道路交通中的双目视觉定位算法研究及实现外文翻译资料
2022-10-27 15:39:33
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
摘要
摄像机标定是计算机视觉和摄影基础和关键的问题。基于二维平面靶传统的标定方法未能由于特征点在一些校准图像精确定位给予可靠和准确的结果。提出了一种基于随机采样一致性(RANSAC)算法的照相机参数的精确和鲁棒估计方法,以排除在本研究中的不可靠的图像。首先,圆形点和绝对二次曲线的图像之间的距离的定义和推荐的阈值是由计算机仿真给出。第二,RANSAC已经用于自动挑选出校准的图像的子集,并且进行线性代数近似来估计的固有参数和外部参数。最后,所有的相机参数,包括镜头失真参数由非线性搜索算法细化。本文数值模拟和实际实验证明了该方法的准确度和鲁棒性。实验结果表明,该方法是在提高校准精度比传统的方法更稳健,高效。
- 引言
摄像机标定,其应用包括三维重建,视觉检测,目标定位[1],摄像头定位[2],机器人导航等,是计算机视觉是必不可少的。蔡[3]给出了问题的全面调查。两种参数应在模型中被考虑。固有参数集,该模型的内部几何形状和所述图像传感器的光学特性,决定了光如何穿过透镜进入传感器的像面伸出。另外一个,所述外部参数,测量的相机在世界的位置和方向的坐标系,另外一个,所述外部参数,测量的相机在世界的位置和方向的坐标系,它提供度量信息相对于用户固定的坐标系代替国税发照相机坐标系。为准确的严格要求,包换,透镜畸变[4-6]的应用,应考虑在内。摄像机标定在过去的二十年中已经获得越来越多的关注。根据校准对象各种有效的算法已有报道,它们被分为两类:自校准和基于对象校准。
1.1 自校准
校准相机校准是通过围绕一个未知的静态场景中移动相机进行。在多图像只有几个对应点足以校准照相机[7-9]的本征参数。主要的想法是要找到满足成对极线约束摄像机参数和Kruppa 方程导出自校准。基于灭点其他自校准技术也被引入[10,11]。但是,也有自校准三个显著不限于:(1)在视图之间的充分对应,必须成立,这是不可能的,当现场是无特色。 (2)求解Kruppa方程是困难的,在实践中不可靠的。(3)镜头畸变并不在几乎所有现有的自校准论文认为,这样的校准精度是不够的摄影测量应用。
1.2 基于对象的校准
最初,三维校准物体[1,7]用于照相机校准-振器,其中,所述三维点及其2D投影用的投影矩阵相关联。透视投影制剂可以线性只从一个图像中获得。它需要昂贵的校准设备和复杂的设置。为了克服这个缺点,在二维模式的新技术基地已在后者文献[12,13]提出。最近,张[14]
建议使用1D模式的校准(分上线对齐)已调查并扩展其他几位作者[15-17]。使用1D模式,使校准的主要优点是在相同的校准多台摄像机的可能性,因为一维图案的点甚至可以同时由多个摄像机彼此分开。在现有的摄像机标定技术,张氏方法[12],它被用作Bouguet照相机校准的基础工具箱在Matlab[18]和Open CV [19],是通过观察灵活至少两次的平面靶,其主要思想是获得相机从2D之间的单应性参数对象平面和对应的图像平面。由于它们易于使用,校准使用平面图案算法已经得到了广泛的验收[20-22]。最近,该技术主要集中在以下三个方面:(1)羽毛检测和定位。君楚[23]提出了一种新的棋盘边角检测这是一种基于形态膨胀和圆形模板。这个算法提供了一个有效和自动机制棋盘角检测,并且可以在复杂场景中使用。
