汽车跟踪的分割和聚类行为:驾驶模式的识别外文翻译资料
2022-11-08 20:48:41
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
汽车跟踪的分割和聚类行为:驾驶模式的识别
Bryan Higgs和Montasir Abbas,IEEE成员
摘要—在驾驶行为研究中驾驶行为可能受到不可行的许多因素的影响。本文的研究调查了将驾驶状态与驾驶员行为联系起来的各种驾驶行为的特征。所提出的方法被构造为使得已知状态可以链接到多个动作,从而解释未知驾驶状态因素的影响。开发了两步法,用于驾驶行为的分割和聚类。该算法基于八个状态变量变量来分段和聚类跟车行为:纵向加速度,横向加速度,横摆率,车辆速度,车道偏移,偏航角,范围和范围速率。这种方法的结果是定义驾驶员的驾驶模式的状态动作集群。本文中使用的样本包括20个不同的驾驶员,即十辆汽车和十辆卡车司机。结果显示,汽车驾驶员之间的行为模式不同,而卡车司机之间的行为模式则相近。结果还表明,汽车驾驶员表现出对于每个驾驶员唯一的行为,而卡车驾驶员表现出共同的驾驶模式。本文提供了识别的驾驶模式的特征和频率,以及每个模式的相应建模参数。
索引术语—聚类方法,数据挖掘,驾驶员行为,交通流理论。
一、引言
如本文所定义的,驾驶员的行为是通过驾驶员实施特定动作(例如,加速或转向)对他或她的现有驾驶状态(例如,车辆的速度或到前方车辆的距离)的响应。因此,驾驶员的行为可以被正式地定义为将交通状态映射到驾驶员行动的功能。通常,驾驶员行为研究收集包含状态和动作的数据,并尝试在它们之间开发更准确的映射。这些努力通常不包括人类行为的许多影响因素,如情感,人格,饥饿或渴望[1]。
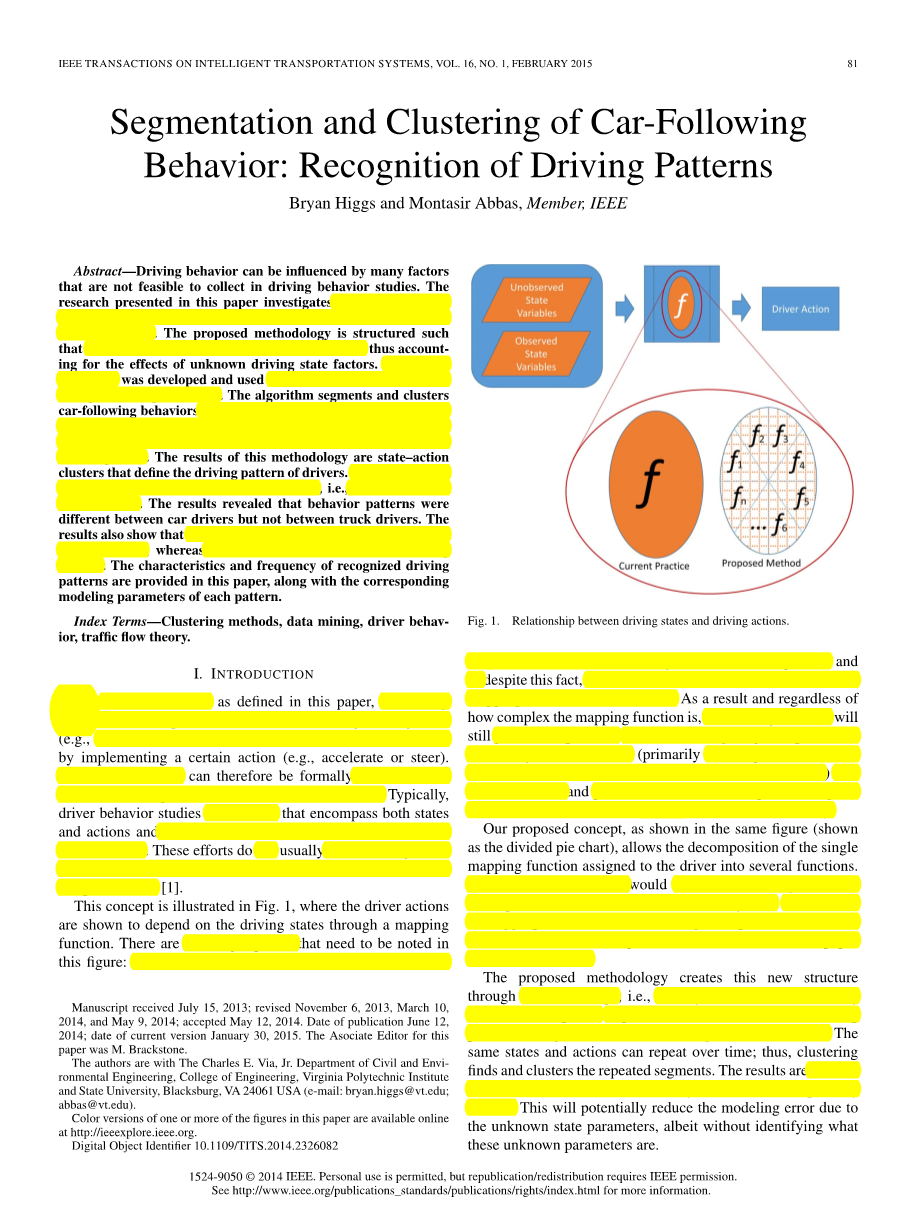
图一 驾驶状态和驾驶行为之间的关系
这个概念如图一中所示,其中驾驶员动作被表示为取决于通过映射函数的驾驶状态。 在该图中需要注意两个主要点:1)数据收集方法通常仅捕获完全定义驾驶状态的变量的子集,2)尽管这一事实,当前建模技术假定每位驾驶员的单个映射函数。作为结果并且不管映射函数是多么复杂,现有方法仍将产生大的误差,这是由于尝试汇集基本上不同的状态(主要在未测量的变量中不同,例如驾驶员的情绪,天气或位置)进入相同的状态并且产生将这些状态的平均映射到观察到的动作的功能,精度降低。
我们提出的概念,如同一张图所示(显示为分割饼图),允许将分配给驾驶员的单个映射函数分解为几个函数。这些函数中的每一个将覆盖状态空间的不同部分以最小化总体建模误差。映射函数的数量以及覆盖状态空间的相应识别和大小是我们在本文中定义为驾驶模式。
本文所提出的方法通过两个主要步骤创建这个新结构,即分割和聚类跟车数据。分段将每个跟车时段划分为类似的驾驶状态和动作的段。 相同的状态和动作可以随时间重复; 因此,聚类找到并聚集重复的段。 结果是包含相似的驾驶状态集合和相应动作的集群。这将潜在地减少由于未知状态参数造成的建模误差,虽然没有识别这些未知参数。
本研究工作有三个目标:1)找到一组规定性的状态集群,用于表征汽车和卡车司机的可能驾驶模式; 2)比较与多个驾驶员相关的不同模式,并检查不同驾驶员之间的相似性和差异性;3)通过考虑所提出的分割和聚类技术,可以改善车辆模型的性能。该工作的成功的关键是数据集包括各种各样的驾驶条件,使得大多数潜在驾驶条件,即已知和未知,被捕获在数据中。在以下部分,我们首先介绍过去研究的综合,总结了影响和指导这项工作的以前的工作。接下来,我们详细描述我们的方法,其中包括自然主义驾驶数据的概要,以前收集弗吉尼亚理工学院(VTTI),用于从数据集提取车辆时期的方法,分割方程,和聚类方法。最后,我们介绍我们的发现和我们的结论的影响。
