新型混合动力机床两个三自由度并联机构的动态性能比较及配重优化外文翻译资料
2023-09-25 09:34:23
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
新型混合动力机床两个三自由度并联机构的动态性能比较及配重优化
摘要
目前大多数全并联机器人都有一个共同的缺点,即,它们的旋转能力较低。为了克服这一困难,本文提出了一种具有高旋转能力的三自由度全并联机构。平行四边形允许输出链路相对于输入链路保持固定的方向,对于输入链路它有许多独特的作用,特别是在设计并联机器人时创建理想的自由度输出时。本文所描述的平行四边形的作用,完全用于设计一种新型的并联机械手族。在这个系列中,并联机械手的移动平台通过三条不相同的腿与底座相连。旋转自由度所涉及的关节均为单自由度,保证了机器人的高旋转性能。本文提出的并联机器人在工业机器人、仿真器、微运动机器人、并联运动学机器以及其他需要高转动能力的操纵装置中有着广泛的应用。该研究为新型并联机器人的设计提供了一种新的方法。
2004年爱思唯尔有限公司
关键词:并联机械手;旋转能力;平行四边形;运动学;奇点
*通讯作者。
邮箱:xinjunl@yahoo.com (X.-J.)刘)。
0094-114X/$ - 2004爱思唯尔有限公司保留所有权利。
476 X.-J。刘等/机械原理40 (2005)475-494
1. 介绍
并联机械手通常由两个刚体组成,一个是可移动的,另一个是固定的,通过至少两条运动链相互连接。该机械手具有机械刚度高、带宽宽、负载/重量比好等优点,在许多工业应用中很受欢迎。例如,在1965年,Stewart平台被提议设计一个运动模拟器[1],其中需要6个空间自由度(DoFs)。自那时起,人们对许多具有特定类型和数量的自由度的并联机械系统和机械设计方法进行了广泛的研究。他们已经应用于工业世界的多样性,例如,飞机模拟器[2],可调铰接桁架[3],手腕[4],高性能camera-orienting设备[5],工业机器人[6],[7]力/力矩传感器,显微操纵器(8、9),触觉设备[10],线机器人[11],采矿机[12],[13]地震设备,医疗设备[14],尤其是最近开发的潜在应用在机床和并行运动机器[15]。其中,Delta[16]的智能简约设计取得了成功。它无疑讲述了并联机器人成功应用的非凡故事。现在Delta可以广泛地应用于取放应用程序和机床中。
不难发现,大多数的努力是贡献给3自由度或6自由度并联机器人。在空间三自由度并联机器人的情况下,输出仅限于纯平移[16-18]、纯旋转[19,20]和复杂运动1[22]。摘要具有3自由度的机械手很少能将空间旋转自由度和平移自由度结合起来,从而达到与复杂运动相反的更精确的运动。可见,具有完全平行运动学的三自由度并联机器人均具有有限的旋转能力,这无疑是工业应用中最重要的性能之一。因此,提出高旋转能力并联机器人是该领域最重要的研究目标之一。
