定子磁通定向控制的级联双馈感应电机外文翻译资料
2022-11-11 15:02:32
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
定子磁通定向控制的级联双馈感应电机
摘要:双馈感应发电机具有许多工业应用,也用作风力发电机。将能量供应连接到转子所需的电刷是这些机器的主要缺点。因此,有可能通过无刷双馈感应发电机来代替该发电机。级联双馈感应发电机可以用作无刷双馈感应发电机研究的起点。本文介绍了基于发电机定子通量的矢量控制下的级联双馈感应发电机动态特性的研究。矢量控制分为两部分:电流控制环路和功率控制环路。矢量控制和功率流通过实验验证,结果表明使用级联双馈感应发电机作为变速发电机的可行性。
术语
变量 下标
u 电压 p 发电机
i 电流 c 控制机
磁链 s 定子
R 阻抗 r 转子
L 漏感 ep 发电机的电气速度
M 互感 epc 电源和控制设备之间的电气速度
角速度
P 极对数
电磁转矩
- 简介
绕组转子感应发电机,也称为双馈感应发电机(DFIG),在变速发电机应用中具有优势,因为其独立地提供对有功和无功功率的控制。 功率控制可以通过使用连接到转子电路的功率电子转换器来实现。 双馈感应发电机通过向转子绕组提供更低额定值的电子转换器来找到应用空间。 速度范围越小,电子转换器越便宜[1] [2] [3]。
然而,必须呈现在双馈感应发电机中的电刷仍然代表机械和电气故障的来源。 自20世纪初以来,已经进行了许多研究以便开发出可以克服这种缺点的机器。 这些研究导致无刷双馈感应电机或笼型无刷双馈电机的发展。 创造这种机器的第一次尝试可以追溯到西门子和Lydall [4]和Hunt [5]提出的使用绕线转子机器的机器。 但在1970年,Broadway和Burbridge为笼型无刷双馈电机嵌套环形转子提出了一种新的鼠笼式转子[6]。 由于笼型无刷双馈电机的特殊定子和转子结构,这些机器提高了学术兴趣,但很少有工业应用。
级联双馈感应发电机(CDFIG),包括机械和电气两个双馈感应发电机的连接,可以具有更高的商业吸引力,因为双馈感应发电机是标准制造。 第一个电机称为电机,直接连接到电网,而第二个电机称为控制机,由电力电子转换器提供。 此外,一旦轴机械耦合,旋转速度是相同的,消除了对电刷的需要(BCDFIG - 无刷级联双馈感应发电机)[7] [8]。 主要使用这种发电机的似乎是如具有变速操作的风力发电厂发电机[9] [10] [11]。
本文的目的是研究基于定向通量定向通量的矢量控制下的级联双馈感应发电机的动态特性。该控制方法可以分为两部分:电流控制回路和功率控制回路。
基于电流控制回路的实验结果,检验了控制机中的级联双馈感应发电机对电流阶跃变化的瞬态响应和交叉耦合干扰。 在功率控制装置中,检查有功和无功功率的去耦。