还由Stuart Bennett和琼Lasenby[24]提出了棋盘功能的快速和强大的检测。棋盘
提取减法和求和(CHESS)特征检测器被设计为只响应棋盘角落。 在除了棋盘格局刨床,圆和戒指上的图案有也被用来[13,25-27]。为了提高控制的精度点,一个迭代优化方法已出台
和评估[28]。(2)新的优化方法。富强卓[29]提出了相机参数的新颖优化方法,通过最大限度地减少实际和计算机之间的距离度量,物点在摄像机坐标系统,而不是差的所检测到的图像点与投影图像之间通过相机参数计算点。富强卓[30]开发基于龙门技术,其中使用RANSAC算法细化校准参数。(3),用于精确的最优设置校准。照度的效果,数控制点,兴趣和2D平面位置上的区域提高校准的精确度和可重复性都已研究[31,32]。
这是很容易让我们把丰富的图像(超过20幅图像)当张的方法[12]用于离线摄像机标定。然而,它是公知的,这是难以准确地可靠地提取出所有的存在想要在所有影像功能
噪音,闭塞,图像模糊,改变照明或观点。当图像的不同子集被选择为校准照相机,校准结果不收敛,因为不准确的功能检测。因此,为了获得可靠的和准确的校准参数,它是一个极其重要的任务我们检测和删除不可靠的图像。在本文中,提出新颖的校准方法来应对这个问题。我们提出的检测方法的工作方式以下三个步骤:首先,随机抽样一致(RANSAC)算法采用选择自动校准图像的子集。 第二,进行线性代数近似来估计本征参数和外部参数。最后,所有的相机参数,包括镜头畸变参数是由精制Levenberg-Marquardt算法。据我们所知,
有关于在张的方法,使用RANSAC除了小报告[30],其中RANSAC法来除去所述不可靠
后非线性搜索对应点。然而,由于摄像机参数耦合,非线性搜索执行不好,经常达到本地解决方案,周某的方法是有限的,主要取决于初始化。相比与现有的摄像机标定技术的优势我们方法是:(1)它要求对没有事先知知从那里要拍摄的图像位置和方向。(2)图像的子集,自动选择,因此所提出的方法可以通过普通市民甚至谁不是专家利用在计算机视觉。 (3)相机的参数只需要一次性的非线性搜索优化。本文结构如下:第2节描述了初步知识在本文中,包括张的2D校准方法和RANSAC的原则。所提出的细节校准算法在第3描述第4节规定的实验结果。计算机仿真和实时数据用于验证所提出的技术。最后,第5节总结
这项工作的角度看纸张。
- 初步措施
2.1相机型号
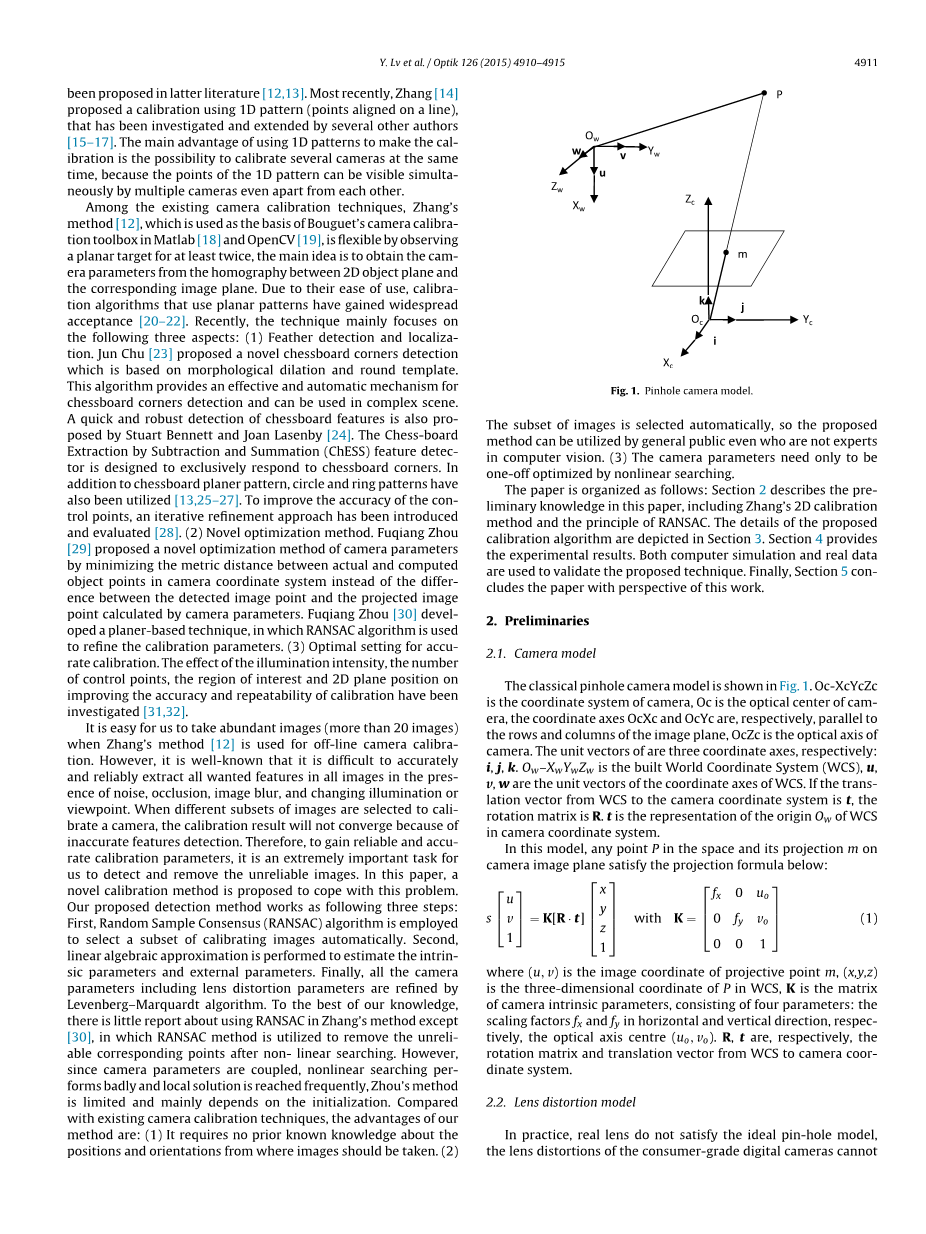
经典的针孔照相机模型示于图。 1,OC-XcYcZc是照相机的坐标系,OC是摄像机的光学中心,
坐标轴OcXc和OcYc分别是平行于行和图像平面的柱,OcZc是的光轴相机。有三个的单位矢量分别坐标轴:I,J,K。 OW-XwYwZw是内置世界坐标系(WCS),U,V,W为WCS的坐标轴的单位矢量。如果翻译坐标从WCS向量到相机系统为t,所述旋转矩阵为R. t是WCS的起源嗷的代表性在照相机坐标系统中。在这种模式下,在该空间中的任何点P及其凸起m上相机图像平面满足以下投影式:
其中,(U,V)是投影点m的图像坐标,(X,Y,Z)是在WCS中P的三维坐标,K为矩阵
的相机内参数,包括四个参数:换算因子fx和fy在水平和垂直方向上,分别
光轴中心(UO,VO)。 R,T是,分别旋转矩阵和平移向量从WCS到摄像机坐标
系统。
2.2 镜头失真模型