平行四边形使输出链路相对于输入链路保持固定的方向,在并联机器人的设计中发挥着独特的作用。第一个涉及平行四边形概念的设计是Delta robot[16],其中三条腿分别由一个空间SSSS (s -球关节)机构组成。在Delta中,当机器人处于活动状态时,每条腿上的四根杆中的每两根都应该是平行的,Delta可以输出三个平移自由度。平面四杆平行四边形的概念于1992年首次应用于类星机器人[17]的设计中,该机器人也具有三个平移自由度。继续吸引研究人员的注意,例如,在2001年[23]提出了空间三自由度并联机械手HALF,由第三条腿上的平行四边形组成。在这些设计中,平行四边形保证了所需的自由度输出,例如,对于Delta和星形,不需要旋转自由度,只需要旋转一半。
本文的目的是提出一种新的三自由度全并联机器人族。这个系列的新奇之处在于,在所有封闭式并联机器人中,至少有一条腿是由平面构成的
复杂运动被定义为旋转和平移的同时结合。画在物体上的任何参考线都会改变它的直线位置和角度方向。物体上的点会沿非平行路径运动,在每一个时刻,都会有一个旋转中心,不断地改变位置[21]。
X.-J。刘等/机械原理40 (2005)475-494 477
四平行四边形。这些并联机器人具有较高的旋转能力和较好的刚度。它们在工业世界可能有潜在的应用。
2. 平行四边形的概念2.1。描述
众所周知的Delta机器人[16]如图1所示,其中三条腿分别由一个空间四杆机构组成。这四根棒子是用球形接头连接起来的。虽然这是一种空间机制,但这四根杆中的每两根应该在任何时刻都是平行的,其中有三个平动自由度。该设计概念于1999年被提升到一个新的四自由度并联机器人家族,H4,[24]。这一概念对于平面四杆平行四边形并联机械手的设计具有重要意义。平面四杆平行四边形的机构是通过转动关节将四杆端到端连接起来。从那时起,平行四边形的概念引起了许多研究者的关注,例如都灵[26]具有6个dof, CaPaMan[13]具有3个dof。2001年,提出了一种空间三自由度(两个平动自由度和一个旋转自由度)并联机器人HALF[23,27],其中第三条腿由保证旋转自由度输出的平行四边形组成。该机械手的特殊优点是其高转动能力,如plusmn;45,由于所有的单自由度关节参与转动自由度。利用平行四边形的概念,提出了一种双平移DoFs并联机构[27]。最近,该机构被应用于五轴机床[38]的设计,需要高刚度。
图1所示。三角洲的机器人。
478 X.-J。刘等/机械原理40 (2005)475-494
2.2。优势
图2所示。平面平行四边形。
虽然输出链路上任何点的轨迹都是圆,但平面平行四边形允许输出链路相对于输入链路保持固定的方向。这就是为什么这些并联机器人使用平行四边形的概念。特别是处理UU链是非常有用的。在上述设计中,平行四边形起到了保证期望输出的作用,如星形和Tsai s机械手不旋转DoFs,以及两平移DoFs并联机构[27,38],一转半。
另一方面,平面平行四边形作为一条腿,可以起到提高系统运动学性能的作用。通常,对于大多数并联机器人来说,腿上的固定连杆只是一个杆。如果腿是由一个简单的机构构成的,并联机械手将具有更好的运动学和动力学性能。第一个在腿部运动学中使用简单机构的设计是由Hudgens和Tesar[28]提出的微操作器,每条腿由安装在底座上的四杆机构驱动。从而提高了机械手的位置分辨率。Tahmasebi[29]提出了一种采用平面二自由度五杆机构的六自由度并联机械手,改进了机械手的位置分辨率、刚度和力控制。Frisoli等人开发了一种具有大的各向同性工作空间的肌腱驱动五杆机构,并将其应用于6自由度触觉装置的腿上,使其具有良好的运动学各向同性和加速能力。Chung和Lee[31]提出了一种新的2自由度并联机械手,每条腿都包含一个四杆机构,在运动性能和静态平衡[32]方面具有优势。