这项工作的主要贡献是构建一个简单和灵活的测试台来验证适用于级联双馈感应发电机的可视控制策略。
- 级联双馈感应电动机模型
级联双馈感应发电机的模型可以从背靠背连接的两个双馈感应电动机的模型导出,如图1所示。
图1 级联双馈感应电动机:两个双馈感应电机背靠背连接
忽略磁饱和,电机模型可以假定为线性的,并且考虑在一般参考系中表示的电dq0和在正相序中的转子连接[12] [13]由以下等式定义:
以正相序连接的转子使得各个扭矩分量沿相同方向操作,但是对于负相连接,单个扭矩沿相反方向工作。负序相位连接在工业应用中没有实际用途。
通用参考系中的磁通链可以表示为:
由和
两台机器生产的级联双馈感应电动机轴中的总机械扭矩由下式计算
与参考系不变的电磁转矩由[14]给出:
并且级联双馈感应电动机的机械方程可以写为:
和
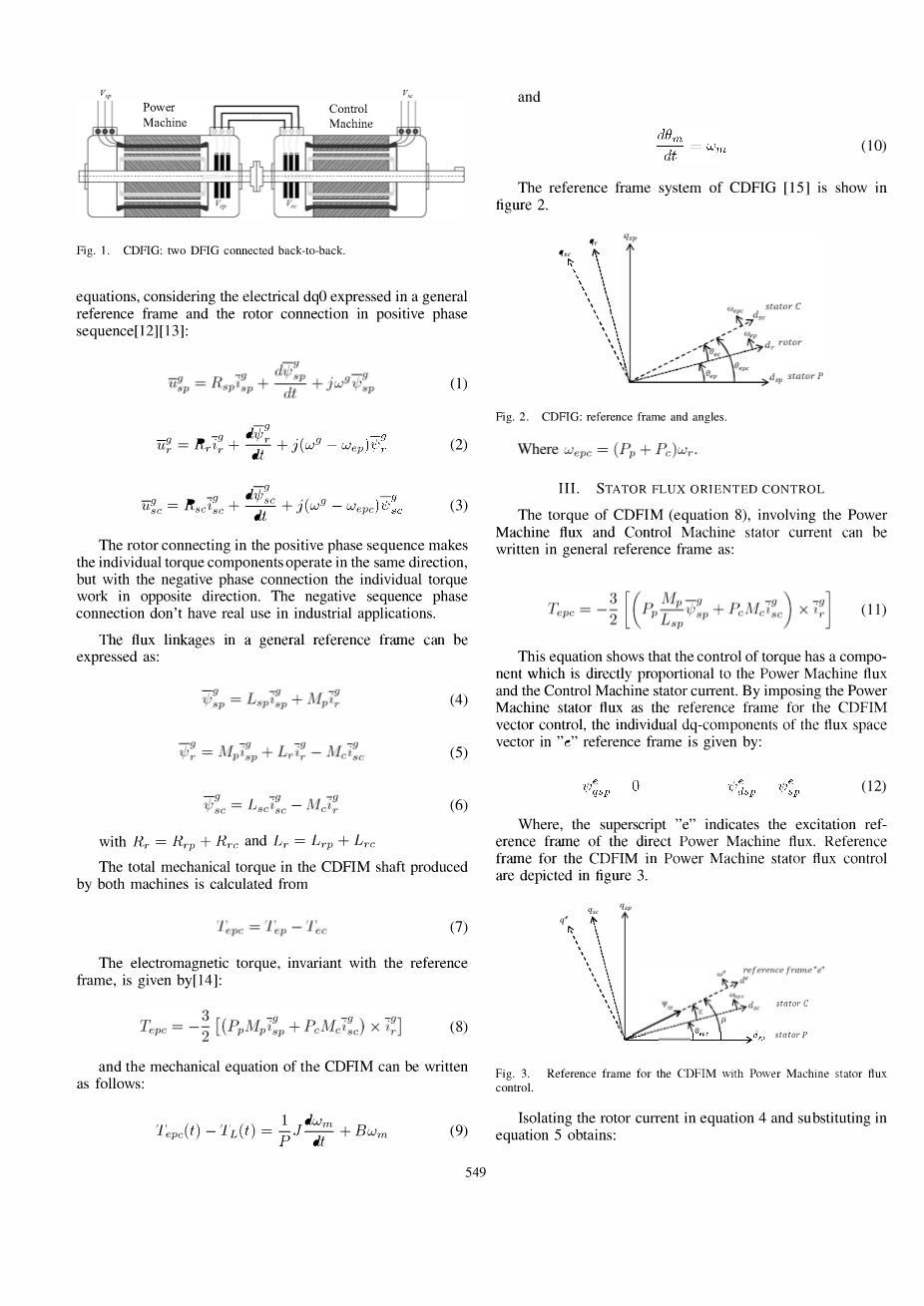
级联双馈感应发电机的参照系系统显示在图2中。
图2:级联双馈发电机:参照系和角度。
此时
3.定子磁场定向控制
包括功率机磁通和控制机器定子架的级联双馈感应电动机(等式8)的扭矩可以在通用参考框架中写为:
该等式示出了扭矩的控制具有与功率机器磁通和控制机器定子成分成正比的分量。 通过强加功率机定子磁通作为级联双馈感应电动机矢量控制的参考系,“e”参考系中的磁通空间矢量的各个dq分量由下式给出:
其中,上标“e”表示直接功率机器磁通的激励参考系。 功率机器定子磁链控制的级联双馈感应电动机参考框架如图3所示。
图3带功率的级联双馈感应电动机的参考系机器定子磁通控制。
在等式4中隔离转子电流并且在等式5中代入获得:
在等式5中隔离功率机器定子电流并且在等式中代替等式I获得用于定子通量定向矢量控制中的级联双馈感应电动机的模型给出dq分量[16]。
其中K由下式给出
A.电流控制回路
重写等式6的转子磁通,功率机磁通和控制机器的功能函数获得:
和
在矢量控制参考系中替换控制机电压(3)中的等式17,并且仅考虑dq分量中的稳态,给出:
这些方程表示交叉耦合的两个项,第二项构成控制电机电压中的平滑交叉耦合,第三项是滑移比例项。 只有第三项应包括通过增加稳态精度以确保解耦控制。 q轴的前馈项由下式给出:
图4中示出了CDFIG的电流控制回路。其中块“{}”计算定子通量的静止参考与动力机械的励磁参考之间的角度。
B.电源控制环路
动力机的有功功率和无功功率计算如下:
通过等式4和13,功率机和控制机电流之间的关系由下式给出:
这些方程表明在转子磁通中存在交叉耦合,但考虑到非常小的转子电阻,该耦合可以忽略。
在有功功率(22)和无功功率(23)的方程中代入方程式(24)和(25),功率机器的功率可以通过控制机器电流控制:
转子磁通再次出现表示矢量控制中的交叉耦合。 可以假定控制机电流直接操纵功率机电流。
如图5所示的CDFIM通量控制的功率控制方案。块功率计算利用等式(22)和(23)来计算有功和无功功率的测量。
图5 级联双馈感应发电机:电源控制回路。
图4 级联双馈感应发电机:电流控制环路与动力机定子磁场定向
- 实验方案
为了验证具有定子磁通方向的CDFIM的矢量控制的性能,在使用CDFIM的测试台中测试。 实验测试台如图6所示。从左到右:编码器,级联双馈感应电动机(动力机和控制机),扭矩传感器和感应电机(IM)。
图6 级联双馈感应电动机测试台
矢量控制和PWM(8千赫)是在DSP的TMS320F28335,德州仪器实施。 测量设备由四个电流传感器(LEM LA55P),五个电压传感器(LEM LV20-P),增量式光学编码器和扭矩传感器(HB T22)组成。 动力机直接连接到电网(l20V,60Hz),控制机由背对背转换器供电。 1M由带恒定V / f控制的PWM逆变器供电。
动力机和控制机由两个相同的绕线转子感应电机组成。 感应电机参数如表1所示。
表1 级联双馈感应电机:电动机控制机器参数
本节介绍了级联双馈感应电动机矢量控制的两个实验结果:电流控制回路和功率控制回路。
- 级联双馈感应电动机电流控制环路
在该第一组中,1M以等于100rad / s的参考速度开始。 控制电机电流的d分量从0.0A到2.0A的变化施加并返回到0.0A,而q分量保持在0.0的恒定值。图7示出了电流控制的结果 循环。 可以看出在q分量的光交叉耦合。
图7 级联双馈感应电动机:电流控制回路:控制机电流
图8和图9示出了功率和控制机的有功和无功功率。可以看出,当控制机电流的d分量变化时,仅改变功率机的无功功率。 这种行为表明,动力机的有功和无功功率可以由控制机的各个电流部件控制。
图8电流控制回路:功率机的有功和复位功率
图9 CDFIM-电流控制回路:控制机器活动和复位功率
功率机器定子磁通矢量的dq分量的错误定位对CDFIM的控制具有影响。 在该参考系中,有功功率与和与无功功率成正比成比例。尽管存在由错误定向引起的交叉耦合干扰,但由于所引入的效应是非常不显着的,所以该效应通常可以被忽略。
在另一个实验结果中,在图10和11中更好地观察到这种交叉耦合,可以看出当引入的变化时和无功功率的效果。
图10 CDFIM-电流控制回路:控制机电流[ = 0到3和 = 2]
图11 CDFIM-电流控制回路功率机的活动和功率[= 0到3和 = 2]
B.CDFIM电源控制环路
功率控制包括在方案组控制回路中添加功率控制回路(图5)的方案。 功率控制环路的输出为电流控制提供参考信号。 有功功率机的参考信号设置为-100 W至300 W,回到-100 W,而q分量保持恒定值100 VAr。 功率控制从图12可以看出,功率控制的性能表现出良好的动态性。
