直驱永磁同步风能转换系统的有效功率控制策略外文翻译资料
2022-09-06 11:22:18
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
直驱永磁同步风能转换系统的有效功率控制策略
Omid Alizadeh, Student Member, IEEE, and Amirnaser Yazdani, Senior Member, IEEE
摘要—随着风能转换为电能的日益增加,我们越来越希望能够控制风能转换系统(WECSs)的输出的有效功率,同时保留其最大功率点跟踪(MPPT)功能。本文提出了一种简单的有效功率控制策略,来增强风能转换系统的最大功率点跟踪功能。这基于快速的转矩控制,而不是传统的桨距角控制。本文介绍了上述控制策略在直驱永磁风力发电系统上的实施。上述理论也同样适用于其他类型接口的风能转换系统。本文还介绍了该控制策略的参数整定方法,并且通过数学分析和时域模拟研究证明了该控制策略的有效性。
关键词:控制,阻尼,直接驱动,特征值分析,永磁同步发电机(PMSG),风能
Ⅰ引言
我们希望系统操作员可以控制大规模集成风力发电系统的有效输出和无功输出,来更有效地参与电力系统的控制,例如穿越故障等[1]。虽然电子接口风能转换系统的无功功率可控性已经得到了广泛的研究认可,但有效功率可控性只受到少许关注,至今只用于最大功率点跟踪(MPPT)。
本文提出了对直驱永磁同步发电机的有效输出功率的控制策略[2]。永磁同步发电系统被认为将广泛应用,因为发电机损耗低,维护要求低,以及噪音小[3]。这个有效功率控制策略是基于快速的转矩控制,而不是(慢)桨距角控制[4]-[6]。因此,桨距角不控制实际输出功率,只在涡轮超速下限制机械动力。
快速转矩控制,能激发动力传动系统扭转模式。特别是因为动力传动系统硬度通常与发电机级数成反比[7],因此,永磁同步风力发电机硬度很低。此外,多极永磁同步电机没有内阻尼[8]。如果不减小传动系统振动,就会影响系统工作,甚至可能导致系统不稳定。因此根据通过详细的数学模型和特征值分析,然后补充动阻尼是功率控制的一种策略。该控制策略和它的动阻尼的增加可以帮我们控制WECS 的实际输出,使其在当时的风速下获得最大功率。但是这个动态阻尼策略并不是唯一的,它可能可以通过已发表的技术报告实现[9]-[11]。
Ⅱ直驱风力发电系统的结构
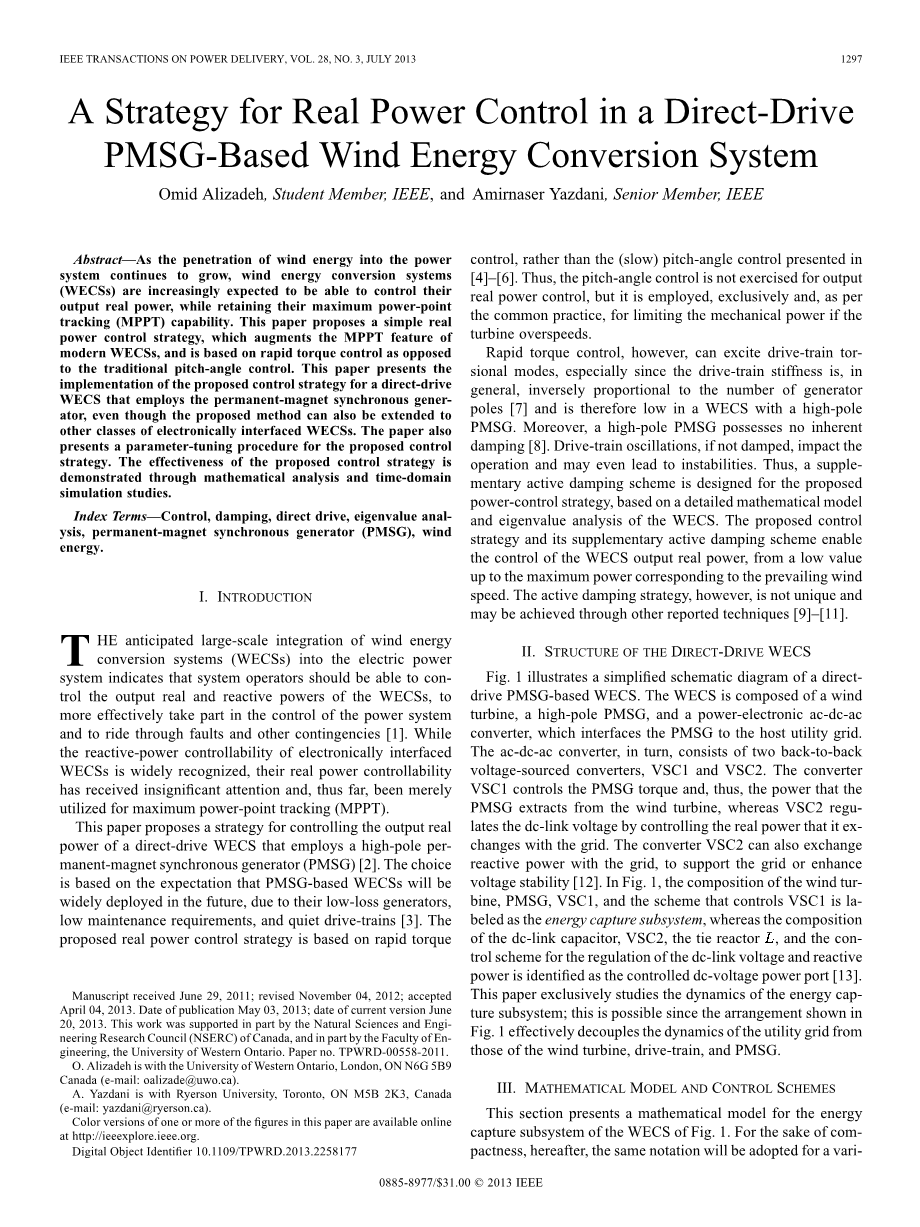
