安装在腰部的电磁式人体动能采集发电器外文翻译资料
2022-11-25 15:00:49
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
安装在腰部的电磁式人体动能采集发电器
copy; Higher Education Press and Springer-Verlag Berlin Heidelberg 2014
摘要 人们提出一种安装在腰部的电磁式发电机采集人体动能来发电。根据电磁感应定律,该发电机可以在行走或跑步过程中将大腿的动能转化为电能。为了论证本方法的可行性,设计制作了安装在腰部的电磁式发电机样机并对该样机的运转状态进行了理论分析。此外,通过旋转电机和人体运动实验测试了系统的性能。当旋转电机以100r/min的转速驱动时,该样机的开路电压为2.5V 。进一步,当人以1.47m/s的速度行走时,可以产生的最大开路电压约1V,最大输出功率约为284mu;W。这种简便的可再生能源技术有望用于可穿戴或植入的传感器、致动器和移动电子设备并发展为一个普遍的发电系统。
关键字 人体动能采集、无处不在的能量、发电、可穿戴能源、可再生和可持续能源、移动电子设备
1 介绍
为植入式生物医学器件供电自研究起就是一项挑战。目前,大多数这种设备都是由电池或者充电电池驱动,虽然这些电池能有效地解决一些实际问题,但仍有许多情况比如更换或再给电池充电是极其麻烦的。为了延长植入式设备的寿命,有必要为其配备一个自主可持续的能源。在这方面,可再生环境友好型的人体动能对许多移动电子装置展现出极大的吸引力。事实上,这种功率足以驱动可植入式系统中的可穿戴传感器[1]。
一般来说,将人体动能转化为电能的主要途径包括压电效应或电磁感应。前者是通过压电材料产生的内部电荷,由施加的机械力产生的,一个典型的压电发电机有一个悬臂,由一个或多个压电片组成[2-6],在过去的几十年中, 人们研究了许多以这种方式为植入物提供动力的采集器[7-10]。此外,电磁发电机由于其高效也经常被用于能量可植入性医疗设备。根据法拉第电磁感应定律,典型的磁场发生器由一个或多个磁体和线圈组成。
Saha等人[11] 报道了一种电磁发电机,它可以收获人体能量用于驱动车身磨损传感器或其他电子装置,该发电机通过弹簧和磁铁在人类行走或慢跑时可以产生0.3–2.46 mW的电功率。 此外, Sardini等人[12]提出了一种高效的电磁发电机,用于将低频机械能转换成电能,试验结果表明, 发电机在大约100Hz的频率下可产生约290mu;W的功率,采集效率为0.5%,频率为40 Hz左右时,可产生约153mu;W的功率,效率为3.3%。基于对步行时的功率输出的分析, Donelan和他的同事[13-16]建立并测试了一个安装在膝盖的采集器( 1.6公斤), ,在行走时它可以通过两套这样的装置产生大约5W的电力。此外,一种自动传感器用于人体膝关节植入相关的测量[17],该传感器是由外部应用磁场诱导的植入物内线圈驱动的,通过这样的电源系统,传感器可以无线地将数据直接从植入物的内部传输到外部读出单元。Morais等人[18]描述了一种从人体步伐中获取能量用于智能髋关节假肢的电磁动力发电机,结果表明,该永磁振动发电机在正常行走过程中可以获得1912.5mu;J的可用能量。Bian等人[19]提出了一种无线电源接收机的磁电换能器,在磁电能量转换方面很有前景。该传感器在0.3 Oe均方根交流磁场下输出的输出功率密度为0.956mW/cm3。此外,还研究了适用于所有植入装置的经皮能量传输系统。1992年,在E类拓扑的基础上人们提出了一种具有闭环控制器的多频率变送线圈驱动器,并将数据传输到植入式电子器件上[20],测试结果表明,这样在射频上可以轻松有效地获得几安培电流。