基于高频电流幅值法的永磁同步电机外文翻译资料
2022-09-05 16:29:29

英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
基于高频电流幅值法的永磁同步电机
无速度传感器控制
【摘要】高频(HF)信号注入法是永磁同步电机(PMSM)无速度传感器控制的一个既定方法。但是在稳定运行时,瞬时状态仍然是这种方法的一个挑战,特别是对非常小的各向异性电机。本文介绍了稳定的传感器控制方案的新方法。高频电流的幅度可以显示所测量的dq坐标系和实际的转子位置的差异。其计算值是根据对一个PMSM混合式步进电机进行理论观察和实际测量的比较而得出的结果。有几问题可以用来确定一个电机是否适合用这种方法来解决。最后,新的控制方案的有效性会通过对现有传感器混合式步进电机的控制来验证。
关键词:高频(HF)信号注入 永磁同步电机 传感器控制 信号处理
1引言
无传感器控制的主要优点是减少成本和更高的可靠性,因为需要一个机械传感器测量速度降为零时的电机位置。使用速度依赖性反电动势(参见[1] - [3]),非常精确和鲁棒的无传感器控制可以实现。不幸的是,反电动势信号太小,很难得到在较低速度下转子的可靠位置信息。并且在静止的状态下,将没有反电动势,该方法失败。
当反电动势方法失败时,另一组技术必须要应用到测量转子的位置和速度中。这些技术(见[4] - [11])注入的高频(HF)电压信号进行跟踪空间凸极。经过各种方法(参见[10] - [14])的测试,最终得到用HF电流来估计转子的位置。一般,由永磁同步电机(PMSM)内部的永久磁铁引起的凸极饱和和同一方向取向的建设性凸极被用于测量转子的位置。此外,对于这种方法来说,大多数机器具有更改位置信号和造成错误与失败的一个不必要的凸极。由于这些凸极严重依赖电机的几何形状,范围较广的显著组合已被发现(参见[13]和[15] - [17])。
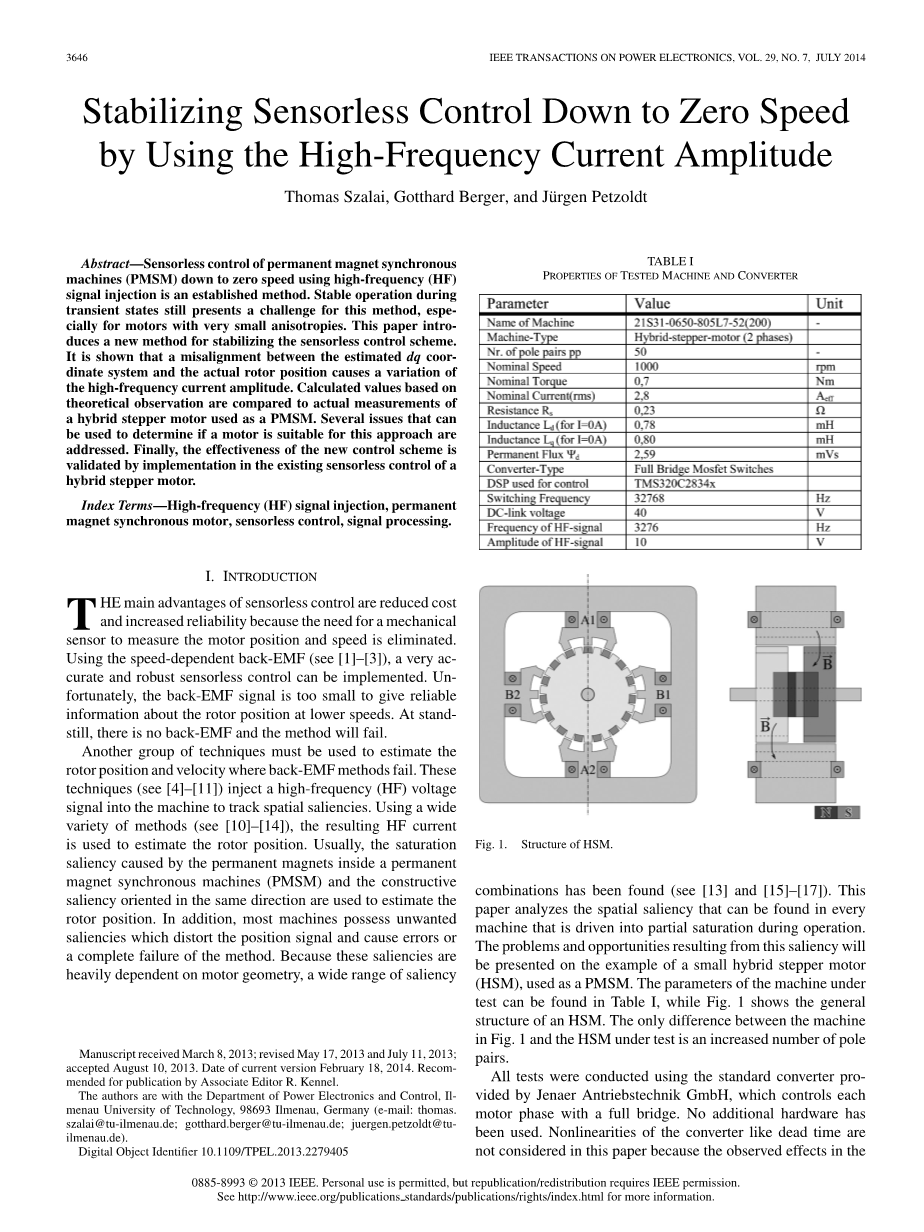
本文分析了电机正在运转时驱动进入部分饱和时都会显现的空间凸极机。这些显著问题是由于把一个小的混合步进电机作为永磁同步电动机的例子来呈现(HSM)时而导致的。电机的测试参数见表1,而图1示给出了一个一般的HSM的结构。图1的电机和测试的HSM唯一区别在于极对数的增加。
所有的测试均是利用由JENAER ANTRIEBSTECHNIK GmbH提供的标准转换器进行的,且每相为全桥控制,不需要使用额外的硬件。该转换器的非线性死区时间在本文中没有被考虑到,因为在实验装置所观察到的影响是至少比分析的空间凸极少一个数量级。
表1 被测电机和换流器的属性
图1 高速存储器的结构
表2 符号和含义
2带可变电感的永磁同步电机(PMSM)
2.1高频信号注入
如在[4]中所描述的旋转电压空间相量的注入被选择为基本的HF技术来实现。该基波调制需用额外的在定子坐标系以固定频率旋转的电压空间相量来调节。这个产生的电流空间相量以相同频率旋转,该频率 由不对称电机产生的正序分量和负序分量组成。由信号注入产生的高频电流可使用电压方程式中的转子坐标系来计算永磁同步电机相关测量值。
