基于PID控制器的单相异步电动机调速离心纺丝装置外文翻译资料
2022-08-13 15:40:54

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
可以在线获得www.sciencedirect.com
科学指导
Procedia Engineering 170 (2017) 404 – 409
工程物理国际会议,EPIC 2016
基于PID控制器的单相异步电动机调速离心纺丝装置
Yogie Sanjayaa,b, Ahmad Fauzia,b, Dhewa Edikresnhaa,b, Muhammad Miftahul Munira,b,*,
Khairurrijala,b
a数学与自然科学学院物理系
b生物科学与生物技术研究中心,
万隆市加内萨10号,万隆市,Teknologi Bandung研究所,邮编:40132,印度尼西亚
摘 要
离心纺丝(RFS)是一种简单的高生产率、低成本的纤维制备方法。它可以通过改变聚合物浓度,溶液流速和感应电动机的速度来改变纤维的形态。电动机的速度变化会影响纤维的直径分布。因此,必须使用PID(比例积分微分)控制器,以保持纤维生产过程中速度的稳定性。用一个调光电路来控制交流电压,将此交流电压提供给感应电动机;使用带有信号调理器的旋转编码器来测量电动机速度,以此来调节电动机速度。通过应用Ziegler-Nichols整定的第二法则,得到PID控制器常数,即Kp,Ti和Td。它们的值分别为0.001242、5和1.25。从控制系统对16,000到28,000 转/分范围内设定响应点,可以看出控制系统响应迅速。另外,通过控制系统还获得了在24,000 转/分处的最大超调345 转/分和在28,000 转/分处的最大稳态误差335 转/分。在给控制系统5 s干扰时,速度可以在34 s内恢复至其原始状态。因此,该调速系统可被认定为一种良好的控制系统。
copy;2017作者。由Elsevier Ltd.发布。这是CC BY-NC-ND许可下的开放获取文章(http://creativecommons.org/licenses/by-nc-nd/4.0/).
copy;2016作者。由Elsevier Ltd.发布
2016年工程物理国际会议组委会负责的同行评审
关键词:调速;单相感应电动机;调光器;比例积分微分;旋转力旋压。
介绍
离心纺丝(RFS)是一种相对较先进的纤维制造方法,具有较高的生产率和较低的生产成本,因此非常适合纤维的批量生产[1]。另外,RFS方法的组成很简单,前体溶液的电导率不会影响形成的纤维质量,这与静电纺丝是矛盾的[2]。RFS法可以通过改变聚合物浓度,溶液流速和感应电动机的速度来控制纤维的形态。此外,聚合物浓度的变化会影响纤维的直径,而电机速度的变化会影响纤维直径分布[3]。
但是,由于纤维形态的控制参数有限,需要对这些参数进行优化以获得高质量的纤维。可以优化的参数之一是感应电动机的速度,而电动机速度可以通过改变交流电压值来调节[4]。此外,感应电动机速度的稳定性会影响到纤维的直径分布,因此控制感应电动机速度是十分必要的。所以,我们需要适当的控制系统来调节感应电动机的速度。为了保持所需的系统输出,可以使用PID(比例积分微分)控制器[5-7]。
本文研究了RFS中使用的单相感应电动机的调速系统的设计和开发。为了调节提供给感应电动机的交流电压,使用了具有相位切割法的调光电路。
*通讯作者。电话: 62-022-2500834;传真: 62-022-2506452。
电子邮件地址:miftah@fi.itb.ac.id
1877-7058copy;2017作者。由Elsevier Ltd.发布。这是CC BY-NC-ND许可下的开放获取文章(http://creativecommons.org/licenses/by-nc-nd/4.0/).