两年后,Joung等人[21]设计并建立了一个能量传输系统,用经皮变压器来驱动人工心脏,据报道这种变换器具有如高电压增益、最小环流和高效率的固有优点。Hmida等人[22]描述了一种感应系统,它可以通过外部传输线圈和植入的接收线圈无线地向所述植入装置提供电力,测试结果表明,E类功率放大器可获得功率约136mW,同时将命令数据发送到植入式电子器件的比特速率为1 Mb/s。Wang等人[23]提出了一种采用自适应控制技术的电力传输系统,可以减少线圈位移或传输功率负载变化引起的波动。基于E类功率放大器,可将最大功率为 250 mW的功率传输到植入的电子器件上。Riistama等人[24]提出了一种用于测量心电( ECG)无线数据和功率传输的有源可植入装置。Watada等人[25]研发了一种核心类型的经皮能量传输系统(TETS),该系统能高效率地为非接触经皮方式的植入装置供电。
本文提出了一种基于人体步行运动能量采集的安装在腰部的电磁式发电机,并对该发电机的样机进行了详细设计和分析。同时通过旋转电机和人体运动试验验证了电磁旋转电机( EHG)的性能,证明了其可行性,在此基础上,讨论了改进方案,并提出了各种可能的应用建议。
2 发电机样机
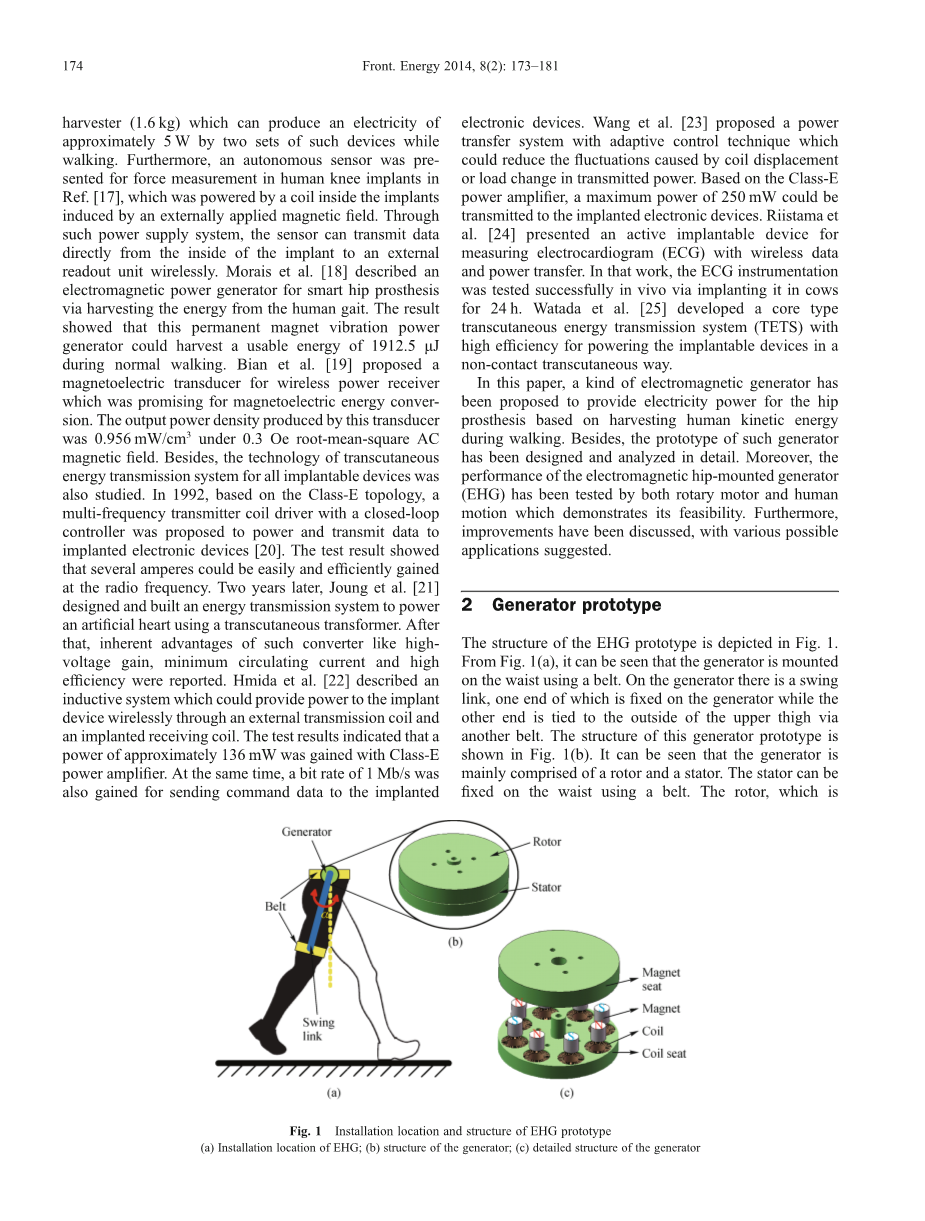
EHG原型的结构在图1中示出。从图1(a),可以看到发电机是通过皮带安装在腰部,在发电机上有一个摆动连杆,其中一端固定在发电机上,另一端通过另一根皮带系在大腿外侧。该发电机样机的结构如图所示1( b),可以看出发电机主要由转子和定子组成。定子可以用皮带固定在腰部,转子与定子同轴,固定在摆杆的一端。详细结构如图所示1(c),转子可以绕定子绕轴旋转。详细地说,转子装有一个磁铁座和八个磁铁,而定子有一个线圈座和八个线圈,这8个磁体和8个线圈分别固定在磁体座和线圈座中。
图1 EHG原型的安装位置与结构
( a ) EHG的安装位置;( b )发电机的结构;( c)发电机详细结构
图2展示了这个生成器原型的剖视图,从图2(b)可以看到磁体和线圈分别在磁体座和线圈座沿圆周方向镶嵌,且磁铁座的半径与线圈座相同,磁体的直径被选择与线圈的筒子也相同。如图2(a)所示为转子与定子之间的相对运动,当磁铁座旋转时,镶嵌在磁铁座上的八个磁铁开始与磁铁座同步旋转。这些磁体的旋转在线圈座周围产生一个不同的磁场磁场,因此感应电压将产生在线圈座固定的线圈中。值得注意的是,每两个相邻磁体必须在一侧设置相对的磁极,故当磁铁座旋转时,磁场方向在周期中改变四次。
图2 发电机样机的剖视图
(a)转子与定子之间的运动;(b)转子与定子之间的安装关系
在行走过程中,大腿像一个简单的钟摆来回摆动,如图所示3,从图3可以看到,在一个散步周期后,大腿在髋关节周围摆动一周。假设一个摆动的连杆固定在大腿上,它也会和大腿一起摆动一个周期,这个最大摆动角被定义为alpha;。
图3 发电机转速与行走频率的关系
EHG的工作原理如图4所示,从图4 (a)可以看到,一开始时摆动连杆保持垂直,使磁体和线圈的两极对齐,此时线圈具有最大磁通。然后随着大腿开始摆动,摆动连杆在大腿后面绕着髋关节摆动,当大腿摆动到最大限度时,大腿与垂直方向的夹角为alpha;,在大腿的驱动下,摆动连杆开始从初始位置旋转到这个过程的四分之一周期。摆动连杆的运动使发电机转子以顺时针方向旋转。此时,每个磁体都旋转到两个相邻的线圈之间,如图所示4(b),线圈的磁通量最小。行走后,完成第二步,大腿向髋关节周围的相反极限摆动,在大腿和垂直方向之间也有一个夹角alpha;。大腿旋转后,摆动连杆从四分之一的周期摆动到沿着左侧的周期的一半,摆动连杆的这一运动使转子以逆时针方向旋转2alpha;的角度,如图所示4(c)。在半周期时,每个磁体都旋转到中间的两个相邻线圈之间,他们产生一个线圈的最低磁通。行走周期完成后,大腿回到垂直位置,在此过程中,摆动连杆会从右极限到垂直位置,摆动一个alpha;角度,如图4(d)所示,摆动连杆的运动使转子从半周期旋转定子的中心轴向末端旋转。当每块磁铁和线圈的中心线回到开始位置时,发电机运转一个周期,转子绕定子旋转一周,而人则前进两步。