(1)
对于高频信号,由于定子电阻RS产生的电压降可以忽略不计,其包含的gamma;也可以被忽略因为转速非常低,从所得的高频模型为
(2)
在定子坐标中高频电流被计算为
. (3)
实际的转子位置信号包含在高频电流的负序分量中,其通过双转子的序列位置(2omega;T)调制。位置信号用广为大家所熟知的带通高通组合[21]提取,其可在图2中看出。
使用带通过滤出的基波电流之后,高频分量被旋转到正序列的坐标系,再施加高通。在此处,只剩下负序高频电流:
. (4)
当多一个量转变为负序列坐标系时,就需要无传感器控制来确定位置信号。
. (5)
图2 从含有高频分量的定子电流中提取的位置信号的带通高通组合。
2.2可变电感的影响
在(1)-(5),所述差分电感Lsigma;q和Lsigma;d被假定为常数,如果电机中出现额外的凸极,该情况将不存在。这意味着(5)可含有附加术语如(6),其中| ihni|是额外的凸极i的谐波次数和相phi;I的振幅。
. (6)
所得负序高频电流的失真部分将导致无传感器转子角度错误。尽管如此,(5)可以近似作为一个具有足够凸极性和低磁性饱和度的电机,因为失真是比较小的。
然而,额定功率小于1千瓦的小位置控制电动机倾向于增加磁饱和运行,所分析的HSM清楚显示了这一点(参照图3)。在这的情况下,高频电流和饱和磁极之间的相互作用会造成明显的信号失真。 图3是通过向电机相量注入直流电流获得的,其相同相量用额外的高频电压信号调制,该信号的频率和振幅与所使用的无传感器控制方案中的信号相同。通过求解对于电感L的基本公式|U| =| R jomega;L|,得到测量所获得的高频电流的幅度。
2.3数学模型
为了计算失真,有必要引入一个含有可变电感LD,LQ高频电机模型。忽视EMF,它具有以下形式定子坐标:
(7)
一般,在文献中假定正弦电感沿气隙变化并没有额外的空间凸极,作为实际电感的有效近似值。这个电感张量的近似值为
. (8)
然而,具有可变电感的电机模型自然意味着交叉饱和的存在,也就是说Ld和Lq并不是电机内部实际的最小或最大电感。永磁体产生的磁场和电流Iq产生的磁场之间的叠加场会使磁轴朝q轴偏移且伴随着Iq的增大。对于具有高建设凸极性的电机,该区域最小电感朝向q轴偏移可以忽略不计。另一方面,交叉饱和角和磁场偏移角几乎是相同的,如果饱和度为电机各向异性的主要部分的话。图4对理论实验装置使用的电机的两个坐标轴比较,没有考虑建设性显着性方面(Ld= Lq)Psi;d和Psi;q的交点等于交叉磁场角ϕcs 45°(ϕcs = tanminus;1(Psi;q /Psi;d))。然而这一点会因为Id的增加而使Iq偏移(见曲线Id = 0,Id = 1,Id = 2,图4),磁轴的转变仍然是有很重要的意义。考虑到Ld和Lq几乎是相同的测试机、交叉饱和起着重要的作用计算时应考虑电机电感。
因此,电感在LS给出张量
. (9)
. (10)
. (11)
