使用近场动力学方法实现粘塑性外文翻译资料
2022-10-22 16:45:23
英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
使用近场动力学方法实现粘塑性
近场动力学方法是基于经典固体力学理论的连续理论重新表达。与经典理论的偏微分方程不同,近场动力学基本控制方程即使是在裂纹或其他变形场中含有奇异性的时候也能适用。原始的近场动力学理论假设大大限制了可模拟的材料响应类型,包括对泊松比的限制。虽然最近的理论发展有望克服这些限制,但目前在实际应用中还没有考虑并论证材料的应变率效应。本文在近场动力学数值理论中提出并论证了一个应变率相关的塑形材料模型。所获得的材料模型数据通过拟合6061-T6铝合金的率相关试验数据而得到。结果显示,采用这种材料模型,近场动力学方法能够精确地再现不同冲击速度下泰勒冲击试验的实验结果。该模型在继承近场动力学表达不连续现象优势的同时,使材料的力学响应具有更大的通用性。
版权:2009 John Wiley , Sons, Ltd.
收到:2008.11.13;修改稿:2009.5.4;接收2009.7.10
关键字:近场动力学方法;近场动力学方法态; 塑性;非局部理论;积分方程;连续介质力学;泰勒冲击。
1.介绍
近场动力学模型[1-3]是经典偏微分运动方程(动量守恒方程)的改进。它已被广泛的用于固体变形的建模,其中,不连续现象(如,裂纹)能够自主的产生。近场动力学基本方程在含有奇点处的变形场中也能适用。
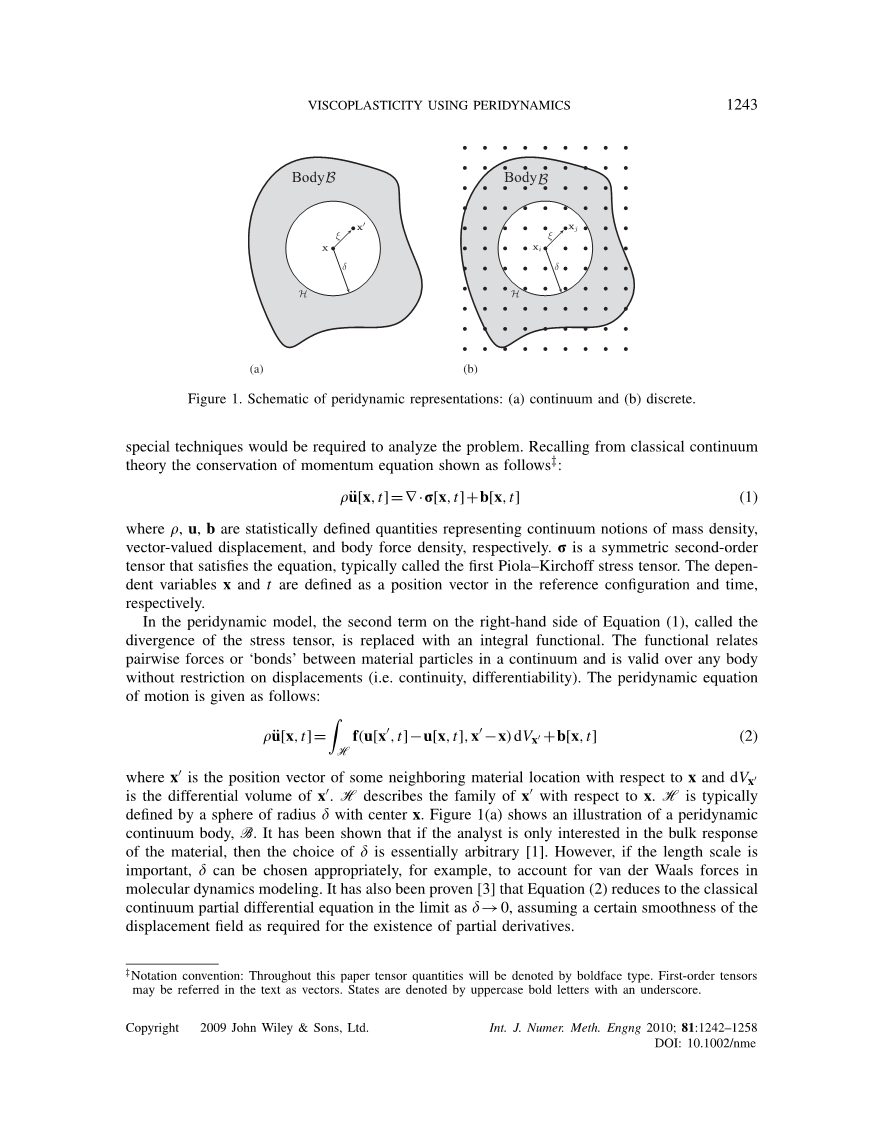
图1. 近场动力学方法示意图:(a)连续(b)独立
这些不连续的变形会导致经典公式无法求解空间导数,必须依靠特殊的处理才能够分析这类问题。回顾经典连续介质力学理论中的动量守恒方程:
(1)
其中、、分别定义为连续理论中的质量密度,位移向量,和体力密度。sigma;是满足方程的对称二阶张量,通常称为第一皮奥拉-基尔霍夫应力张量。因变量x和t分别表示为参考坐标系下的位置矢量和时间。
上式(1)的右手第二项,应力张量的散度,在近场动力学模型中被积分函数替代。这个积分函数与成对的力(也就是连续体重材料粒子之间的“成键”)有关,并且不受位移的限制(如连续性,可微性)。近场动力学运动方程由下式给出
(2)
其中是相对于和不同体积的边界材料的位置向量,描述的是关于的同型。通常由一个通过中心x轴的半径球体限定,图1(a)展示一个近场动力学方法的连续体。研究表明如果只关注材料的整体响应,那么delta;可以任意的选择[1] 但是如果考虑到长度规模的重要性,那么可以适当地选择delta;,例如考虑到在分子动力学建模时的范德华力。人们已经证明[3]当位移场具有一定平滑度并且delta;→0时,方程(2)退化为经典的连续偏微分方程。
等式(2)是近场动力学方法的原始公式,它有几个明显的缺点,主要是它是一种过度简化的假设,任何一对粒子只通过一个中心力函数来产生相互作用,并且与其他局域情况无关。因此对于各同性的线性材料总会是1/4的有效泊松比,类似于纳维的原始弹性理论。另一个缺点是这种特殊的模式要描述材料的本构行为意味着采用成对力函数的形式重新改写材料本构模型,要知道,经典的材料本构行为公式都是建立在应力张量基础上的。最后,尽管可以通过允许每个成键产生永久变形来描述材料的塑性,但这只能产生体积塑形而无法得到剪切塑形。通过金属的实验行为观察表明,只有剪切变形可涉及塑形响应。