设计机械手的另一个优点是,利用平行四边形作为每条腿的恒定连杆,可以大大提高腿的刚度。不用说,平行图相对于单根杆有更高的刚度。例如,两个平移DoFs并联机构的两条腿各有一个平行四边形,这在很大程度上提高了机床的刚度[38]。不仅如此,还可以通过增加冗余约束进一步提高腿的刚度。例如,平行四边形的设计如图3所示,其中平行四边形的数量增加。无疑,越平行越好
X.-J。刘等/机械原理40 (2005)475-494 479
图3所示。具有冗余约束的平行四边形的设计实例。
腿的g值越大,机械手的刚度越高,由于冗余约束的原因,其制造精度要求也相对较高。
2.3。缺点
采用平行四边形设计并联机器人的优点是:输出自由度大,刚度高,运动学和动力学性能好。相比之下,其缺点是结构复杂,相比于转动关节和一个常连杆的组合。在平行四边形中,有四个转动关节和四个连杆。所有关节的轴应该是平行的,四个连杆中的每两个的长度也应该是相等的。因此,加工精度必须足够高,否则会导致误差的积累,最终导致器件的误差积累。但是,所有的关节都是单自由度的,这不是一个关键问题。与平行四边形的优点相比,复杂的结构是可以接受的。因此,设计平面四杆平行四边形的并联机械手是很有价值的。
摘要利用平面四杆平行四边形的期望输出特性,提出了一种具有高旋转能力的三自由度全并联机器人。
3.新家庭
三自由度并联机器人的种类很多。平面3-RRR (r -转动关节)并联机械手就是一个例子[33,34]。移动平台有三个平面的DoFs,它们是沿着x轴和y轴的两个平移和一个绕垂直于O - xy平面的轴旋转。另一个例子是球形3-RRR并联机械手[19,35],本设计中所有关节轴相交于一个公共点。机械手中任意一点的运动都是围绕该点旋转。移动平台相对于基座只有定向的自由度。Hunt提出的3-RPS (P-prismatic joint, P-prismatic joint)并联机器人[22]是其中的一种,虽然它有三个自由度,但结构复杂。最著名的三种翻译机器人是Delta[16,36],由Clavel提出,由Demaurex公司和ABB以IRB 340 FlexPicker的名字进行营销,在工业上非常成功。
480 X.-J。刘等/机械原理40 (2005)475-494
三自由度并联机械手的另一种类型是移动平台通过四条腿与底座连接,其中四条腿为被动腿,也是前导腿。这意味着腿决定了移动平台的运动,例如,在汉诺威大学[37]的IFW机床设计中使用的球坐标并联机械手。实际上,它不是完全平行的机械手。
虽然3自由度并联机器人数量众多,但输出仅限于平面DoFs、纯平移、纯旋转或复杂运动,而球面坐标并联机器人[37]输出的结构只有两个旋转和一个平移。具有高旋转能力的三自由度并联机器人是平面运动学中的一类。空间三自由度并联机器人具有较高的旋转能力和一定的运动特性,一直是该领域的研究热点。
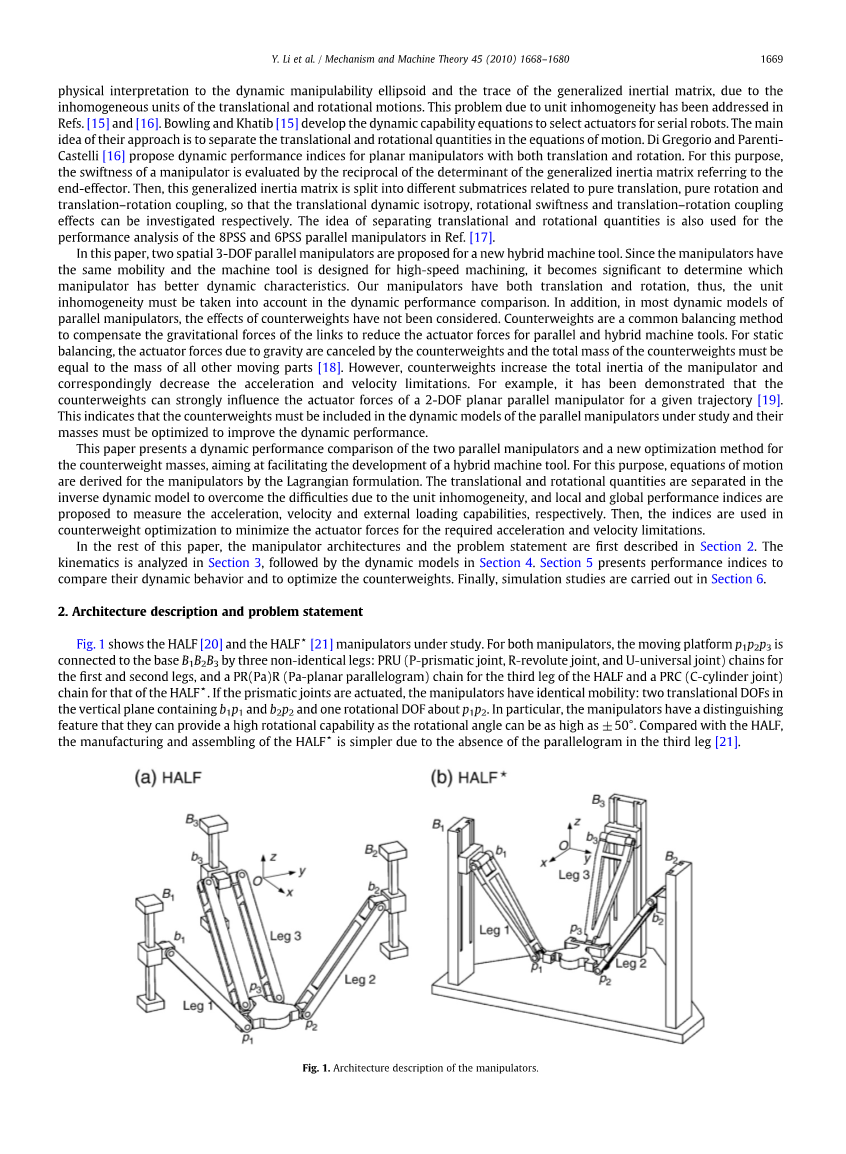
