用于交通监控系统的车辆检测和跟踪外文翻译资料
2022-11-11 15:04:54
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
用于交通监控系统的车辆检测和跟踪
Kantip Kiratiratanapruk and Supakorn Siddhichai
Information Research and Development Division National Electronics and Computer Technology Centre National Science and Technology Development Agency Thailand Science Park, Pathumthani, Thailand 12120 Kantip.Kiratiratanapruk@nectec.or.th and Supakorn.Siddhichai@nectec.or.th
摘要:
本文提出了一种基于目标检测与跟踪的实时视频交通监控应用,用于确定车速、车辆数量等交通参数。在检测步骤中,提出了一种基于边缘信息的背景建模方法,将运动前景对象从背景中分离出来。边缘信息一个优点是对户外环境中的光照变化更健壮,并且需要更少的计算资源。在跟踪步骤中,采用光流Lucas-Kanade(金字塔)对每个分割对象进行跟踪。在各种白天环境下,对六段视频序列进行了评价。
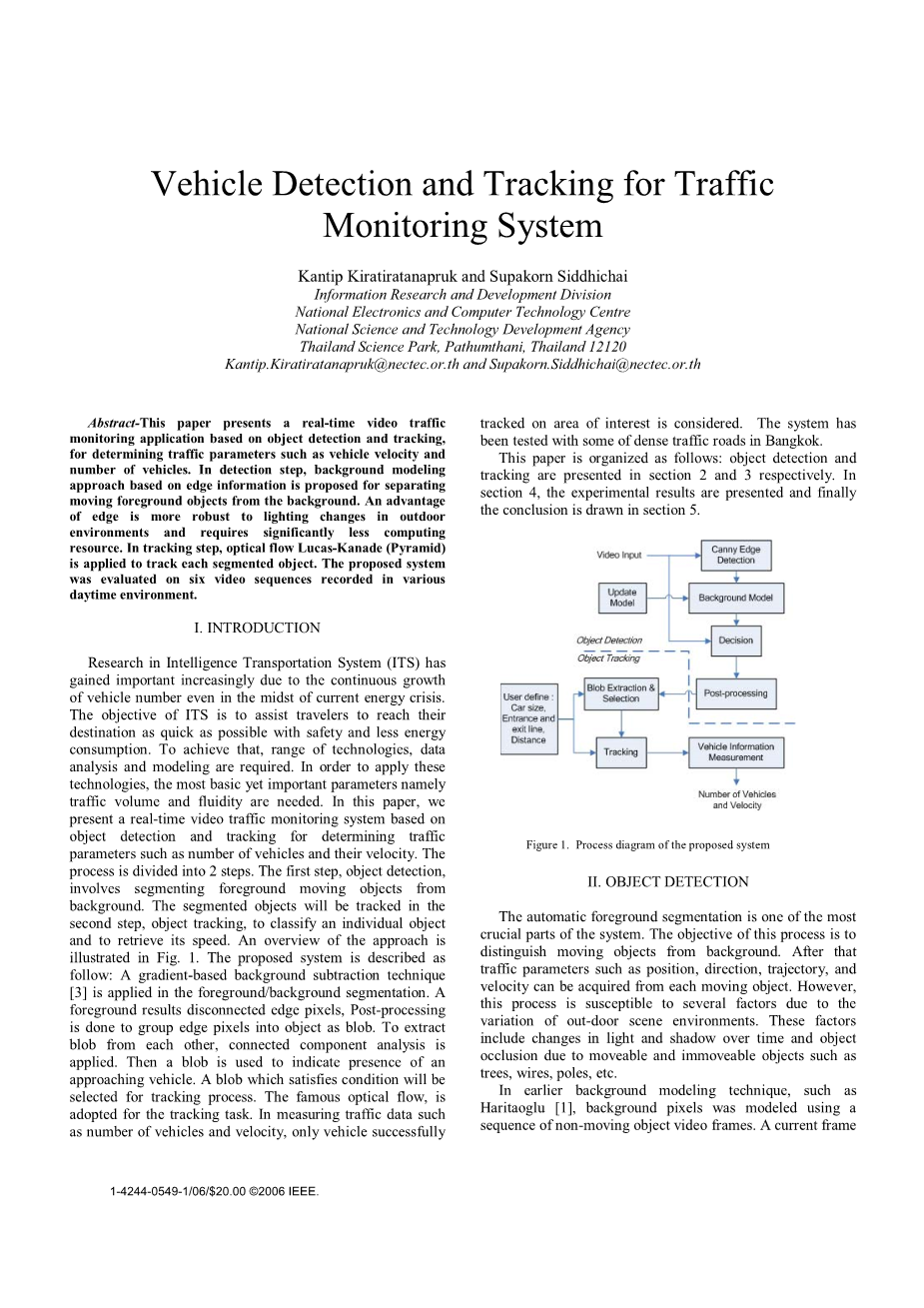
一、介绍在当前能源危机背景下,随着汽车数量不断增长,智能交通系统的研究也变得越来越重要。ITS的目标是帮助旅行者尽可能快同时安全又低耗能的到达他们的目的地。为此,需要一系列技术、数据分析和建模。为了应用这些技术,需要最基本但又最重要的参数,即交通量和流量。本文提出了一种基于目标检测和跟踪的实时视频交通监控系统,用于确定车辆数量、车速等交通参数。这个过程分为两个步骤。第一步,目标检测,涉及从背景中分割前景移动对象。在第二步中跟踪被分割的对象,跟踪对象,对单个对象进行分类并检索其速度。图1给出了该方法的概述。该系统采用基于梯度的背景差分技术[3]进行前景/背景分割。前景导致边缘像素断开,后处理将边缘像素聚集成目标,并作为一个斑点区域。采用连通分量分析的方法,实现相互提取。然后用一个斑点区域来表示正在接近的车辆的存在。选择一个满足条件的斑点进行跟踪处理。跟踪任务采用著名的光流。在测量车辆数量、速度等交通数据时,只有车辆能够成功进行跟踪。该系统已在曼谷一些交通密集的道路上进行了测试。