图4 EHG原型的工作原理
(a)开始时的摇摆乐;(b)四分之一周期;(c)半衰期的一半;(d)最后
根据法拉第电磁感应定律,用楞次定律表示发电机的感应电压为
E =N(Delta;phi;/Delta;t) (1)
其中E是接收器中线圈的感应电压; phi;为通过线圈的磁通量;N为线圈匝数;Delta;phi;=Delta;t为磁通量变化率。假设磁场对线圈的表面是正常的,发电机样机感应电压的最大值可以写成
Emax=Ntimes; Btimes; Stimes; Ctimes;omega;elec (2)
其中B是磁场的磁感应;S是每个线圈的面积;C为线圈的数目;omega;elec ,为感应电动势的角速度,与磁极对数的机械角速度有关,如
omega;elec =omega;mechtimes; p (3)
其中,omega;mech是发电机的角速度,p是磁极对数的数目。发电机产生的总峰值电压可改为
Emax=Ntimes; Btimes; Stimes; Ctimes;omega;mech times;p (4)
对于EHG发电机的角速度omega;mech取决于摆杆的最大角度和摆动周期。方程(4)可以变换为
omega;mech= 4(pi;alpha;/180TG) (5)
其中TG是摆动链路的摆动周期;alpha;是摆动连杆的最大摆动角也是行走时大腿的最大摆动角度。此外,根据发电机的旋转频率与图4所示的行走频率之间的关系。TG可被重写为
TG=2Twalk (6)
其中, Twalk 是采取一步所需的时间,这取决于行走速度V和步长c的长度,所以(6)可表示为
TG=2Twalk =2l/V (7)
将方程(7)代入方程( 5),发电机的角速度omega;mech可改为
omega;mech=pi;alpha;V/90l (8)
合并方程(4)和(8)可知EHG的最大输出电压可以定义为
Emax=Ntimes; Btimes; Stimes; Ctimes;(pi;alpha;V/90l)times;p (9)
从方程( 9)可以注意到输出电压的最大值取决于线圈匝数、磁场的磁感应强度、线圈的面积和数量、摆动连杆的最大摆动角、行走速度、步进的长度和磁极数。当磁体和线圈固定时,EHG的性能取决于步态和行走速度。然而,对于一个人来说,步行速度是影响EHG性能的唯一因素。因此,在以下的实验中,将提出步行速度对EHG的影响。
3 演示实验
为了论证EHG的可行性,提出了原型系统。实验装置如图5所示,由发电机、两个皮带、一个摆杆和一个整流器组成。这两个皮带用来固定在人体上的发电机,其中一个皮带被用来将发电机固定在腰部,而另一个皮带将摆动连杆的一端系在大腿上,如图所示5(a)。发电机的详细结构如图所示5(b),其中显示发电机主要由转子和定子组成。
图5 实验装置
( a ) EHG的安装;( b)发电机结构
3.1 转子
转子包含一个磁性阀座和八块磁铁,看起来像一个蛋糕,是由的直径为80mm,高度为12mm的尼龙构成,距转子中心30mm
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[26318],资料为PDF文档或Word文档,PDF文档可免费转换为Word



