基于对质量、热量、水分、动量的柱积分预算的约束变分分析,ARM(大气辐射测量计划)测量的方法和应用外文翻译资料
2022-11-30 16:50:14

英语原文共 22 页,剩余内容已隐藏,支付完成后下载完整资料
基于对质量、热量、水分、动量的柱积分预算的约束变分分析,ARM(大气辐射测量计划)测量的方法和应用
M.H.ZHANG AND J.L.LIN
纽约州立大学石溪分校海洋科学研究中心地球和行星大气层研究所,纽约石溪
摘要:为了从测量量中推导出网格尺度的垂直速度和平流趋势,制定了一个客观方案来处理少数几个站点网络上大气中风、温度、水汽混合比的测量量。考虑到原始数据必然的不确定性,在这个方案中,为了保证柱积分的质量、水分、静态能量和动量,大气中的状态变量被尽可能小的调整了。这个方案具有多种补充测量的能力,以约束从状态变量中推导出的大尺度的垂直速度和平流趋势。
该方案在1991年4月已被用于处理位于俄克拉马州北部的云和辐射试验台周围的边界设施的大气辐射测量计划的风、温度和水汽混合。结果表明,状态变量与测量不确定因素相适应,可以满足质量、水分、热量和动量的守恒要求。如果不进行这些调整,每个量的列预算中的虚拟剩余资源和下沉量与其他主要组件的量级相同。被诊断出的垂直速度和明显的热量、湿度和动量源的数量保护限制条件的敏感性被提出。结果表明,水分和干静态能量的列预算约束对这些诊断方法有很大的不同,特别是当某些原始的数据丢失,必须使用内插值替换时。
对湿度预算的分析表明,大尺度的收敛往往与降水有关,但是有一些情况,当降水与可降水水分、列水分差异一致时。动量预算分析显示了在对流事件中,大量级下的次网格尺度动量源和下沉量。
1.引言
探测数组的数据可以被用来计算大气柱的垂直速度和平流趋势。这些诊断常常被用于:1)描述大尺度系统的结构和预算;2)驱动半预报方法GCM的物理参数化或单列模式;3)次网格循环在可分解规模场上的诊断效果。对于相关研究的回顾可以在Cotton、Anthes、Emanuel的著作中找到。
当可以获得表面压力、感热通量、潜热通量、降水、风应力和辐射通量时,质量、热量、水分、动量的柱积分预算提供了对垂直速度和平流趋势的精确检验。因为大气测量中不可避免的不稳定性,从测量中计算出的风散度通常不满足质量守恒;因此,在早期研究中,风常被调整以保持空气质量。同样地,测量到的水分和热量的表面通量和边界通量不能满足他们的柱积分预算。然而,对这些不平衡的预算的修正以及它们对被诊断出的大气垂直速度和平流趋势的影响在过去没有得到足够的重视。这可能是由于测量量与探测相关表面的水分和热量的表面通量的数据缺失或不准确。如果被诊断的垂直速度和平流趋势是用来驱动物理参数和模型的话,这些不平衡的预算尤其令人担忧。
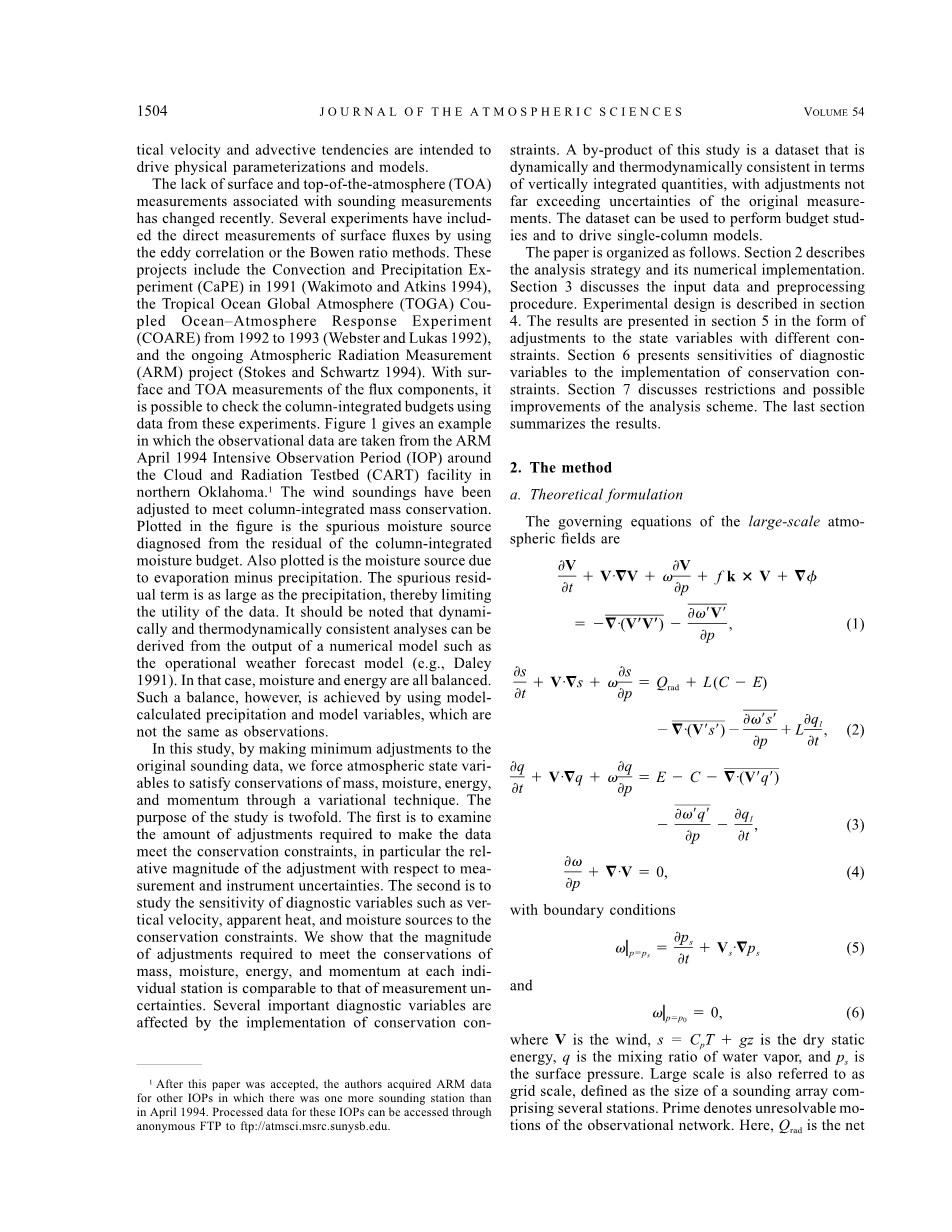