图1表示了永磁同步发电机系统的简化示意图。这个风电系统由风力涡轮机、多极永磁同步发电机和电力电子交流 - 直流 - 交流转换器组成。该转换器是用来连接永磁同步发电机和公用电网的。这个转换器包括了两个背靠背电压源转换器,VSC1和VSC2,VSC1控制PMSG从风力涡轮机吸收的功率,而VSC2通过控制它与电网交换的有功功率来调节直流母线电压,VSC2还可以与电网交换无功功率从而增强电网电压稳定[12]。图1中的风力涡轮机,PMSG,VSC1,以及控制VSC1的方案被统称为能量捕获子系统,而直流母线电容器,VSC2,连接电抗器,直流母线电压和无功调节的控制方案被统称为受控直流电压电源端口[13]。本文专门研究了能量捕获子系统的动态过程,并分别分析了如图1所示的公用电网的风力发电机,动力传动系统和PMSG的动态。
Ⅲ数学模型及控制方案
本节介绍图1的WECS的能量捕获子系统的数学模型。为了严谨,此后,相同的符号将被同一个变量代替和它的拉普拉斯变换形式。此外,上标表示一个变量的基准值(设定值)。
图1.直驱永磁同步发电机简化示意图
- 机械扭矩和动力传动
风力涡轮机的机械转矩如下式所示:
(1)
其中是涡轮转矩(Nm),是涡轮功率(瓦特),是涡轮角速度(弧度每秒),是涡轮半径(米),是空气的质量密度(千克每立方米),是风速(米每秒),涡轮叶尖速比(无单位),是桨距角(度),(无单位)是涡轮机的功率系数[14].
传动系统动态可以用不同复杂程度的模式来描述。然而,根据参考文献[15]和[16],双质量模型足够捕捉到稳定受影响时的动态。高阶模型通常用于研究涡轮传动系统的机械损耗。因此,忽略机械损耗时传动系统是由下列双质量模型表示:
(2)
(3)
(4)
是PMSG的转子速度(弧度/秒),和分别表示惯性涡轮和PMSG的瞬时惯性(),动力传动系统刚度(Nm/ RAD),变量表示驱动系的扭转位移(弧度),表示PMSG转矩(牛顿·米),等式(1)通过(4)构成了能量捕获子系统的状态空间传动系统模型。
B.永磁同步发电机(PMSG)
PMSG转矩控制是经过了旋转变换,即直轴与转子PMSG磁通矢量对齐,如以下一阶传递函数,该变换可以使对应它的变换量:
(5)
时间常数是设计参数[13]。
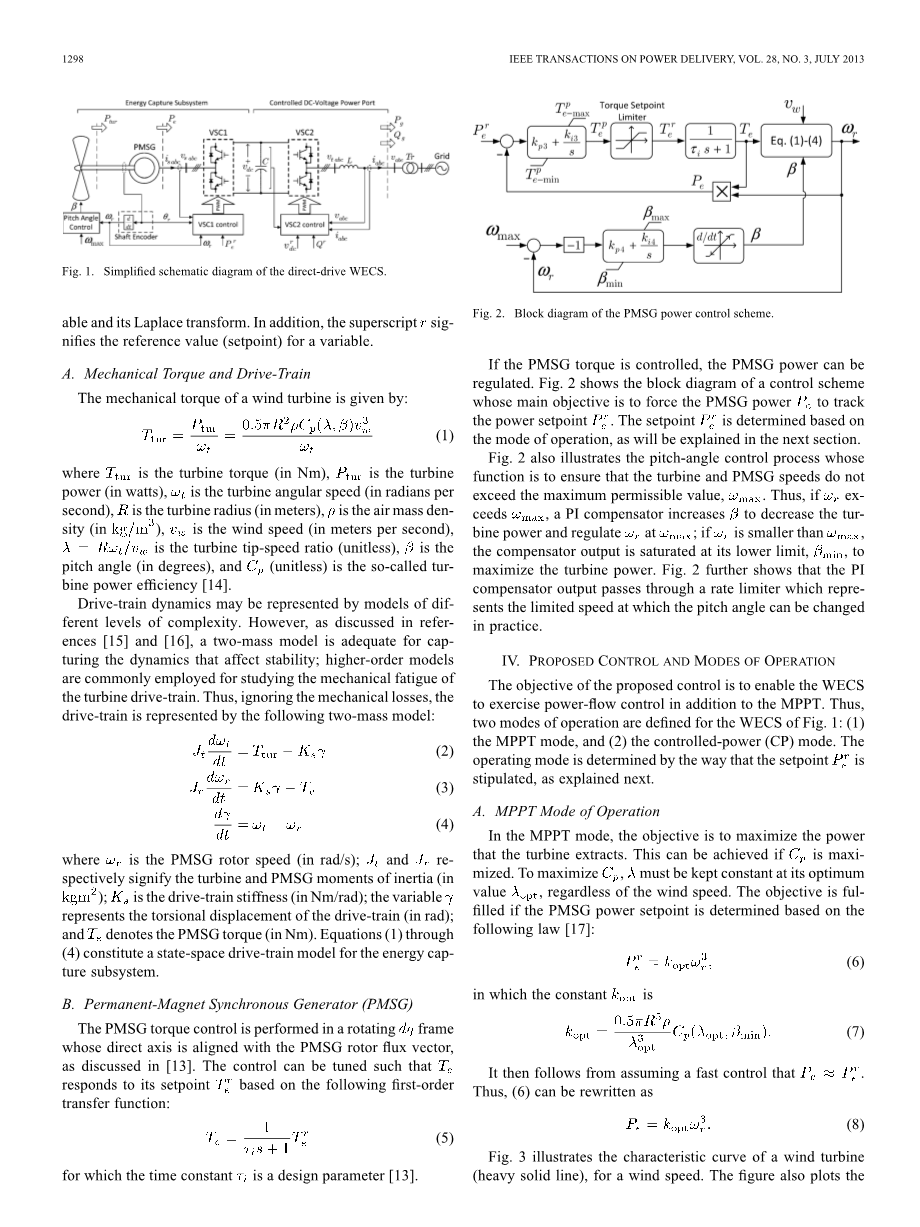
图2. PMSG功率控制方案的框图
如果PMSG转矩是可控的,PMSG功率就可调控。图2表示的是控制方案的框图,其主要目的是让PMSG功率跟踪功率设定点。设定值根据操作模式来确定,这将在接下的部分中进行说明。图2还示出了桨距角控制过程,其功能是确保在涡轮机和PMSG的角速度不超过最大允许值。如果超过,PI补偿器将增大以减小涡轮机功率和如果小于,补偿器输出为其下限饱和,补偿器将会使涡轮发电最大化。图2还表明,PI补偿器输出还受一个速率限制器影响,桨距角在实践中改变时,该速率限制器将会进行限速。
