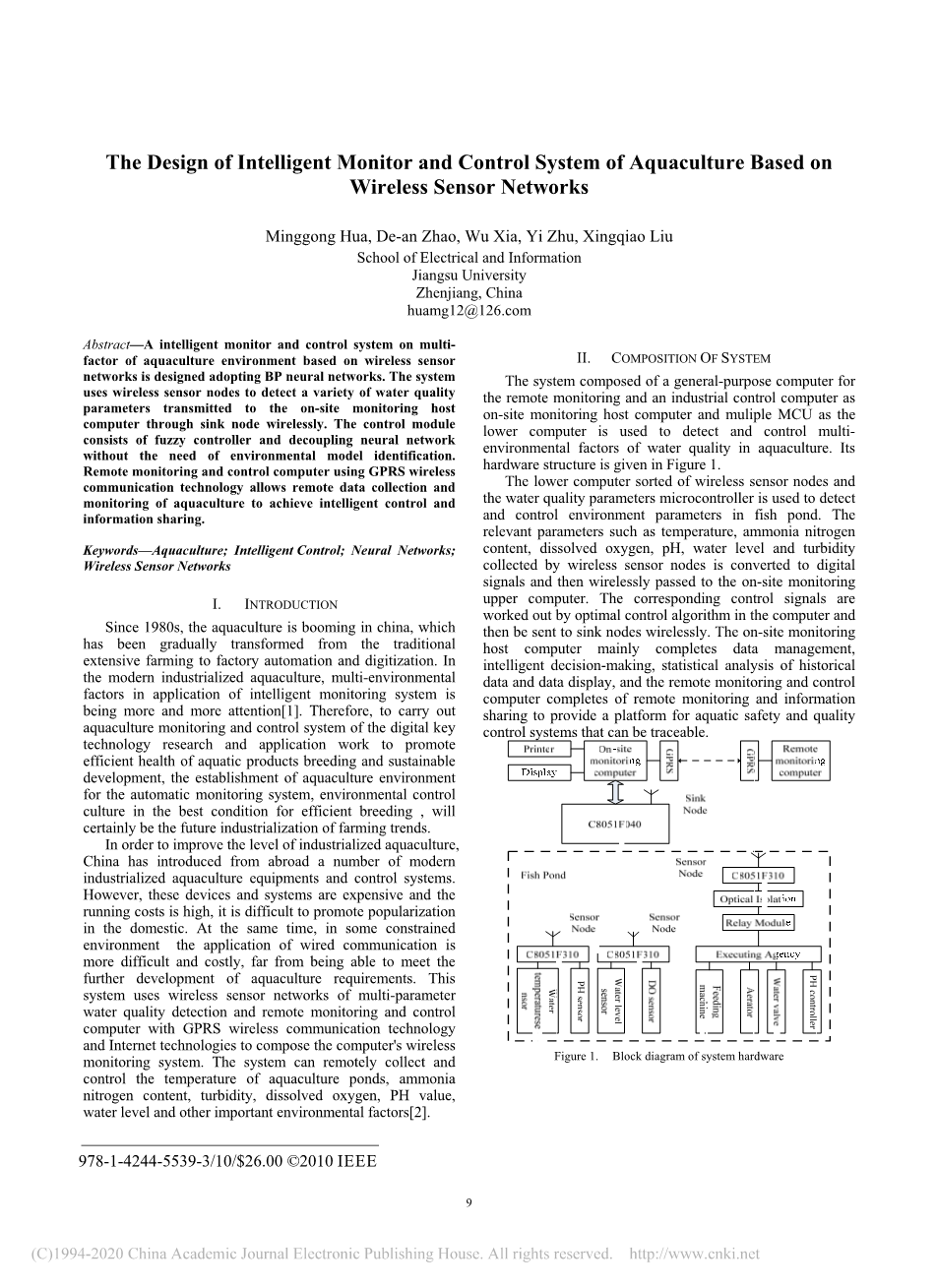
该系统由用于远程监控的通用计算机和作为现场监 控主机的工业控制计算机以及作为下位计算机的多个MCU组成,用于检测和控制水产养殖中水环境的多种环境因素。其硬件结构如图1所示。
下层计算机由无线传感器节点和水质参数微控制器 组成,用于检测和控制鱼池中的环境参数。无线传感器节点收集的相关参数(例如温度,氨氮含量,溶解氧, pH,水位和浊度)被转换为数字信号,然后无线传递给现场监控上位机。相应的控制信号通过计算机中的最佳控制算法进行计算,然后无线发送到接收节点。现场监控主机主要完成数据管理,智能决策,历史数据统计分析和数据显示,远程监控计算机完成远程监控和信息共享,为水生安全和质量控制提供平台可以追溯的系统。
图1.系统硬件框图
A.传感器节点的结构
传感器节点的硬件元件组成如图2所示。通常应包括 以下五个单元:传感单元,处理单元,通信单元,时间同步单元和电源单元[3]。传感节点通常包括水质参数 传感,信号放大和整形,数据处理和存储,无线传输和电源等几种功能[4]。
图2.传感器节点的硬件元素
下沉节点
无线传感器网络(WSN)应用环境中的接收器节点至关重要。它是WSN节点与现场监控计算机之间的链接, 可实现堆栈之间的通信协议转换。同时,它释放管理节 点的监控任务并收集转发到外部网络的数据。汇聚节点 的任务是从传感节点收集数据,然后进行数据检查和数 据成帧,并重新排列数据并将其转发给现场监控计算机。接收器节点的结构如图3所示。
图3接收器节点的框图
C.单个鱼塘的星形拓扑