最近,缺乏与探测相关的表面和大气层顶数据已经发了变化。一些实验已经通过使用涡动相关或伯恩比例方法对表面通量进行直接测量。这些项目包括1991年的对流和降水实验、1992-1993年的热带海洋全球大气反应实验,以及正在进行的大气辐射探测项目。通过对通量部分的表面和TOA测量,可以使用这些实验数据来检查柱积分预算。图1给出了一个例子,其中的观测数据取自ARM在1994年4月在北奥克拉荷马州的云和辐射实验台(CART)设施的密集观测周期(IPO)。已经调整了风的数据来满足柱积分的质量守恒。图中绘制的是由剩余的柱积分水汽预算诊断出的虚拟水分来源。同样绘制的是由于蒸发减少降水而产生的水分来源。虚拟的剩余项和降水一样大,因此限制了数据的使用。应该注意的是,动力和热力一致的分析可以从一个数值模型的输出中得出,例如:运行天气预报模型。在这种情况下,水分和能量都是平衡的。然而,这样的平衡是使用模型计算的降水和模型变量得到的,而这些变量和观测结果不一样。
在这个研究中,对原始数据进行最小的调整,我们通过变分法强迫大气状态变量来满足质量、水分、能量和动量守恒。这次研究的目的是双重的。第一是解释使数据满足保护约束所需的调整量,特别是测量和仪器不确定度的相对大小。第二是研究诊断变量的灵敏度,如垂直速度、明显的热量和水分来源的守恒约束。我们证明了在每个单个站点上满足质量、水分、能量和动量守恒所需要调整的大小与测量的不确定度是相当的。一些重要的诊断变量受到了保护约束。这个研究的一个副产品是一个在垂直整合量方面动力和热力一致的数据集,并且调整不超过原始测量的不确定度。这个数据集可以被用于执行预算研究和驱动单列模式。
本文组织如下。第二节描述了分析策略和它的数值实现。第三节讨论了输入数据和预处理过程。第四节描述了实验设计。结果在第五节中以不同约束条件的状态变量的调整形式呈现。第六节介绍了用于保护约束的诊断变量的敏感性。第七节讨论了分析方案的限制和可能的改进。最后一节总结了结果。
2.方法
a.理论公式
大尺度大气场的控制方程
(1)
(2)
(3)
(4)
边界条件
(5)
(6)
V表示风速,s=CpT gz表示干静力能,q表示水汽混合比,ps表示表面压力。大尺度也被称为网格尺度,被定义为一个由几个站组成的探测阵列的大小。角分符号表示观测网格的不可解的运动。这里,Qrad是与云有关的净辐射加热,C是水汽凝结成雨水,E是雨水的蒸发。与冰有关的相变可以包括在内,但是为了简化而忽略了。这里ql是云中液水成分。
所有左边的变量(1)-(4)都能从几个气象站的网络中,通过协调测量风速、温度和湿度来计算。右边的(1)-(4)的项是未知的。它们是大型模型中参数化的主题。它们的验证通常需要左边项的诊断。由于没有预先知道的未知量,上述方程的纵向积分产生以下约束:
(7)
(8)
(9)
(10)
其中
这些是质量、水汽、干静能和动量的柱积分守恒。这里,R是大气层顶(TOA)和表面(SRF)的向下净辐射通量,Ts是表面风应力,Prec是降水,SH是感热通量,Es是表面蒸发。由于理论知识的不足,忽略水平平流湿度计和水平涡度相关项。如果研究时现象的尺度远大于观测网格的尺度,这些忽略将不会对当前研究产生严重影响。
(7)-(10)右边的项能通过表面和卫星观测获得。它们是观测网格内的地区平均通量。该研究的目标策略是约束大气变量来满足(7)-(10)项对直接测量量的最小调整。在考虑仪器和测量的不确定因素如处理丢失的测量数据,和在瞬时探测中小尺度特征与大尺度场的混叠,调整是合理的。