本文组织如下:第二节和第三节分别介绍了目标检测和跟踪。第四部分给出了实验结果,第五部分给出了结论。
图1 系统流程图
二、对象检测
前景自动分割是系统中最关键的部分之一。这个过程的目的是将运动物体从背景中区分出来。然后,可以从每个运动对象获取位置、方向、轨迹和速度等交通参数。然而,由于户外场景环境的变化,这一过程容易受到多种因素的影响。这些因素包括光和影随时间的变化以及由于树木、电线、杆子等可移动和不可移动的物体造成的物体遮挡。
在早期的背景建模技术中,如Haritaoglu[1],背景像素是使用一系列非运动目标视频帧来建模的。将当前帧与参考背景模型进行比较。一个像素的差值大于一个阈值,被认为是前景像素。该技术适用于光照变化频繁的室内环境。Stauffer[2]提出了一种混合高斯(MOG)的自适应背景建模技术。为了处理亮度变化,每个像素都由高斯混合建模。这种方法适用于室内和室外环境,其中背景光的变化是逐渐发生的。由于模型适应较慢,对光照条件的突然变化比较敏感。
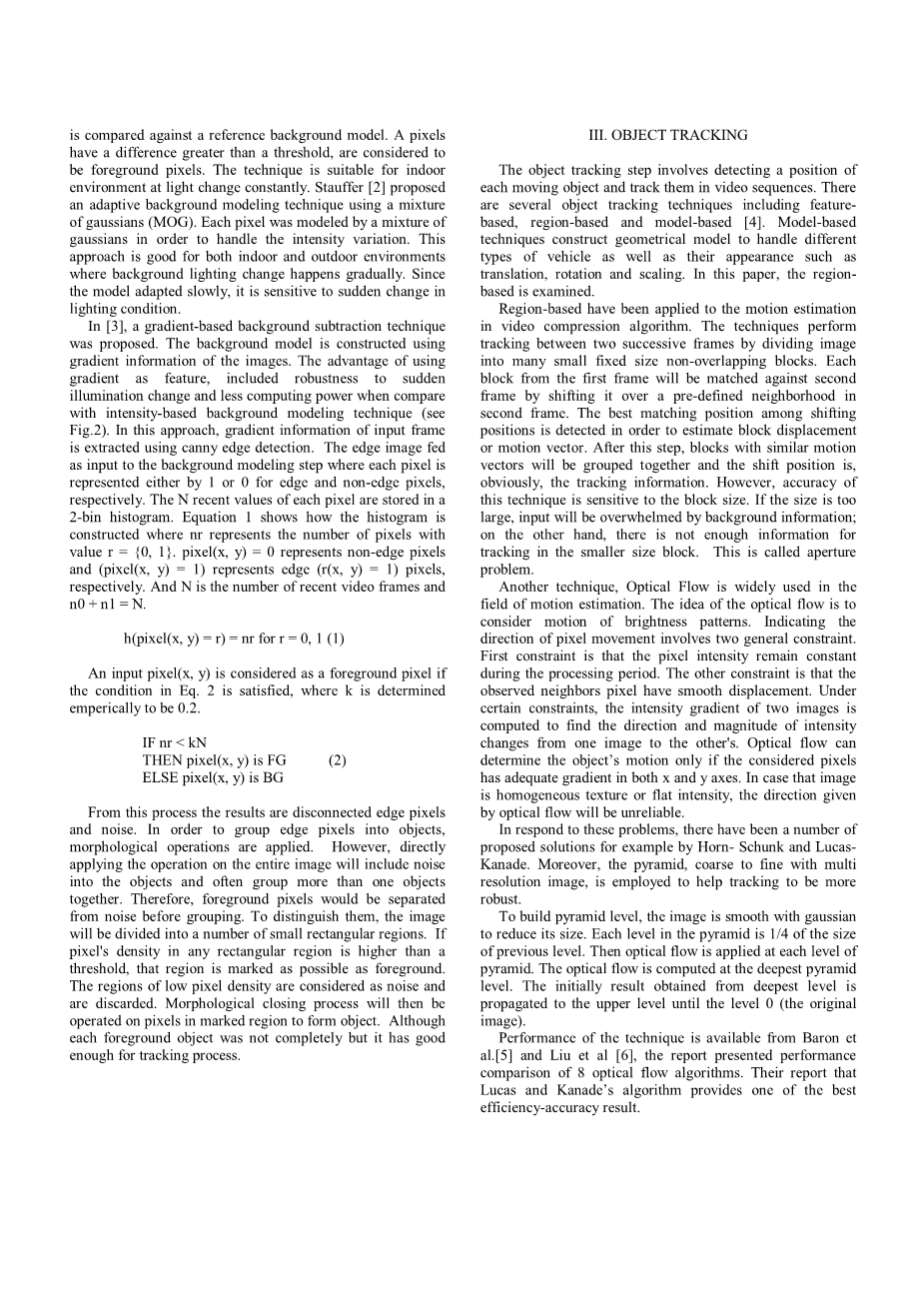
在[3]中,提出了一种基于梯度的背景减影技术。利用图像的梯度信息建立背景模型。利用梯度作为特征的优点是,与基于强度的背景建模技术相比,具有对光照突变的鲁棒性和较低的计算能力(见图2)。该方法利用canny边缘检测方法提取输入帧的梯度信息。边缘图像作为背景建模步骤的输入,其中每个像素分别用1或0表示边缘和非边缘像素。每个像素的N个最近值存储在一个2-bin直方图中。公式1展示了如何构造直方图,其中nr表示值为r ={0,1}的像素个数。像素表示非边缘像素,像素表示边缘()像素。N是最近的视频帧数。
(1)
如果满足式2中的条件,则将输入像素视为前景像素,其中k经温度确定为0.2。
如果nr lt; kN,则像素是FG(2),否则像素是BG。
图2.a) 图2. b)