在实践中,实际透镜不满足理想针孔模型,的消费级的数码相机的透镜失真不能被忽略。因此,一个合适的失真模型应选择。由布朗提出的最常用的方法[33]是分解失真成径向,偏心,和棱镜元件。径向失真由透镜元件的缺陷的径向曲率引起的。偏心失真是由于非严格的同轴度[4,34]的透镜元件的光学中心的。薄棱镜畸变产生于镜头设计和制造的不完善以及相机组装。在一般情况下,由于没有更精细的模型提高精度显著[5,6]的径向失真就足够了高精度的测量。用于校正径向失真模型给出:
其中R2= X2N Y2N,(XN,YN)是理想的规格化图像坐标,(U,V)是校正后的图像点和(UD,VD)是具有径向失真相应的图像点中,k1是的系数径向变形。
2.3. RANSAC
RANSAC随机抽样一致性(RANSAC)最早由费什勒和博尔斯[35]公布。RANSAC算法常常在计算机视觉,例如使用的,同时解决的对应问题,并估计有关的一对立体摄像机[7,36]的基本矩阵。这是从一组观测数据,其中包含离群值估计数学模型的参数,ETERS的迭代方法。标准RANSAC算法过程如下:(1)将输入数据的一个小子集随机选择并拟合这些数据模型参数计算。(2)所有其它数据对拟合模型进行测试和支撑数据被选择作为用于该模型设置共识。(3)模型参数从共识组估计。这个过程与对应的共识集大小重复固定数量的迭代,每次生产无论是模式,是拒绝,因为太少点是一致集的一部分,或精致的模型在一起。在后一种情况下,我们保持精致的模型,如果是一致集比以前保存的模型大。对于每次迭代设置共识是从相关的特定应用的需求来决定。这个问题将在第3节可以从概率理论来确定迭代次数作进一步讨论。令p是该RANSAC算法从输入数据中的一些迭代中仅设置离群的概率。迭代的次数由以下形式[7,35]的表达式决定:
其中w是内围层的比例,n是最小子集从该模型参数估计的大小。常见的情况是,w是没有很好地事先知道。自适应算法被引入来确定迭代次数。该自适应是在文献中充分描述。 [7]。这种自适应方法工作得很好,在实践中覆盖样品的数量和终止算法的问题。此自适应算法由Peter Kovesi[37]实施,一些实施例还给出。
- 摄像机标定RANSAC
RANSAC据张的方法[12],给出的平面校准图案的图像,一个单对应性可以被估计,并且可以给出在固有参数的两个基本约束:
其中,h是在预先已知平面图形的点和相应的图像点之间的单应性的行。如果采取平面校准m的图像,m个方程如方程(4)产生的。至少两个图像是必要的,以获得一个唯一的解决方案。紧密型溶液可简单地通过奇异值分解(SVD)来估计。一旦K被公知的,当相应的单对应性是已知的针对每个图像外参数计算(见[12]详细信息)。这种封闭形式的解决方案是为了避免分歧与非线性查找本地解决方案至关重要。在实践中,很难精确地且可靠地提取出所有在噪声,闭塞,图像模糊,并改变照明或角度考虑,等的存在下希望在所有图像特征。这意味着,不可靠的图像将导致不准确的相机参数,如果他们都参与了校准过程。因此,它是祁门功夫,功夫-坦为我们排除不可靠的图像。 RANSAC进行集中的问题。如上所述,校准针孔照相机模型,需要用于随机抽样2最小的数据。随后,线性算法进行计算绝对二次曲线(IAC),用K-TK-1中记载的图像[7]。圆形点,通过单应定义的,正是在IAC,方程。(4)成立。因此,圆形点和IAC之间的距离是指相机内参数的准确性。距离被定义为如下形式:
其中B是IAC的矩阵,满足:B = K-TK-1。在(ⅰ= 1,2)是单应性和i的行了Bh(J)(J =1,2)表示的元件矢量了Bh。
