一种多视场激光雷达测得的数据信息量外文翻译资料
2022-11-29 15:48:34

英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
一种多视场激光雷达测得的数据信息量
Igor Veselovskii, Michail Korenskii, Vadim Griaznov, David N. Whiteman,Matthew McGill, Gilles Roy, and Luc Bissonnette
摘要: 多视场激光雷达(MFOVs)对于云粒子尺寸信息的测量是有前景的工具.我们使用特征值分析方法进行多视场激光雷达信息内容的研究.我们开发出了使用主要特征研究MFOV激光雷达的方法,并提供了一种的测量颗粒估计精度的不确定度和散射几何形状的关系,如云底高度和激光雷达探测深度。二阶散射计算用于扩展粒子尺寸范围和扩展激光雷达视场。得到的结果能让我们详述这些激光雷达云研究可能的应用领域。极化和交叉极化散射分量的结果比较表明,当双散射是高度显性是优选的,交叉极化信号能够提供一个更稳定的反演。我们可以在系统和他们的角分布视场中分析允许的最佳数目。所以,这项研究可以成为实际设计MFOV多视场激光雷达中一个有用的工具。
1简介
云是影响全球气候的主要因素之一。这种影响取决于云的高度和分布和它辐射特性,而这又是通过云微物理参数确定的。因此,开发云参数远程监控新类型的仪器仪表, 如颗粒平均半径和浓度的垂直廓线是现代气候研究中的优先级任务。因为散射辐射的角分布包含粒度分布的信息,所以远程监测这些参数的方法之一是检查的多散射的激光辐射。在不同的方法中,利用这个原理[1],特别的工具是多视场激光雷达(MFOV)。在过去的十年中由Valcartier研究组[2-5]取得的进展使得我们能够考虑MFOV激光雷达是作为云研究的有力工具。然而,关于这一技术的应用还有一些重要的问题有待澄清。在回答之前,我们在构建的MFOV激光雷达过程中需要解决的问题包括:
- 应该使用多少个视场,每个额外的视场会使系统更昂贵和复杂吗?
- 视场在什么区间内使用和如何将视场分布在这个区间里?
- 可以反演到什么范围的粒径,以及这个范围怎么取决于云的高度、激光雷
达探测深度、测量的不确定性?
原则上,因为粒子和激光雷达参数的不同组合,这些问题可以用来回答广泛的数值模拟。然而,这样的方法是非常耗时的,为了阐明其对测量精度的依赖性在不同参数之间所获得的信息不能建立相关关系。
解决问题另一方法可以参考最近发表的有关多波长激光雷达测量的气溶胶粒子参数的反演方法[6]。