图2。前景检测对比图3a),2.a)基于强度的技术,如MOG 2.b)基于建议的方法。与图2a相比,图2b)没有阴影。
从这个过程的结果是断开的边缘像素和噪声。为了将边缘像素分组到对象中,应用了形态学操作。然而,直接对整个图像应用该操作将会在对象中包含噪声,并且常常将多个对象组合在一起。因此,在分组之前,前景像素将与噪声分离。为了区分它们,图像将被分割成若干小矩形区域。如果像素在任何矩形区域的密度高于阈值,则该区域被标记为前景。将像素密度较低的区域视为噪声,剔除。然后对标记区域内的像素点进行形态学闭合处理,形成目标。虽然每个前台对象都不是完全的,但是它有足够好的跟踪过程。
三、对象跟踪
目标跟踪步骤包括检测每个运动目标的位置并在视频序列中跟踪它们。有几种对象跟踪技术,包括基于特征的、基于区域的和基于模型的[4]。基于模型的技术构建几何模型来处理不同类型的车辆及其外观,如平移、旋转和缩放。本文研究了基于区域的方法。
基于区域的运动估计在视频压缩算法中得到了应用。该技术通过将图像分割成许多固定大小的非重叠小块来实现连续两帧之间的跟踪。通过将第一帧中的每个块移动到第二帧中预定义的邻域上,将其与第二帧进行匹配。通过检测移动位置之间的最佳匹配位置来估计块体位移或运动矢量。在这一步之后,将具有相似运动矢量的块进行分组,移位位置显然是跟踪信息。然而,该技术的精度对块大小很敏感。如果尺寸过大,会被背景信息淹没;另一方面,在较小的块中没有足够的跟踪信息。这叫做孔径问题。
另一种技术,光流在运动估计领域得到了广泛的应用。光流的概念是考虑亮度模式的运动。指出像素运动的方向涉及两个一般约束。第一个约束是像素强度在处理期间保持不变。另一个约束条件是观测到的邻域像素具有平滑的位移。在一定的约束条件下,计算两幅图像的强度梯度,得到两幅图像之间强度变化的方向和幅度。只有当所考虑的像素在x轴和y轴上都有足够的梯度时,光流才能确定物体的运动。当图像纹理均匀或强度平坦时,光流给出的方向是不可靠的。
针对这些问题,已经提出了许多解决方案,例如Horn- Schunk和Lucas-Kanade。此外,利用多分辨率图像由粗到精的金字塔结构,提高了跟踪的鲁棒性。
为了构建金字塔级,图像采用高斯平滑来减小其尺寸。金字塔中的每一层都是前一层的1/4。然后在金字塔的每一层应用光流。光流计算在最深处的金字塔水平。从最深处得到的初始结果被传播到上层,直到第0级(原始图像)。