2016年工程物理国际会议组委会负责的同行评审
doi:10.1016/j.proeng.2017.03.065
PID控制器用于使感应电动机维持速度稳定。控制器常数使用Ziegler-Nichols整定的第二法则确定。调速系统的响应速度也通过对电动机施加干扰来进行测试。
- 调速系统设计
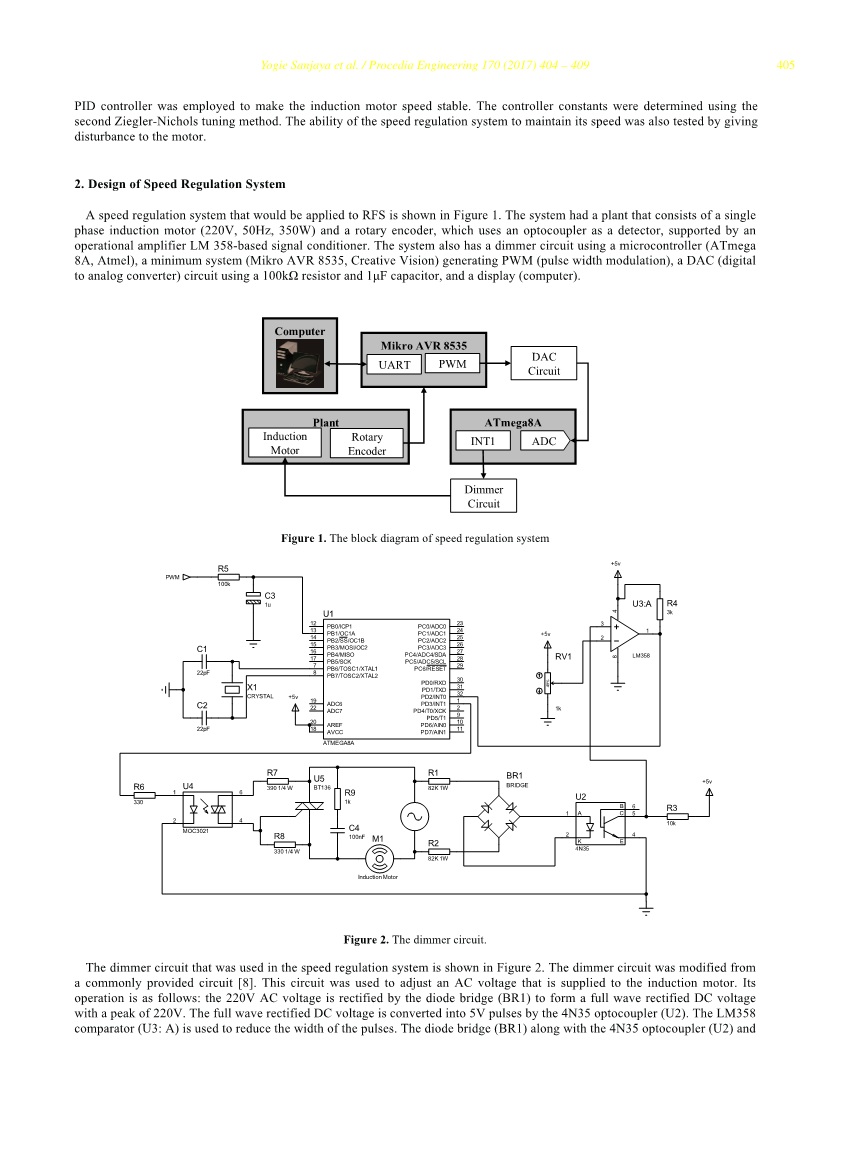
图1中显示了将应用于RFS的调速系统。该系统的工厂部分由一个单相感应电动机(220V,50Hz,350W)和一个旋转编码器组成,该旋转编码器使用光耦合器作为检测器,并设计了基于运算放大器LM 358的信号调理器器。该系统还具有使用微控制器(ATmega 8A,Atmel)的调光器电路,产生PWM(脉冲宽度调制)波的最小系统(Mikro AVR 8535,Creative Vision),由100kOmega;电阻与1mu;F的电容器构成的DAC(数模转换)电路和一个显示器(计算机)。
computerr
Mikro A VR 8535
DAC
Circuit
图
plant
ATmega8A
ADC
电
PWM
UART
Dimmer
Circuit
INT1
Rotary
Encoder
Induction
Motor
图1.调速系统框图
图2.调光器电路
调速系统中使用的调光器电路如图2所示。调光器电路是从常用电路[8]修改而来的。该电路用于调节提供给感应电动机的交流电压。其操作如下:通过二极管电桥(BR1)对220V交流电压进行整流,以形成峰值为220V的全波整流直流电压。全波整流的直流电压通过4N35光耦合器(U2)转换为5V脉冲。LM358比较器(U3:A)用于减小脉冲宽度。二极管电桥(BR1)以及4N35光耦合器(U2)和
LM358比较器(U3:A)称为过零检测器。LM358比较器生成的5V脉冲作为ATmega 8A(U1)的外部中断信号,以开始切相过程。在相切过程中,MOC3021三端双向可控硅开关驱动器(U4)和BT136三端双向可控硅开关(U5)用作将交流电压提供给感应电动机(M1)并控制其功率的开关。为了触发双向可控硅驱动器(U4),使用了来自Atmega 8A的INT 1端口的信号。缓冲电路由1kOmega;电阻(R9)和100nF电容器(C4)组成,用于保护双向可控硅不受电动机产生的感应电流的影响。由100kOmega;电阻(R5)和1mu;F电容器(C3)组成的低通滤波器(LPF)充当图1所示的DAC电路。
图3. PID控制器的框图
图3中显示了应用于速度调节系统的PID控制器。E(t)表示测得的速度B(t)与期望速度R(t)之间的差值,G(t)表示控制器输出,它是比例,积分和微分控制动作的求和结果。来自调光器的交流电压的变化用C(t)表示。为了获得在PID控制器中使用的控制器常数,采用了Ziegler-Nichols整定的第二法则。
测试结果与讨论
通过提供220V电压和50Hz频率的交流电源线来检查二极管电桥和过零检测器。一对电阻器R1和R2(见图2)限制了施加到二极管电桥的交流电源。图4(a)和(b)分别显示了二极管电桥(BR1)和过零检测器(LM358)的输出。出于安全考虑,使用具有降压变压器的示波器来减小其峰值,以捕获图4(a)中给出的全波整流DC电压。图4(a)中显示,经全波整流的直流电压的频率为100 Hz。图4(b)显示了一系列脉冲,其峰值为5V,频率为100Hz。因此,图4(a)和4(b)已确认二极管电桥和过零检测器正常工作。
图4.(a)全波整流的直流电压和(b)过零脉冲
调光器电路和旋转编码器通过改变感应电动机的速度进行了测试。图5(a)显示了调光器电路输出交流电压(黄色/上线)和旋转编码器输出信号(蓝色/下线),处于低速状态。图5(b)显示了调光器电路输出的交流电压和旋转编码器的输出信号,处于高速状态。旋转编码器的输出信号已确认了感应电动机速度的变化。通过比较图5(a)和5(b)可以看出,当感应电动机速度变大时,旋转编码器输出信号的频率变高,并且提供给感应电动机的功率增加。高速和低速时的功率差异是由切掉的交流电压的相位引起的,其中,低速时的切入相位大于高速时的切入相位。当交流电压的截止相位变大时,提供给感应电动机的功率变小。