二、过去的努力综合
本文中过去的努力的成果被分为三类,即跟车数据收集方法,建模跟车行为和数据聚类。 数据收集方法集中于各种数据收集方法的优点和缺点。跟车行为的建模关注于多年来已经开发和改进的众多汽车追随模型。最后,数据聚类聚焦于在已经应用于多个领域的聚类数据中使用的技术。
A.跟车数据收集方法
|
数据类型 |
描述 |
优势 |
劣势 |
|
自然数据 [2] |
仪表化车辆在正常的驾驶程序中被驾驶 |
|
驾驶员知道知道自己被观察 |
|
模拟数据 [3,4] |
驾驶员在模拟环境下驾驶 |
|
|
|
视频数据 [5,6] |
一架摄像机用于收集某一区域内的数据 |
驾驶员不知道自己被观察 |
|
|
模型类型 |
模型示例 |
相关工作 |
|
行动点或心理物理模型 |
wiedemann [7](用于VISSIM [8])和Fritzsche [9](用于PARMICS [10]) |
通过校准或比较评估阈值行动点[11,12] |
|
线性和非线性模型 |
(GHR)模型[13],智能驱动程序模型(IDM)[14],和速度差模型(VDIFF)[15] |
|
|
组合模型 |
混合车辆跟随模型 |
使用特定的校准GHAR参数来定义心理物理模型内的加速行为 |
跟车研究通常通过各种手段收集车辆轨迹数据,包括自然主义,模拟器和视频数据收集方法。表一突出了每种数据收集方法的优点和缺点,最终影响通过校准汽车追踪模型获得的建模结果的准确性。例如,自然和模拟器数据对于观察一个驾驶员的行为范围是有帮助的,但固定相机数据将有助于观察相同业务流中的多个驾驶员。
表一 车辆数据采集的类型 表二 车辆跟随模型汇总
B.跟车模型
车辆跟随模型被设计为处理各种刺激,例如车辆之间的车间距离,并产生响应或动作,例如驾驶员减速以保持一定的跟随距离。汽车跟随模型的主要类别是动作点或心理物理模型,线性模型,非线性模型和组合模型。行动点或心理物理模型将后面的时期划分为表示驾驶员期望动作的不同状态。例如,想要跟随前方车辆的驾驶员将加速和减速以试图维持期望的跟随距离。线性和非线性车辆跟随模型是非常相似的,因为它们主要处理引导车辆和跟随车辆之间的速度差异以及一些校准参数,以通常根据加速度产生主车辆的动作。组合模型是结合了心理物理学和非线性或线性模型的特征的汽车跟随模型。表二突出了每种数据收集方法的优点和缺点。
C.数据聚类
聚类数据的研究被分为两个主要的组,即单变量聚类和多变量聚类。每个组中有许多方面,但是对于建模车辆跟随行为的应用,时间序列聚类的方面是最重要的。大多数对聚类的研究发生在运输工程领域之外。 表三列出了Aggarwal和Reddy在本书中描述的各种时间序列聚类技术[20]。
|
方法 |
使用指标 |
相关工作 |
|
单变量聚类 |
|
时间序列数据的聚类方法[21] |
|
多元聚类 |
|
|
表三 时间序列聚类方法
三、方法
本文所使用的方法包括分割和聚类技术,用于捕获十辆汽车和十辆卡车司机的全系列状态动作集群。首先,我们简要概述在这种方法中使用的自然主义数据库,然后是用于从过高数据量中提取跟车时间的方法。接下来,我们提出分割方法后面的聚类方法。最后,我们给数据的汽车跟随模型的校准。