gamma;是实际的转子角而ϕcs是由交叉饱和引起的补偿角。最小电感是纯粹依赖于应用电流矢量的振幅。此外,基波组件id、iq和高频元件ihd,ihq,磁化电流idmag引起相同的气隙磁通用作永磁体的等效计算,结合图3中线性电感的曲线,最小电感值是
. (12)
方程(12)是Ld和Lq有很小差异的有效的近似的一个电机模型,与测试的HSM模型相同。对于电机来说Ld和Lq有很大的不同,所以无论是幅值还是电流空间向量的角度都会影响产生的最小电感。方程(12)在这种情况下不适用。最大的电感达到垂直于磁轴的位置,此时定子没有饱和。如果磁轴偏移,这个不饱和区域将会沿着磁轴偏移。假设当磁轴已经偏移而不饱和情况还没有改变,那么q轴的在iq=0时的电感就是最大电感,对于正在运行的电机点来说。
. (13)
图3 所测试的高速存储器的电感,由于直流电流沿着相同的轴线的注入产生的磁饱和而沿着转子的d轴减少
图4 比较不同的Id,Iq =0,1,2 A q轴和d轴的变化
现在LMin和LMax已知,交叉磁化饱和角ϕcs需要解(8)-(10)式。通常,在每一个电机操作点都需要测量ϕcs。然后使用一个简单的查找表来纠正磁轴和真正的转子轴的偏差。大体上,理论模型可以同样这么做。就像[22]p . 132]所示,反正切函数可以用来近似测量其依赖性。分析了HSM,,可以发现
. (14)
是一个非常精确的近似的测量特性,在图5中可以看到。交叉磁化饱和度通常是在编码器操作中通过比较(5)产生的位置信号和由每个编码器电流给出的实际转子位置来测量。在实验装置中,信号失真由于不必要的特点太显著使得这种方法无法产生精确的结果,而是直接使用傅里叶变换(DFT) 2,应用空间谐波测量位置信号来获取谐波的角度。随着iq的增大而变化的角度对应在图5中显示的交叉磁饱和度角。值得注意的是45度的交叉磁饱和度角比图4中估算的要早。这种差异的最可能的原因是在图4中没有被考虑的电机构造方面。
Ls已知,(6)可以解决可变电感以及由此产生的alpha;-和beta;电压复数方程可以写成
. (15)
. (16)
虚线的地方因素x代表dx / dt。
因为Lalpha;alpha;Lbeta;beta;,Lalpha;beta;是ialpha;和ibeta;的函数,(15)(16)建立了非线性微分方程。一个分析对于这个系统解决方案是不可行的。相反,(7)-(16)被用来模拟电机的饱和行为,从而得到一个一个近似解。
2.4 仿真
仿真模型在MATLAB-Simulink中实现,方程(1)是用来模拟电气部分永磁同步电动机的可变电感从(8)-(16)中得到。复制影响电流的控制回路,这个完整的算法是为了磁场定向控制,最后,带通高通组合需要从电机电流中提取(6)应用到模型中。电机控制回路和电气和饱和度模型的计算所需要的角度作为外部输入。这相当于一台机器外部运行时确保一个常数电机驱动速度更容易分析。
图6(a)展示了取自HSM编译运行的测量值,二次正序空间谐波(h = 2)期望的结果(5),用于无传感器控制。二次负序空间谐波(h =minus;2)代表的高频电流之间在电机饱和时的相互作用。用HSM的电机参数模拟的永磁同步电机用于实验,将h = 2和h =minus;2用离散傅里叶函数来提取的位置信号(6)产生结果图6所示(b),仿真结果与实验非常接近。因为在仿真中没有考虑到构造方面的问题,可变电感是minus;2空间谐波产生的原因的原因。因此,高频电流和机器饱和引起的位置信号失真的假象得到验证。