该技术的性能可以从Baron等人的[5]和Liu等人的[6]得到,报告了8种光流算法的性能比较。他们的报告指出Lucas和Kanade的算法提供了最佳的效率-准确性结果之一。
对于跟踪任务,采用了Intel OpenCV库提供的Lucas和Kanade基于金字塔的光流算法[7]。该算法有一个重要的优点,即该算法具有较强的鲁棒性,适用于像素位移较大的情况。
通过对前景像素进行背景减法处理后得到前景像素。对前景像素进行连通分量分析,将前景像素分组为斑点区域。然后用一个斑点来表示正在接近的车辆的存在。选择一个斑点作为一个矩形,该矩形同时满足高宽比和像素数约束。在跟踪过程中,每个矩形斑点的质心作为初始位置。在交通数据的测量中,我们定义了3个参数,包括起始/结束位置线和两条线之间的距离,这两条线用于检测车辆何时进入和离开场景(如图3所示)。测量车辆进入和离开标记位置的时间。单个车辆的速度是用距离除以时间来计算的。
四、实验结果
该技术是用C 编程语言在奔腾M 1.6 GHz 760 MB Ram上实现的。它已经在各种交通状况下进行了测试。实验采用6个视频序列(640x480像素,30帧/秒),分别记录在不同的白天环境、不同的地点、不同的视角下,从人行天桥上以约5米和12米的高度进行拍摄。每个视频序列的详细信息如下:
表1 每个视频序列的详细信息。
|
天气状况 |
角度/高度/交通状态 |
|
|
#1 6分钟 |
持续温和的光,但会有突然光反射 |
70/5/恒流 |
|
#2 19分钟 |
持续低强度 |
65/5/恒流 |
|
#3 9分钟 |
持续高强度 |
70/5/恒流,有时交通拥挤 |
|
#4 10分钟 |
持续高强度 |
45/12/常流 |
|
#5 2.5或#6 6.2分钟 |
阳光有时被云遮蔽,日落时分高强度 |
65/12/有时交通拥挤 |
通过前景检测和目标跟踪两部分对该方法的精度进行了评价。前台检测部分是检测到的车辆数量与车辆总数的比值。对于目标跟踪部分,只考虑第一部分检测到的车辆。统计从入口到出口成功跟踪的车辆数量。实验结果如表2所示。
表2 目标检测实验结果
|
车辆总数 |
在入口被检测的车辆 |
在出口被正确跟踪的车辆 |