轿厢跟随时段被定义为主车辆在相同的行进方向上对前导车辆作出反应的时段。每个跟车期包括多个制度,参考心理物理车追随模型,由驾驶员的预期动作分开。例如,Wiedemann模型包括接近的状态,其中受试者驾驶员减速以下降到与前导车辆一致,并且在后续状态下受试驾驶员加速或减速以便保持安全的跟随距离。每个制度由两个主要部分组成,即状态和动作。行为是状态和驾驶员表达的动作(加速,减速和转向)之间的联系。本文中包含的分割过程将每个后续周期划分为多个分段,并且每个分段将被定义为一个制度。聚类过程将类似的段组合成单个集群,解释了可以重复的方案的事实。因此,集群被定义为某个行为的分组。分割和聚类过程在图二中示出了样本车辆跟随时段。
在该图中,表示出了八个变量中的三个以保持图示简单。中间图示出了其中已经形成相似数据的片段的分割步骤的结果。然后在聚类步骤中处理和聚类这些段以创建底部图。聚类步骤比分割步骤更紧缩; 因此,一些相邻段被放置在同一群集中。用于分割和聚类的算法是关于最大数目段和聚类的驾驶数据。这种分割和聚类技术被设计为不是在下一小节中解释的本文的数据集所特有的。
图二 算法设计的概念表示
A.自然驾驶数据
自然驾驶数据是指从驾驶员在自然环境中收集的数据。这通过为车辆配备专门的传感器和“车辆网络”记录设备来实现,然后允许参与者在他们认为合适的时候驱动车辆。该设备记录大量的变量(例如,速度,加速度和方向盘位置),并且对汽车跟踪特别感兴趣,位于车辆前方的雷达系统记录主体和前方车辆之间的位置和速度的差异。该设备还包括记录驾驶员从前面看到什么,驾驶员从两个侧视镜看到什么,驾驶员的脸,以及驾驶员在车辆内做什么的相机。本研究工作中使用的自然数据由VTTI收集[2]。表四显示了自然驾驶数据变量及其定义。这些数据是从多辆驾驶员使用的9辆卡车和100辆汽车收集的,并且以10Hz或每秒10个样本的速率记录。
|
变量 |
定义 |
|
雷达目标ID |
分配给每个前车的唯一识别号 |
|
纵向加速度(g) |
主车辆沿着道路的加速度 |
|
横向加速度(g) |
横跨道路的主体车辆的加速度 |
|
偏航角度(rad) |
车辆前进方向和道路中心之间的角度 |
|
偏航率(rad/s) |
偏航角的变化率 |
|
车速(km/h) |
本车的速度 |
|
通道偏移(in) |
车辆中心和行驶车道中心之间的距离 |
|
范围(ft) |
从本车辆的前方到前方车辆的后方的距离 |
|
范围速率(ft / s) |
主车辆和前方车辆之间的范围或速度的变化率 |
表四 车辆跟随变量的自然数据
B.车辆跟随周期的提取
根据具体情况自动提取随访时间,分为两类。第一组条件用作提取与跟车时段相关的数据的过滤器。第二组条件用于两个目的,即提取足够长以用于分析的车辆追随时间段并且过滤掉假阳性。第一组条件如下:有一个前车;前车在120米以内;所述前方车辆处于与所述本车辆相同的车道中;道路曲率小;并且车速大于20km / h。对速度的限制是为了将汽车追踪数据与交通堵塞数据分离,因为交通堵塞存在大量未在自然数据中收集的变量。道路曲率的限制是限制本车前方的道路在雷达收集数据的锥体之外的情况。第二组条件如下:当范围小于61 m时,跟随期间的长度必须大于30 s。测试多个时间长度以定义这些条件,但是与较低的时间长度例如25秒(80%)相比,30s显示出最高的正确率(98%)。
通过视频分析从事件样本验证了自动提取过程。 对于400个周期的随机样本,392个是有效的追踪期。 被认为不被分类为跟车时期的八个时期仍然表示驾
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138647],资料为PDF文档或Word文档,PDF文档可免费转换为Word