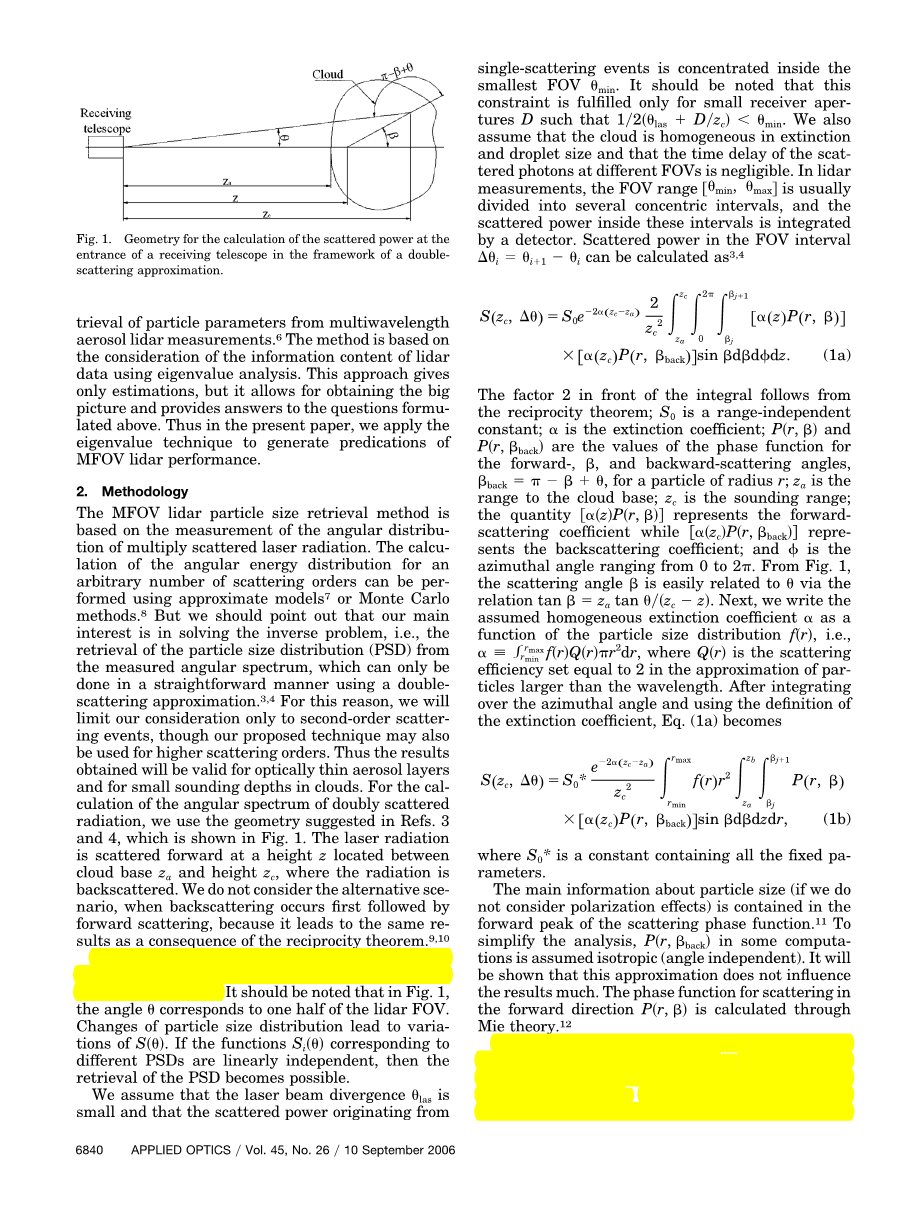
图1 双散射近似框架下接收望远镜入口处的散射功率计算的几何结构
该方法是基于利用特征值分析考虑激光雷达数据的信息内容。这种方法仅给出估计值,但它允许获得大的图片并提供上述问题的答案。因此在本文中,我们应用特征值方法产生MFOV激光雷达性能的预测。
2研究方法
多视场激光雷达粒径尺度反演方法是基于对散射激光辐射的角度分布的测量。可以使用近似模型[7]或蒙特卡罗方法[8]计算任意数量的散射阶角能量分布。但我们要指出的是,本文主要研究是解决逆问题,即从测量角频谱得到的粒径分布的反演,使用双散射近似只能用一个简单的方式[3,4]。由于这个原因,尽管本文所提出的技术也可以用于更高的散射阶,我们将限制只考虑二阶散射现象。由此获得的结果将是光学薄雾气层和在云中的小的探测深度有效性。对于双散射辐射角谱的计算,我们使用如图1所示参考文献[3,4]中几何提示。激光辐射在高度Z散射是向前的,在到是后向散射。当后向散射发生先后向散射时,我们不考虑替代方案,因为基于互易定理它会导致产生相同的结果[9,10]。
多视场激光雷达技术的本质是作为将分散的功率作为接收机FOV的散射函数来测量。应指出的是,在图1中,角对应的是一半的激光雷达视场,粒度分布的变化导致的变化。如果函数与PSDs相一致是线性无关的,对PSD的反演则成为可能。
我们假定激光光束发散角小,散射功率源来自单次散射且集中在最小的视场上。应该指出的是这个约束是只有小接收器孔D满足条件。我们还认为,云在消光和液滴大小是同性的,在不同视场的散射光子的时间延迟是可以忽略的。激光雷达测量视场范围通常分为几个同心的间隔,内部散射功率这些间隔是由探测器集成。视场间隔散射功率可以计算为
|
(1a) |
积分前面的因子2跟从互易定理,其中是独立的常数,是消光系数,,是正向相位函数的值和后向散射角,,粒子半径为r, Za是范围到云基地;,Zc是探测范围;数量代表前向散射系数,而代表后向散射系数; empty;是个方位角范围从0到2°。 从图1中可以看出,散射角beta;通过关系 很容易涉及到theta;。我们写了假定均匀消光系数作为一个粒度分布函数f(r),即其中 是散射效率在粒子近似中等于2大于波长。整合后在方位角上使用定义消光系数,式(1a)变成
|
(1b) |
其中是一个包含所有固定参数的常量。
粒子尺寸(如果不考虑偏振效应)的主要信息包含在散射相位函数的正峰中[11],简化分析, 在一些计算中假定为各向同性(与角度无关)。它会表明这种近似不会影响结果很多。用于散射的相位函数前进方向,通过计算三重理论.