为了解决这些问题,近场动力学方法被改写为更一般的方程[4]。所得的基于近场动力学方法态的运动方程的公式如下:
(3)
其中所有关于方程(2)的定义都成立,并且将T定义为近场动力学方法的力矢量状态。矢量状态的概念类似于二阶张量,它们都可以将矢量映射到矢量,但是载体的矢量状态不要求是线性或连续的。公式(3)中尖括号里表示的是态作用的矢量,对于材料的每个点T将应变矢量态映射到力矢量态,这种通用处理实际上允许相邻的键之间互相作用并避免了前面提到的所有缺点。采用这种方法可以采取经典的本构模型(即胡克定律)并将本构模型转换为力矢量态的描述[4]。当sigma;→0时,公式(3)将退化为公式(1),这里再次采用了位移场的平滑度假设[5]。
为了解决固体力学的一般问题,等式(3)是离散,它的积分被一个无限的总和替换。所以得式如下所示:
(4)
其中表示离散材料颗粒或节点,而表示边界的单个节点。k表示内的节点的总数,N代表近场动力学方法范围内的有利节点总数,表示节点的体积。图1(b)为离散近场动力学连续体体的一个例子。图1(b)表示出用材料分子结构网格化的例子,然而这仅说明了网格是可以完全随机的。此过程在Silling和Askari的工作中[6]有详细地描述,并得到了求解复杂力学问题的无网格方法。在桑迪亚国家实验室的程序EMU中,显式时间积分策略被用来求解这些动力学问题的方程。
Warren等,[7]表示最近在近场动力学的实验中线弹性和弹塑线性材料硬化模型转化到Emu时用弯曲收敛的方法求解。本文通过对应变硬化粘塑性模型到Emu扩展的研究,第一个实现将复杂的数值本构函数模型带入近场动力学研究框架愿望。并将实验数据和模拟数据进行比较。
近场动力学方法方程(公式(3))的离散版本(方程(4))的运动是无网格且符合拉格朗日函数,这是它和“粒子的方法”的区别,如光滑粒子流体动力学(SPH)和无网格伽辽金 等其他类似固体力学传统理论的偏微分方程的方法。这些方法都继承了传统理论里面以奇点(尤其需要裂缝)的特殊处理的特点。但是,由于上述的近场动力学方法的基本理论方程是适用于光滑的或不连续的变形,因此没必要对有奇点的材料特殊处理。无论是裂纹或是其它不连续性的演变都可以应用离散方程(方程(4))来计算。这样做的一个好处是,在描述裂纹演变的过程中就不需要附加补充方程来保持其数学的一致性。而所有从方程产生的运动功能都与本构力函数有关系。此外已经有报道表明了近场动力学方法符合SPH无拉伸不稳定[9]。
2.静场动力学
在数字上实现了传统意义的第一步(应力和应变的公式化)——本构力模型在近场动力学方法态框架的基础下形成一个局部的变形梯度,F为每个节点。从传统的连续介质力学来看,变形梯度是线性局部的且近似于所限定的真实变形。
(5)
其中I是关于X的梯度算子的恒等张量。F中存在关于的偏导数。而位移场是连续可微的。在其他形式的计算力学(例如有限方法元素)中,,我们不会对近场动力学方法公式[14] 限制以使F中不存在偏导数。变形矢量状态(公式(6))近似与F的定义,从而得到真正的变形。