传感器节点的通信在宿节点上中继以传输数据。如 果某个传感器节点需要向另一个节点传输数据,则首先将数据发送到宿节点,然后再将数据重新传输到宿节点已标识的另一个传感器节点。接收器节点不仅将数据和命令传输到无线传感器节点,而且还连接到监视主机。
现场监控主机控制水槽节点,收集水质参数。由宿节点组成的星形拓扑网络负责处理整个网络的数据传输 和网络操作。这种拓扑网络结构不仅简单且总功耗较低, 而且适用于集中的小型水域或鱼塘,如图4所示。
图4.单池的星形拓扑
III. 水质参数控制算法
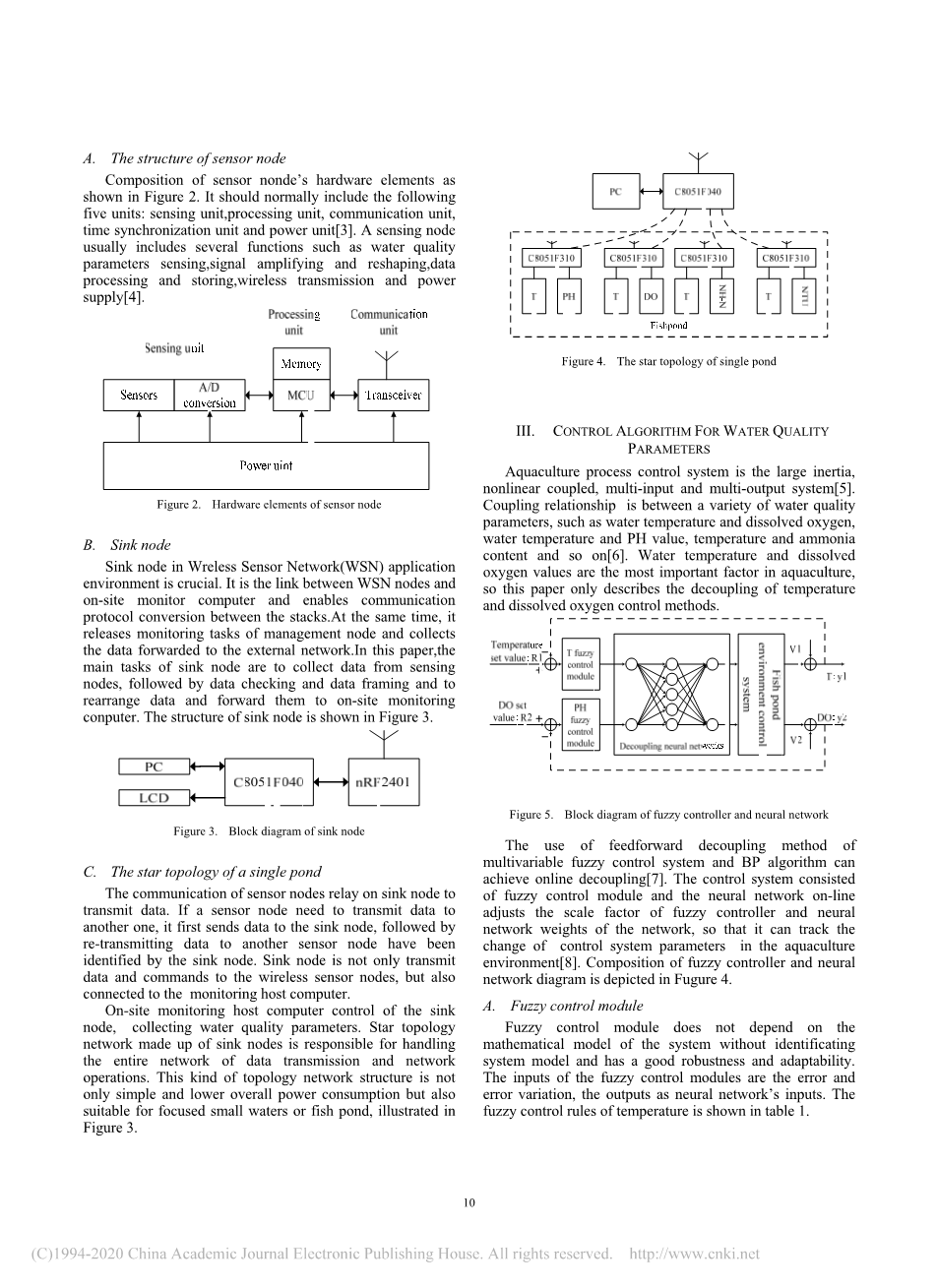
水产养殖过程控制系统是大惯性,非线性耦合,多 输入多输出系统[5]。耦合关系存在于多种水质参数之 间,如水温与溶解氧,水温与PH值,温度与氨含量等[6]。水温和溶解氧值是水产养殖中最重要的因素,因此本文仅描述温度和溶解氧控制方法的分离。
图5.模糊控制器和神经网络的框图
多变量模糊控制系统的前馈解耦方法和BP算法可以实现在线解耦[7]。控制系统由模糊控制模块和神经网 络组成,在线调整模糊控制器的比例因子和网络的神经 网络权重,从而可以跟踪水产养殖环境中控制系统参数 的变化[8]。模糊控制器和神经网络图的组成如图4所示。
A.模糊控制模块
模糊控制模块在不识别系统模型的情况下不依赖于 系统的数学模型,具有良好的鲁棒性和适应性。模糊控制模块的输入是误差和误差变化,输出是神经网络的输入。温度的模糊控制规则如表1所示。
表一. 温度的模糊控制规则
其中:E是温度误差;EC是温度变化率
错误;Discouse域的NB,NM,NS,Z,PS,PM,PB的等级为7。