图2.散射辐射功率的角度分布望远镜FOV
计算执行对数正态分布粒度分布的模态半径为r0=5,10,和50公尺。 云基地在Za= 500米; 探测深度在= 50公尺。 虚线曲线显示的结果的高斯近似。
对于信息内容的分析,更多代表特征是=d,其中描述一个内部测量的分散功率基本角度, 并允许我们确定其中FOV间隔对颗粒参数的变化最敏感。图2显示了函数计算对数正态大小的粒子模态半径为的分布,探测深度,云底 米,相位函数被假定为是各向同性的。半角FOV随角度变化间隔0.1mrd。在这里和所有计算中,弥散系数取,折射率为m=1.33,和激光波长如,分布是正常化的保持最小 。虚线图2中的曲线显示了用高斯近似的前向散射peak7;这个近似将在图3(a)至图3中用到说明了所考虑的散射的主要特征几何。对于theta;高斯近似导致散射强度的更快降低与米氏公式相比,随着高度Za的增加,角度分布变得更窄,因此包含有用的信息主要是在小视场。实施非常小的FOV需要良好的激光束对准和转向的高机械稳定性光学。为了减少这些问题,这是可取的因为使用长波长辐射前向散射峰值的宽度,所以是由比例决定。但是,前文所介绍的辐射波长超过1.06mu;m,因为探测器技术的局限性,在检测结束时遇到更多困难。因此,在本文的模型中,我们考虑只有1.06微米的波长。角分布也取决于探测深度∆z。对于所考虑的几何形状,声音的增加深度相当于Za的减少,因为,是比率的函数
。
|
|
|
图3.最小特征值对颗粒大小的依赖性
计算是为Za=500,1000,2000米和∆z=50m 使用(a)高斯近似和(b)Mie公式计算的计算,FOVs在区间,。
3线性独立性的数值测试光学数据
为了分析我们所得到的结果,首先需要一个定量的表征线性独立性的标准的角度谱,这可能是相关到测量误差,如文献所示[13],被认为是线性独立的,如果,其中是最小特征值协方差矩阵C与元素的关系。
线性独立性测试是针对一组进行的,用对数正态分布得到模态半径。弥散因子被假定为对于所有分配都是一样的,并等于,但一般来说,色散的变化也可能包含在建模中。执行测试,第一个元素(对应于PSD与)与每个元素进行比较其余的集合。然后对第二个,第三个和每个后续元素重复该过程。对于每一对,我们形成2times;2协方差矩阵和确定相应的最小特征值。如果所有线对的最小满足要求,各自的数据集是线性的独立。为了比较特征值与相对测量误差,正确的标准化的元素是至关重要的。所有元素都是规范化以保持。
A.散射几何对图像的影响反演精度
粒度估算的准确性取决于散射几何形状,即在云底Za上探测深度∆z。激光雷达FOV作为宽度的同心环的叠加间隔可以呈现。这些环可以作为一套探测器考虑,以及这种环的数量FOV仅由步骤确定的计算。因此我们认为激光雷达具有无限的FOV的数量,所以分配可以任何期望的精度确定。结果获得将定义精度的上限原则上可以通过这种方式实现仪器。最小特征值的依赖性对不同云基的颗粒大小为高度如图3所示。计算特征值间隔与所有计算。对于的每个值,特征值通过比较相应的元素来计算与元素的集合,如前一节所述。最小的这些特征值绘制在图上。该计算是为米和米。FOV包含在间隔,。可取角度尽可能小,因为小角度包含有关大颗粒以及高空中的粒子的信息。对质量的限制以及收集光学元件的清洁度以及激光光束质量使得 合理(回想一下,角度对应于一个一半的激光雷达FOV)。另一方面,在Valcartier[3,4]显示的MFOV激光雷达操作经验表明使用大于10毫弧度的视场使得视场背景信号高于可接受水平。它也是引入了与接受角度有关的问题的滤光片和偏光片。
最小特征值取决于该步骤半径变化的宽度。该越大,分布越独立;因此这个值是可能的一个度量半径分辨率。 可以执行的变化具有恒定的步长,但更具代表性是以步长为准时的情况的一小部分。 然后,半径分辨率可以是估计为。 对于图3所示的曲线,。 因此步长是,和半估计的相应准确度是30%。 虚线显示相应的级别测量精度为=10%。于是只有半径为可以反演。