图5 比较交叉饱和角的测量值和计算值,用JENAER ANTRIEBSTECHNIK GmbH来测试的高速存储器。
图6 空间凸极存在于负序高频电流(a)混合式步进电机的测量值及(b)永磁同步电动机在正Iq、基波在零速和可变电感模拟测量值(测量时omega;=6.281s)
3 凸极性模型
3.1 实现
在实验中发现,负序空间二次谐波的存在导致无传感器方法的失败,对于iqgt; 0.2in,如果没有采取进一步措施抵消它的影响的话。目前,对于无传感器控制最有用的工具之一是[15]中呈现的显著性模型,尽管存在不需要的显著性。
这包括所有显著性的振幅和相位。一般来说,有两种方法可以实现凸极性模型。第一种方法,实际的位置信号和从模型中获得的信号的交叉结果用作错误结果来驱动跟踪观测器,其模型包含发动机的显著性。第二个方法,所有不需要的凸极性从综合位置信号中解耦,只留下所需的特点。这个结果用于通过只包含跟踪特性的模型中获得的信号建立一个交叉结果,再一次驱动跟踪观测器,这两种方法在[15]中有详细的解释。
跟踪观测器需要机械系统的信息而且对参数错误非常敏感。由于这些缺点,跟踪观测器并没有在实验装置中实现。然而,转子角度可以直接从位置信息中计算出来。这意味着第一种方法无法使用。因此,解耦凸极性模型实施如图7所示。解耦的凸极性的振幅和相位被记录在译码器运行时,负序高频电流的固定方向的坐标系放入表中。查表中的一个简单的矢量旋转的阶段和转子角的谐波用于生成从记录的振幅中失真的组件。一旦所有不必要的凸极性i解耦角ϕh,对应于双转子角可以使用笛卡尔极坐标转换来获得。
3.2 实验结果
采用所描述的方法,通过高频电流和电机饱和交叉导致的不需要的凸极性从无传感器位置信号中解耦。生成的无传感器的位置误差模型在编码器运行中(参见图8)plusmn;5,无传感器模型的错误位置信息依然存在,因为不像假设模型,解耦的凸极性并不是一个完美的正弦波。这个精度是足够稳定大多数无传感器控制电机。在我们的方法中(参见图9),操作HSM的无传感器模式显示这是不够的。
在机器改革中,有四个具体点使得无传感器的模式不稳定。这种周期性的行为是由于所需的正序二次空间谐波和不必要的包含负序电流的负序二次空间谐波流相互作用而导致的。对于潜在的原理的简单证明,假设两个谐波的相位都为0,这个综合位置信号可以被写成:
. (17)
使用欧拉公式,(17)可以分离成复杂的公式
. (18)
用公式cos(minus;2omega;t)=cos(2omega;t)和sin(minus;2omega;t)=minus;sin(2omega;t)整理后得到所有信号的振幅如下
.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147261],资料为PDF文档或Word文档,PDF文档可免费转换为Word