模糊控制规则的建立是模糊控制的关键。控制参数数量的选择原则是:当误差较大时,应选择控制量以尽快消除误差;当误差较小时,应采取控制措施以避免超调。在本文中以系统的稳定性为主要目标,设计了一种具有调节因子的模糊控制器,由模糊控制和两个部分的并联作用组成,设置规则为U = aE (1-a)EC。校正因子的范围为0~1,反映了偏差的权重和偏差的变化。
B.去耦神经网络
人工神经网络人工神经网络(ANN)技术是一种人工智能的形式,它通过其内部体系结构[9]处理具有代表性的数据模式来学习,神经网络得到了广泛的应用,最常用的体系结构通常有三层,包括输入层、一个隐藏层和一个输出层。 神经网络训练的解耦错误反向传播算法,即BP算法,用于双输入双输出非线性系统。
学习过程中的开环神经网络解耦问题,分为两个阶段:一个是前馈计算阶段,另一个是反向调整。 在第一阶段,输入信息通过输入层和隐藏层到达输出层,其中每一层的神经元状态只影响下一层。如果输出层没有预期的输出,则输出层的误差变化将被计算出来。 然后进入第二阶段,误差信号沿网络中的原始连接路径反通.. 然后重新进入前馈阶段,修正每一层神经元的值,并重复这样的训练,直到达到预期的目标。
本文解耦模块采用两层BP神经网络,包含2个输入节点、5个隐藏节点和2个输出节点。 通过解耦神经网络将输出限制在0到1之间,以0.5为边界来控制开关输出。 小于0.5时状态关闭,否则打开。控制信号通过水槽节点发送到鱼塘内的控制机构。
该系统的神经网络输入输出关系的p(p=1,2,...,P)样本的系统神经网络如下
- .输入层
输入:
输出:
(2).隐藏层:
输入:
输出:
(3).输出层:
输入:
输出:
误差函数(En)是(7)中描述的期望输出与实际输出之间的平方差之和.