图4.使用大小反演的准确性估计MFOV激光雷达
粒子的半径随着而变化,对k进行计算k= 1.5,1.3,1.2;Za= 500米,∆z= 50m。
图3(a)中的结果是用高斯近似。 虽然这个近似值并不是很满足,这方便说明几何散射对反演结果的影响。 图3(a)显示出的崛起改变了稳定的范围反演到更小的粒子。 正如我们已经提到,探测深度的增加是相当于的减少,所以增加∆z允许用于在高海拔地区获取大颗粒使用Mie公式导致一个 更复杂的行为,相比高斯近似,如图3(b)所示。主要趋势仍然是一样的:云底的上升将稳定反演的区域转移到更小的半径。 对于大的∆z,方程(1)从到主要由前向散射决定高峰,所以用这个得到的结果高斯和米散射是类似的。
正如我们所提到的,半径分辨率的方法可以通过执行来估计用不同的半径变化步骤进行计算∆R。 计算结果如图4所示。粒子半径随着变化,和和,半径估计的精度分别为,和。 如我们可以看到,对ε=10%和选择的FOV范围,条件满足。于是即使有大量的FOV可用,获取的粒度分布的实际分辨率对于10%的测量误差不能好于30%。
设计中出现的一个重要问题的MFOV激光雷达是所需的范围FOV需要提供粒子的反演尺寸分布在选定的半径范围内选定的高度。估算所需FOV范围的简单方法见参考文献[11]一般来说,大视场命令反演小视窗粒子和小FOV负责如图5所示,反演大颗粒。此图中的计算显示为间隔,,和。对比获得的结果为1-5和范围内,我们可以看到延伸的视场范围朝向小提高了估计小颗粒和大颗粒。 增加范围高达进一步稳定了反演,但正如已经提到的那样,设计具有这样的FOV范围的激光雷达是复杂的任务。
图5. FOV范围对图像的影响可以反演的粒径间隔。
计算是表演theta; 在间隔0.25-5,0.25-1,1-5,和0.1-10 mrad; za= 500米,∆z= 50公尺。
B.估计所需的视野数量
到目前为止,我们已经假设激光雷达有一个无限数量的FOV。但是,为了能够在实际中应用,重要的是要知道有多少需要FOV才能正确表示角度分布。这意味着我们必须进行调查该点的独立程度曲线。或者,我们需要确定如何包含许多独立的信息在的变化中由于变化而产生在不同的声音的粒度分布深处。这样的分析再次依赖于计算协方差的特征值li矩阵。这种方法的使用细节可能在参考文献中找到[6,13]。对于对数正态大小分布与模态半径(在1-200mu;m范围内)对应的角度分布是为固定的计算的za=1000米和一组(在50-200米之间范围);因此MNtimes; MN协方差矩阵元素被构造。例如,如果我们考虑具有不同半径的粒子N=14不同探测深度M=10 ,我们必须构建一个140的矩阵140尺寸。特征模式的数量(独立信息片段)由数量决定特征值为哪个。
图6.不同时间间隔的MFOV激光雷达数据的信息内容alpha;:0.25-5,0.25-10和0.1-10mrad。 虚线曲线显示单个值的结果。
图6说明了信息内容 数据。 特征值被绘制为函数他们的订单号码i。 在这些模拟中,测试三个FOV间隔:0.25-5,0.25-10,和0.1-10毫居里。 范围越大theta;认为,包含在变体中的更多信息角度分布,但对于10%的测量准确度,甚至0.1lt;theta;lt;10 mrad间隔包含不超过六个独立的信息。为了比较,相同的图显示了只有一个探测深度=50时获得的结果 。 在这种情况下,对于FOV间隔0.25-5 mrad,我们只有三个特征值0.01以上
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21900],资料为PDF文档或Word文档,PDF文档可免费转换为Word