Iv 控制和操作模式
该控制的目的是使WECS受除了MPPT以外的功率控制。两种操作模式都是为了WECS。如图1所示:(1)MPPT模式,(2)可控功率(CP)模式。操作模式是由设定点规定的,接下来将会解释。
- MPPT操作模式
MPPT模式的目标是使涡轮机获取最大功率,最大时可以达到此目的。要想使获得最大值(不计风速影响),必须在其最佳值保持恒定。那么PMSG功率设定点须满足以下定律[17]:
(6)
(7)
假设快速控制下asymp;,公式(6)可改为:
(8)
图3 在某一风速下,两个不同的桨距角值时风力涡轮机的特性曲线即(粗实线)和(亮实线)
图3表示在某一风速下风力涡轮机的特性曲线(粗实线),该图还绘出了PMSG的功率和转子速度。可以观察到,如果WECS是在MPPT模式,工作点稳定在点A(两条曲线的交点),其对应于给定的风速下的最大涡轮功率。
B.可控功率(CP)模式
在CP模式中,目的是在不计风速影响下,在指定值下调节WECS输出功率,所以随变化而变化。让我们假设在初始阶段,WECS是在MPPT模式,,,,随后迅速改变,MPPT模式变换到CP模式。如图3表示,这将导致PMSG功率低于涡轮机功率,并导致变为一个新的值。根据不同的风速,可以比最大允许转子速度大(如图3)。然而这种情况是不符合桨距角控制理论的。因此,一旦大于,桨距角的控制方案要增加但因此改变了风力涡轮机的功率 - 速度特性。为确保PMSG和涡轮功率 - 速度曲线至少具有一个交叉点[见图3],在CP模式被限制为。因此如果太大导致不能超过它在给定风速下的值,将被限制。该系统继续在MPPT操作模式,直到风速在上升(因此增加对应)或系统操作员输入了新的。
图4介绍出了在MPPT模式和CP模式间的选择方法。由和决定。因此和相等时,激发了CP模式,小于时也是如此。除此以外,是等于,能量捕获子系统在MPPT模式下运行。因此,要系统的永久离开MPPT模式,它便要分配给一个充分大的值(例如,额定风速下比大的值)。
图4.框图表示功率设定值的产生。
Ⅴ特征值分析
特征值分析是为了显示能量捕获子系统的动态属性和调整功率控制策略的参数。为此目的,一个线性化模型被开发和分析。以下给出的数值例子是在某情况下的WECS。其参数在附录A中。如图2表示,功率控制的补偿器方案可描述为:
(9)
用代替,我们发现:
(10)
如图2所示,如果忽略饱和值,等于补偿器输出,我们发现:
(11)
消除,然后替代为,公式变为
(12)
能源捕获系统可以用如下的非线性状态空间模型表示:
(13)
和是(相互)控制输入,是个干扰输入,是非线性函数状态变量的载体和输入。应当指出的是:假设一个恒定的桨距角(忽略桨距角控制机制的动态过程)来保持数学模型。此外,忽略动态时,显著的比在状态变量慢。仿真模型是用于评估所提出的控制策略,包括桨距角控制回路(第VII章)。
在MPPT模式中,通过公式(6)可以确定。取两侧相对于时间的导数,可得:
(14)
图5 用绝对值实部做特征值的函数
将和替换,公式变化为:
(15)
和是和矩阵,其元素的功能是表示该系统的稳态运行点,和“〜”表示可变的小信号扰动;矩阵在附录B中有介绍。
对于示例WECS,图5中有绝对值,是主要的特征值的实部,相当于和;主要的特征值被定义为最小的实部的特征值(绝对值),被用来计算=9.0米/秒的工作点。如图5所示,在=1.0,=2.4时值最大。这些值将用于随后的分析中。
在CP模式中,,因此,公式(13)的线性化的形式为:
(16)
表1 能量捕捉子系统特征值 =9.0 =1.5MW
图6. 框图表示主动阻尼控制的实施过程
图7.该主动阻尼方案的控制框图
其中和表示和矩阵,其元素的功能为系统稳态工作点;矩阵在附录B中介绍。表1表示了和的特征值,据观察,在MPPT模式下,系统有两对共轭复数特征值相对应两个稳定但不良的阻尼固有模式。这种情况在CP模式甚至更加糟糕。在CP模式,能量捕获子系统有一个不稳定的振荡模式。因此,在两种主动阻尼机构模式的操作,将在下一节说明。
Ⅵ主动阻尼策略
A.结构
主动阻尼方案是为了增强PMSG转矩给定值,方案如图6所示。由图可看出,转子速度的交流分量通过一个高通滤波器提取。然后,一个补偿器处理零和滤波器输出之间的误差,然后用于PMSG转矩给定值的辅助部件。如图7及图6所示的主动阻尼方案,其目标是(快速)强制零交流分量。
用表示二阶高通滤波器
(17)
其中和是角频率和品质因素,对于示例中的WECS,图8绘制了在CP模式不稳定复共轭特征值的虚部(频率)(参见表I)的曲线,如该图中所表示的,不稳定的模式的频率在大约4.05弧度/秒的范围内变化。在这一频段内,,=0.2rad/s时的结果在和之间。就像在下一小节中所讨论的,纯增益对起着稳定运行的作用。
图8 CP模式中阻尼固有频率的变化
B.特征值分析
lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146913],资料为PDF文档或Word文档,PDF文档可免费转换为Word