帧率 |
|
|
#1 |
242 |
207 |
202 |
7.02 |
|
#2 |
620 |
513 |
510 |
9.03 |
|
#3 |
351 |
234 |
225 |
8.75 |
|
#4 |
104 |
91 |
83 |
8.89 |
|
#5 |
226 |
202 |
186 |
9.37 |
|
#6 |
221 |
195 |
168 |
9.51 |
|
总计 |
1764 |
1442 |
1374 |
总体精度由目标检测的精度和目标跟踪的精度决定。实验表明,目标检测的准确率81.75% ((1442/1764)times;100),目标跟踪的准确率为95.3% ((1374/1442)times;100)。因此,总体精度为77.9%((81.75 times;95.3) / 100)。
从实验中可以得出如下结论:从目标检测部分的结果可以看出,在视频中有阴影的地方,本方法的效果更好(见图3.a,3.e,3.f.)。我们可以成功地分离由阴影连接的多个对象。此外,当车辆通过摄像头时,该技术对突然反射的光线不太敏感。然而,大部分被忽略的对象是由于低对比度和深色的车辆,类似于背景色。它失败的原因是深色车辆的连接斑点没有足够的边缘像素。而相互靠近的交通工具使它们很难分离成单独的物体。
在跟踪部分,误差不大。在文件#5和#6中发现的丢失轨迹是由于灯杆的遮挡。文件#4中的错误是由于相机角度较低,导致较大的物体位移。
3.a) 3. b)
3.c) 3. d)
3.e) 3.f)
图3。视频序列3.a)-3.f)的示例输入表示#1中的场景。表示开始和结束的图像上的红色和绿色线条,显示车辆进入和离开车架的定位线。一个小的矩形块表示跟踪过程的结果。
五、结论
本文提出了一种基于目标检测和跟踪的视频交通监控应用。提出了一种基于梯度的背景减法用于前景/背景分割。跟踪任务采用著名的基于金字塔的Lucas和Kanade光流方法。实验结果表明,该系统具有较好的精度。该系统对阴影环境具有较强的鲁棒性。
参考文献<!--
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18876],资料为PDF文档或Word文档,PDF文档可免费转换为Word