当计算距离时,最后的问题是选择的距离阈吨。如果圆形点和IAC之间的距离是大于T,对应的图像被识别为异常值和将在下一步骤中除去。这是我们很难选择的距离阈值T。一个非常高的门槛可能异常值成,而一个非常低的门槛设置的共识错误分类可能会在某些情况下会引起不稳定,因为图像的测量坐标是不准确的(通常称为噪声)。在本文中,阈值是由计算机模拟推荐第4.1.1节。
综上所述,与RANSAC推荐的平面校准过程描述如下:
- 通过移动模型飞机以丰富的图像在不同的方位上模型飞机的(超过20个图像);
- 提取的特征点中的图像,并计算每个图像[7,18]的单应性矩阵
- 自适应RANSAC方法设置参数:S =2,W = 0,K =infin;,T = 1,i =1;
- 根据公式随机选择两个单应矩阵并估计IAC。
- 确定一组内围与评价IAC雅阁荷兰国际集团,以公式一致。 (5)和所述阈值t;
- 更新由公式中的采样计数值k。(3),如果一个较大的一致性被发现;
- 如果我gt; K,最大的共识,集收购,则转到步骤(8); elsei= i 1的,则转到步骤(4);(8)一旦获得了最大的共识,校准图像的所述子集被确定。然后相机参数由张的方法计算。
- 实验结果
在本文所讨论的算法是使用合成和真实数据进行分析。据认为,在数据呈现的噪声遵循具有均值0和标准偏差ı正态分布。对于每个数据类型所执行的实验在下面进行描述。
4.1计算机模拟
所述合成数据是通过假设摄像机具有以下参数生成:KX=662.64; KY=664.91; U0=306.89; V0=241.45。图像分辨率640times;480像素。镜头畸变参数为0,模型飞机是一种含有12times;12=144角点棋盘搜身燕鸥。图案的尺寸IS30毫米times;30毫米。平面的方向由一个三维向量r,它是旋转矩阵的罗德里格符号从世界坐标系到照相机坐标系统表示。它的位置是由一个三维平移向量t来确定。
4.1.1 确定推荐的阈值T
锡这个实验中,我们使用9平面与在表外部参数1.噪声被添加到i的范围为0.1〜1.2的像素的投影图像点。我们分别计算该单对应性和IAC之间的距离,。为每个噪声电平,500独立试验中进行,该平均结果的图。 2.从图2,该距离当噪声水平小于0.3像素线性变化。由于噪音水平持续增长,这是急剧增大,同时投影图像点的噪声低于0.4像素更大。这就是说,校准时将定位图像点的精度小于0.4像素被不正确地执行。在实际视觉测量系统,在图像定位图像点的误差小于0.2象素[38]。因此,当t =1。此阈值将在下面的实验中被使用时获得的距离阈值。
4.1.2 合成数据提出的方法测试
在这项工作中,进行了分析四种方法:(1)RANSAC直线法的本文章中提出,并呼吁LINEAR1; (2)由张提出的线性化方法[12];(3),该提炼LINEAR1通过称为NONLIN1的Levenberg-Marquardt算法的估计的方法;(4)细化LINEAR2通过所谓的NONLIN2 Levenberg-Marquardt算法估算的方法。两个单独的实验进行。一实验性测试相对于输入噪声电平的校准精度与其他测试相对于离群的
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[153280],资料为PDF文档或Word文档,PDF文档可免费转换为Word