(6)
是2个材料点之间的相对位置
(7)
是相对位移
(8)
是关于任意键变形的向量函数。我们现在定义的非局部形状张量用下面的积分:
(9)
其中是二元算子乘积,它是标量值是依赖于。在有效果时始终为0或1,其对应于键是否被破坏。在近场动力学方法中材料是否失效在于键是否被破坏,这是PD理论的主要优点之一,在这里将不再讨论。本文将对[2,6]中近场动力学方法建模失败进一步说明。作为影响因子,其中对同性的材料有更大影响力。是迄今为止研究发现了唯一不变的影响因子,发现它没有明显的负面影响(不稳定性等)。式(9)的一个正定张量的积分的结果是可逆的。在离散系统中,我们可以用一个节点的非边界形状的张量总和来表示非局部形状张量:
(10)
表示:
(11)
只要在的公式里有三个非共面矢量则方程(10)中的K是可逆的。已知形状张量,则物质点X的近似变形梯度F由下式给出。
(12)
同样地,它的离散形式为:
(13)
由此可以证明变形梯度是一个完全的恒定变形。对于一个近场范围内的物质点来说,即使它的位置是沿边界或接近不连续的,它也始终符合上式。我们假设一个恒定的变形矢量状态,,则得到如下:
随着变形梯度渐渐被应用掌握,其余的运动学遵循标准规定。为了保持包括
d在内的完整性,且找到未旋转速率变形张量。首先速度的梯度张量由下式给出 (14)
由于F被定义为材料(拉格朗日)的坐标,为F关于的时间导数,速度梯度可以分为对称的和反对称的。对称部分被称为变形张量的速率,表示如下:
(15)
如果将极分解定理应用到F我们有
(16)
其中R描述了一个刚性体旋转的正交张量。R是由泰勒和那根[15]公
式计算出的量纲, V和U分别为左侧和右侧伸长张量。现在我们可以将式(16)代入式(14)得到另一种方式的速度梯度。
(17)
在等式(17)中代表斜对称转动速率。中对称部分称为变形张量未旋转速率。等同于等式(15),下面的公式可以描述变形张量未旋转速率
(18)
3.材料框架理论的重点
材料框架理论(也被称为客观性)主要说的是:对于变化的材料框架的变化组成法必须是不变的。因此在一个不变的方程里只有目标数量可以被使用。因此我们选择运用本构关系来求解未旋转的柯西应力。与未旋转的柯西应力有关,我们可以用与R来表示下述的旋转张量。
(19)
由于数字技术涉及到速率方程的整合,很显然我们需求解出压力率。Johnson 和Bammann[16]进行了Green 和Naghdi [17]的工作,并说明:如果一个运动被认为是由一个叠加刚性体运动给定的,即
(20)
其中a表示为刚体平移t的矢量函数,M表示在t时的正交旋转张量。等式(20)表示施加到未旋转并旋转的柯西应力率张量,该结果如下:
(21)
(22)
从方程(21)和(22)可知,未旋转柯西应力速率是符合公式的,而在旋转的中柯西应力速率是不符合的。而本构模型中,所有的压力都是假定的,以保证
符合材料未旋转的验算。
4.应力状态在近场动力学方法中的转换
如果我们假设未旋转柯西应力张量是一个已知量,我们可以利用旋转张量去极分解变形结构
(23)
现在我们可以将旋转柯西应力转换成第一皮奥拉 - 基尔霍夫应力张量,的关系如下
(24)
第一皮奥拉-基尔霍夫应力张量可被转化成与所述力向量状态以下关系[4]:
(25)
力矢量状态可由公式(4)代替,并且该数值大小为下一个时间步长的位移。然后该过程将一直在时间步长内重复计算来得到期望数量,以获得最终的解决方案。这种方法符合拉格朗日无网格化,它在每个无高斯积分点和节点的空间信息(位移,速度,加速度,应力,应变)中插入每个时间步的节点值。
5.冯·米塞斯塑性
收集拉力试验数据用于确定本构模型在单轴的参数数据,我们需要一种理论根据这些信息来建立变形模型。这个理论是在许多教科书中被提到[18,19],通常称为冯米塞斯塑性理论。有实验观察到,将金属的剪切变形(独立静水压力)的结果作为第一近似值。如果这个压力独立性的假设是有效的,则它遵循于偏应力定则,这个定义仅依赖下面的等式:
(26)
其中是未旋转柯西应力张量,即。式(26)中的第二项表示静压力,从柯西应力中减去它的应力来作为剪切变形,它的结果是偏离实际的。如果我们假设应力是从一个单轴拉伸屈服试验开始测量的,那么将G定义为:
(27)
相应应力状态下的偏应力张量
(28)
偏应力张量的量纲被定义为
(29)
式中的代表了屈服面的应力空间。应力空间中的轴代表着主应力的三维空间。在冯·米塞斯塑性理论中屈服面总是与沿着中心轴的圆柱平行。、和是主要的应力。一个应力状态绝不可能在屈服面之外,但可以在屈服表面上,收率表面可以在尺寸上发生变化,而这取决于G。
根据流程规则一旦偏应力幅度值已超过了材料中的G,则被认为它表示着发生了塑性的变形。在流程规则的讨论中,总的偏应变率定义如下
(30)
我们将假定总的偏应变率是弹性部分和塑料部分两者相加,所示如下:
(31)
弹性部分的应变是可完全恢复的,而塑料部分的应变是永久性。偏应变率张量的弹性部分可以再根据虎克定律的应力和应变率表示如下:
(32)
剪切模量——为了定义偏应变率张量的塑性部分我们假设流动法则
(33)
其中是一个尚未确定的标量,Q是在偏应力的方向的单位张量,定义如下:
(34)
方程(33)称为一个相关流规则,因为塑性流动的方向与偏应力的方向相关。这是最常见的流规则之一,它代表的是具有可塑性与压力不变性的金属模型。
6.屈服面判定
对于每个时间步长和每个近场动力学的节点,我们都必须计算代表屈服面的标量值。如果我们假设应力值,G表示一个等效塑性应变,且有关于时间导数等效塑性应变率(分别为和),可写为如下的形式
(35)
关于时间t的G的定义,我们需要判断是使用还是的值。最直接的方法是使用G这一较为保守的G的方案
(36)
是一个时间步长的增量常数。可以用一个假设的时间步长常数使得符号易于处理,但一般是不作要求。研究表明虽然这是一个简单的定义方法,通过进行稳性计算[20]就可以得出结果,但在复杂的情况下它是不稳定。另一种方法是由相同的稳定性的材料决定,计算结果没有附加超出了的传统稳定的时间步长,这是有限差分方法,这里采用了这种方法,是一个保守的隐形式定义:
(37)
在这里Gt是隐含在里的一个复杂的计算。以下步骤描述了我们将在只涉及重新构建标量的情况下解决的问题。首先我们将定义等效塑性应变率lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[152820],资料为PDF文档或Word文档,PDF文档可免费转换为Word