通过最小化成本函数得到标记为V*(u*和v*),s*和q*的分析产品
(11)
(7)-(10)项作为强约束条件,下标o表示直接测量,alpha;表示权重函数。
积分可以用站点和垂直层的总和替代。应该指出的是,我们也可以将以上成本函数的时间积分最小化来进行数据分析。然而,如果数据的不确定性随着时间的推移而保持不变,这样的选择是不合理的,因此这里不适用。
与往常一样,分析的数据通常既不是测量量也不是变量的真实值。因此,分析过程的一个重要方面是,为了直接测量所做的调整的大小进行修正。
由于(7)-(10)的通用约束适用所有模型,所以这种策略并不特定于任何一个模型。应该指出的是大多数可用的同化产品是使用(1)-(4)未知量的参数化。副模式的技巧经常被用于缩小模式产生的变量和观测之间的差异。另一个途径是添加一个推动项到(1)-(4)中来放宽模型变量的观测。虽然这些方法在补充观测缺口的方面非常有用,然而,被同化的数据的效用,对于验证一个模型在(1)-(4)的参数化是有限制的。流行的方法与这些完全依赖于测量的同化方法不同。
图1 1994年4月在ARM CART设备附近通过水分的积分预算诊断的水分残差(实线),虚线表示观测得到的地表蒸发减去降水,已经将风调整来保证垂直方向上的质量,横坐标表示日期
b.数值实现
对于在观测网格中的I站点,每个都有K层,我们使用Xik来标记i站点的k层的状态变量,使用列向量X来标记所有网格中的这个变量,
(12)
上标T表示转置。(11)成本函数可以被写成
(13)
Q是与变量的误差协方差相关的加权矩阵。分析的数据受到(7)-(10)项的强约束。它们可以被写成离散形式
(14)
(15)
(16)
(17)
其中
下标m表示在站覆盖的区域I的平均值。位势高度可以由流体静力平衡的虚温分析求得
(18)
表面压力Ps,表面蒸发、感热通量、表面风应力和云中液体部分不包括在成本函数的调整中,尽管它们的调整是可能的。
分析变量u*, y*, q*, s*的变分方程(欧拉-拉格朗日方程)是
(19)
x*代表u*, v*,q*,s*中的任意一个变量。这里lambda;是拉格朗日乘子。每个变量具有I X K的网格。总共有4个变量和5个拉格朗日乘子,任何给定时间内的变量的总数是4 X I X K 5个。它们是由(19)式中的4 X I X K个方程和(14)-(17)五个方程得出的。这里注意到,拉格朗日乘子仅仅是时间的函数,因为约束条件是垂直积分预算。
我们假设不同地区的测量误差以及变量不相关。协方差矩阵是对角的。对角元素是误差方差的倒数。因此,(19)变为下式
(20)
或
(21)
分析产物等于测量量加上相应的与柱积分质量、水汽、湿静能和动量的灵敏度有关的调整。