采用最陡下降法中的非线性规划,根据误差函数的负梯度方向修改权值和阈值。修改权重值和阈值的公式如下:
在这里:I是输入层节点的下标变量,j是隐藏层节点的下标变量,k是输出层节点的下标变量。是输入层和隐藏层之间的权重;是输入层和隐藏层之间的阈值;是输出层和隐藏层之间的权重;是输出层和隐藏层之间的阈值。
隐层和输出层的激活函数是神经解耦控制器中的Sig模态函数,随机选取500个覆盖范围内的样本 神经解耦控制器中隐层和输出层的激活函数,随机选取500个覆盖范围内的样本使用其中的400个作为权重训练样本,然后再使用100个样本测试去耦功能。训练过程由MATLAB神经网络工具箱完成,通过(8),(9),(10),(11)调整BP网络权重和阈值,以实现神经网络训练可以获得最优的解耦控制信号。送至鱼池外控装置的适当水质参数。
IV.模拟
仿真结果如图5所示。初始温度为20℃,假设设定值 为24℃,则初始温度为20℃。假设模拟系统中的设定值为7.5 mg / L,则初始溶解氧为8 mg / L。
这是一个强耦合的两输入双输出系统;y1和y2是鱼 池中的温度和溶解氧。具有2-5-2结构的神经网络的学习速率为0.1。开始时,模糊控制器的权重校正因子(a)值为0。当误差大于1时,将去耦网络和模糊控制器 的校正系数调整为0.3和0.7。从图6可以看出,控制过 程几乎没有过冲和稳态误差,显示出强大的抗干扰能力和鲁棒性。延迟时间约为1s,调整时间约为9s。
图6.温度和溶解氧控制的仿真曲线
V.结论
该智能系统高度集成,实用,科学并且对水产养殖 环境具有适应性。应用模糊控制器和神经网络解耦控制水产养殖环境中的溶解氧和温度对提高水产养殖的控制水平具有重要的理论和实践意义。具有智能管理功能的现场监控主机可以分析和优化无线传感器网络传输的温度,溶解氧,pH值和其他信息,通过自适应设置控制参数使控制系统处于最佳状态。该系统采用GPRS技术,方便了异地的远程监控。
参考资料
[1]赵德安,刘兴桥,“工厂水产品繁育远程监控系统”,第25届中国控制会议论文集,2006年,第1677-1680页。
[2]徐伟,赵德安,“水产养殖中溶解氧的检测与控制技术研究”,
《农机化研究》,2007(1),pp.74-77。
[3]杨海青,吴宏喜,“用于监测海洋贝类水生环境的无线传感器网 络架构”,第七届亚洲控制会议论文集,2009年,第1147-1151页。
[4]朱秀娜等,“集约化养殖水质在线监测的远程无线系统”,农业计算机与电子技术,2008,pp.53-58。
[5]Baily DL和Thomson DM“开发神经网络应用程序”, AI专家, 1990年9月,第35-40页。
[6]徐伟,赵德安,“水产养殖中溶解氧的检测与控制技术研究”,
《农机化研究》,2007,pp.74-77。
[7]Seginer I.,“一些人工神经网络在温室环境控制中的应用”, 农业计算机与电子学,1997年,第167-186页。
[8]Y.Bai,“磨粉机粉煤解耦控制的研究系统篇 基 于
上神经网络”,沈阳,东北大学,1998。
[9]张继立,“模糊-神经网络控制理论与工程应用”,哈尔滨工业大学出版社,哈尔滨2004.6。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238725],资料为PDF文档或Word文档,PDF文档可免费转换为Word