在2001年,提出了一种新型的并联机械手HALF,如图4(a)所示,其中移动平台通过三条不相同的腿与底座连接,第一和第二腿为PRU链,第三腿为PR(Pa)R(“Pa”表示平面平行四边形)链。机械手有两个翻译O-yz平面上绕轴旋转,三自由度空间,此外,转动能力可以达到很高的高达plusmn;45。带有转动执行机构[39]的半机械手如图4(b)所示,其中两根RRU链和一条RR(Pa)R链为两腿。在这两种设计中,第一腿和第二腿应该在同一平面上。与移动平台相连的U型关节中两个转动关节的轴线应该是共线的,而与移动平台相连的第三条腿的转动关节的轴线应该与这两个轴平行,如图4所示。一半的万向节可以用球面关节代替,因为它有独特的第三条腿。
对于图4(a)所示的机械手,如前所述,两个转动关节的共线轴导致了对第一和第二腿进行重新设计的动机,如图5所示。在这两种设计中,两个转动关节组合成一个转动关节。在图5(a)中,第一和第二腿通过一个转动关节连接到移动平台上。在图5(b)中,带有PRR链的第一和第二支腿连接到一个定向杆2上,该定向杆2通过转动关节连接到移动平台1上。如果图4(a)所示的机械手运动学链为2-普鲁士- 1- pr (Pa)R,则两种设计的机械手运动学链为(PRR) 2R-PR (Pa)R。这种改进对机械手的转动能力没有负面影响,也可以推广到图4(b)所示的半机械手上。
图4所示。并联机构的一半。
X.-J。刘等/机械原理40 (2005)475-494 481
图5所示。修改版本的一半。
图6所示为一种名为HANA的并联机械手。图6(a)为移动执行机构机械手,图6(b)为转动执行机构机械手。如图6(a)所示,移动平台通过PRU链和两条PR(Pa)R链与底座连接。机械手是一种通用的操纵装置,当移动执行机构处于活动状态时,机械手必须具有三个自由度。由于链接的安排和机械手的关节,三条腿的组合约束的旋转移动平台对x, z轴和翻译以及轴,留下两个平移自由度的机械手O-yz平面和一个转动自由度轴。表1为机械手能力描述。我们可以看到二分之一和HANA的输出是一样的,但是这两个机器人在转动自由度上有显著的不同。利用PR(Pa)R链结合第一和第二支腿,得到HANA的转动自由度。这种情况与图6(b)所示的带有转动执行机构的HANA相同。也就是说,在HANA中,DoF的驱动是多余的,但不是一半。
另一个空间三自由度并联机器人HALF -II,如图7所示,采用2-P(Pa)R-1- pr (Pa)R链。表2详细展示了机械手的能力,即第一腿本身可以
图6所示。HANA并联机构。
482 X.-J。刘等/机械原理40(2005)475-494表1
基于移动执行机构的HANA机械手的约束和自由度分析
单腿 三脚组合
不。链型约束约束仍然是DoFs
其中P为移动关节,R为转动关节,U为万向节,(Pa)为平行四边形,T为平移,RO为旋转,其中下标表示自由度。
图7所示。半ii的运动结构。
表2
半ii的约束条件和自由度
单腿 三脚组合
不。链型约束约束仍然是DoFs
其中P是移动关节,R是转动关节,(Pa)是平行四边形,T是平移,RO是旋转,其中下标表示自由度。
用沿x轴的平移和绕z轴和x轴的旋转来约束移动平台。第二支链可以与第一支链相同,也可以与第一支链不同,例如,第二支链可以是PyRxUxy链。第一腿和第二腿的组合也可以为机械
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[609921],资料为PDF文档或Word文档,PDF文档可免费转换为Word