图12 功率控制回路:功率机的主动和复位功率
在图13中可以看出,转子磁通交叉耦合施加控制机器电流的d分量中的振荡。
图13 CDFIM-功率控制回路:控制机电流
在图14至18中,有功功率机器的功率为200W,无功功率为100V的VAr。 速度的参考信号设置为85.0 Rad / s至105rad / s并回到85rad / s。级联双馈感应发电机转子速度可以在图14中看出。图15示出了当转子速度改变时控制机械的动态。
图14 CDFIM:控制机器激活和重新分配功率
图15 CDFIM-功率控制回路:控制机电流
图16和17显示了级联双馈感应发电机的有功和无功功率。 可以看出,动力机械中的功率稍微变化,然而控制机器功率变化以补偿转子速度变化。
在功率控制回路中产生的控制机电流的参考信号和控制机电流在图18中示出。
图16 CDFIM功率控制回路:功率机的主动和复位功率
图18 CDFIM:控制机器激活和重新分配功率
该图示出了d分量中的交叉耦合,并且速度变化在q分量中起作用。 此行为表明控制机电流的q分量直接作用于转子速度。
- 结论
分析了CDFIM动态性能的调查。 此外,理论研究由实验结果证明。
功率机器定子磁通定向控制揭示了控制级联双馈感应发电机的一个好的选择。 电流和功率控制环路具有良好的动态响应。 存在于转子磁通中的交叉耦合强度取决于转子速度和转子电阻。 这些交叉耦合可以忽略。
级联双馈感应发电机是变速发电机应用的良好选择,因为它是一种结构相当简单的可靠机器,结合了双馈感应电机的优点,无需使用电刷和滑环。
致谢
这项工作得到CAPES,CNPq和FAPERJ的部分支持。
参考文献
[1] B. Gorti, G. Alexander, and R. Spee,“基于功率平衡的双馈感应电机
”能量转换,IEEE 第二卷, 第四期,第687 -692页,1996年12月.
[2] W. Leonhard,控制电气驱动器,第3版。Springer Verlag, 2001.
[3] I. Gowaid, A. Abde1-Kha1ik, A. Massoud, and S. Ahmed, “可穿越能力的并网无刷级联风力发电机在故障电网条件下的比较研究”,可持续能源,译于电气和电子工程师协会,第1002-1015页,2013年10月。
[4] S. B .. C. Ltd. and F. Lydall.“多相感应电机的改进”,英国专利号:16839,1902年7月。
[5] L. Hunt,“一
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137757],资料为PDF文档或Word文档,PDF文档可免费转换为Word