图5.(a)低速和(b)高速时,调光器电路(黄线/高线)和旋转编码器(蓝线/低线)的输出
设定点(所需速度)由计算机确定,测得的速度也发送到计算机。PID控制器能够根据误差确定提供给感应电动机的交流电压,该误差为速度设定值与测量值之间的差。如果测量值低于设定值,则交流电压的截止相位变小,提供给感应电动机的功率变大。当感应电动机的速度随着所提供功率的增加而增加时,速度将接近设定点。当感应电动机速度达到设定点时,提供给电动机的功率将减小,直到感应电动机速度达到设定点为止。PID控制器常数会影响速度调整过程中达到设定点的时间,超调量以及稳态误差值。采用Ziegler-Nichols整定的第二法则来得到合适的PID控制器常数。
图6. Kp为0.00207的系统响应,用于调整PD控制器
在确定PID控制器常数时,首先要做的是通过反复试验方法更改比例常数(Kp=0.00207)的值来测试系统响应。所获得的系统响应必须为如图6所示的周期波的形式。通过改变Kp值进行调速系统响应测试,在20000转/分时将Kp分别更改为0.001、0.002、0.00205、0.00207、0.0021和0.003。系统响应是每个Kp值处的周期波,但在Kp=0.00207处获得了稳定的周期波,如图6所示。该结果用于调整控制器常数,以便控制系统的输出在短时间内以较小的超调量达到设定点。根据稳定的周期波,可以确定极限增益(Ku)为0.00207,极限周期(Tu)为10 s。通过Ziegler-Nichols整定的第二法则[7]给出的公式,可以获得PID控制器常数的值。表1列出了获得的PID控制器常数。
然后将获得的P1ID控制器常数应用于PID控制器。控制系统对设定点16,000、20,000、24,000和28,000 转/分的响应如图7所示。实验表明,其稳定时间为25、36、50和69 s,上升时间分别为23 、28、35和47 s。控制系统在设定点24,000 转/分时有最大345 转/分超调,在设定点28,000 转/分时有335 转/分的稳态误差。由于它们只需要很短的时间就能达到稳定,这意味着控制系统具有快速响应的能力,可以被认定为一个好的控制系统[6]。
图7.控制系统对设定值16,000、20,000、24,000和28,000 rpm的响应
图8显示了速度调节系统在受到干扰时的抗扰性。将控制系统设置为20,000 转/分的速度,并在50 s时给出5 s的干扰。感应电动机的速度降低到其初始速度的65%,并且可以在34 s内恢复到其原始状态。由于它能够快速恢复,可以证明控制系统具有良好的抗扰性。
图8.带有干扰的控制系统响应
结论
本文成功开发了用于离心纺丝设备中的单相感应电动机的调速系统。应用了PID(比例积分微分)控制器,以将感应电动机的速度保持在所需值。通过使用Ziegler-Nichols整定的第二法则,获得PID控制器常数(Kp,Ti和Td);它们分别是0.001242、5和1.25。观察到控制系统对设定点在16,000到28,000 rpm范围内的响应,发现控制系统具有快速响应的能力。此外,控制系统在设定值24,000 转/分时有345 转/分的最大超调,在设定值28,000 转/分时有335 转/分的最大稳态误差。当给控制系统施加5 s的干扰时,速度可以在34 s内恢复到其原始状态。因此,该调速系统被认为是一种良好的控制系统。
致谢
在2016年,这项工作得到了“ Unggulan Perguruan Tinggi(PUPT)
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236058],资料为PDF文档或Word文档,PDF文档可免费转换为Word