(21)和(14)-(17)的数值计算是在迭代模式下进行的。迭代是在整个测量周期中进行的。为了简化描述,我们把迭代描述成一个单一时间水平。整个测量周期的迭代可以通过一个迭代步骤来执行所有连续的时间测量,然后运用到下一个迭代步骤中,直到所有步骤的结束。被描述成单个时间层的迭代包含三步。第一步,使用预估或初始观测,并利用(14)-(17)的公式来计算每个在(21)式右边的偏导。由于偏导数不需要垂直总和,所以真实的数值计算可以化简。任何给定时间内,偏导数的总数是5 X 4 X I X K,和每个站和层上的5个约束条件都有四个变量。
(14)-(17)式约束的一般形式可以写成
(22)
在个迭代中,可以写为
(23)
n表示迭代索引。当(21)被写为
(24)
B是第一步的偏导形式,将(24)带入(23)生成一个线性化方程组。特别地,替代物给出如下
(25)
由于上面的运算符的线性性,它可以被进一步写成
(26)
这个五个约束条件的5个方程的设置,可以在任何时候用于lambda;的计算。这构成了迭代的第二步。
在第三步,这些调整是通过使用新获得的lambda;来计算的。之后,进行下一步迭代。在我们的计算中,好的迭代的收敛发生在20个循环的迭代周期内,质量、湿度、热量和动量的综合平衡在所有时间水平中超过0.1。
注意时间导数出现在(14)-(17)中,因此,每次都有超过一个测量时间。(14)-(17)中,使用与前一个迭代周期相同的中央差分格式来计算时间的导数。这就是为什么实际的迭代需要在整个测量周期内完成。还注意到因为中心时间的差异,我们不调整第一次和最后一次测量的水平,预算不是在这两个时间水平上得到的。如果使用前和使用后的时间差分格式被用于这两个时间水平,可以将它们包含在分析中。
我们还注意到,可能有其他可用的算法来获得(13)在(14)-(17)的约束下的最小化解,例如使用最大梯度下降法。
我们也注意到可能还有其他的算法来获得在(14)-(17)约束条件下的(13)的最小化解,例如使用一个最大梯度下降方法。副方法在这里不能被简单的应用,因为没有可以用时间积分的模型。上面描述的迭代过程之涉及到解决线性方程的问题,似乎对我们的目标非常有效。然而,我们欢迎读者介绍更多的有效算法。
离散度的计算是先假设向量沿着最外域的方向是线性的,沿着连接各点的外域,然后取垂直于两边的收敛通量除以域的面积。这表示一个区域平均散度。梯度的计算方法是使用一个多线性场的最小二乘法对数据进行计算,然后计算导数。详细过程与Davies-Jones描述的通量方法一样。Davies-Jones指出,当使用三角形定义的三个场时,这个过程等同于几个散度和梯度计算方法,包括Bellamy的图解法和空间线性拟合。需要指出的是虽然分析是独立于一些特定模式,但也有可能分析需要依靠数值逼近。通过使用各种现有数值方案来计算(14)-(17)式来进行敏感性研究。研究发现,这些数值似乎并不影响到分析的程度。
3.数据和预处理
a.输入数据
可以将输入测量值分为两部分。第一是对需要调整的变量测量。第二是对变量的度量,以形成约束。在本次研究,调整变量是状态变量,也就是风,温度和湿度。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21819],资料为PDF文档或Word文档,PDF文档可免费转换为Word



