基于运动想象的脑控机器人系统设计开题报告
2020-03-27 11:28:34
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
随着社会与科技的发展,越来越多具有特定功能的机器人真的出现在我们的视野里,他们会打招呼会行走,但是曾经无一例外需要依靠电气系统或者人类操控。而在近十年,脑控机器人从概念慢慢成为了现实。顾名思义,脑控机器人是能够直接被人脑控制的机器人,包括运动方向甚至速度,实现方式是将人脑电波转换成指挥机器人的命令。
在《钢铁侠》中,托尼·斯塔克利用钢铁战甲进行战斗,他的伙伴从程序化的机器人小呆变成了能与他进行交流协助他战斗像拥有人脑可以思维对话的贾维斯。曾经以为遥不可及的科幻场面,或许能成为现实,依靠运动想象的脑控机器人,能够直接由大脑控制读取人脑信号的机器人,必定会为人类生活带来更多的方便。
2. 研究的基本内容与方案
 本文拟设计一个基于运动想象的脑机接口系统以控制机器人,利用目前常用的支持向量机(support vector machine,svm)算法实现运动想象脑电信号多分类,设计上位机软件实现与脑电信号处理模块的数据通信,研究基本的机器人运动控制算法。
本文拟设计一个基于运动想象的脑机接口系统以控制机器人,利用目前常用的支持向量机(support vector machine,svm)算法实现运动想象脑电信号多分类,设计上位机软件实现与脑电信号处理模块的数据通信,研究基本的机器人运动控制算法。
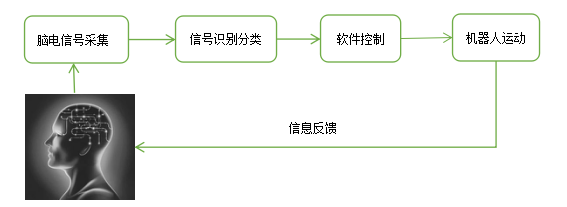
脑机接口是一种不依赖于大脑的正常输出通路的脑机通讯系统,实质是通过对脑电信号的分析来推断人的想法或者目的,从而实现人机交流,其系统组成如下:
3. 研究计划与安排
第1-4周:查阅相关文献资料,明确研究内容,了解研究所需理论基础。确定方案,完成开题报告。
第5-6周:熟悉掌握基本理论,完成英文资料的翻译,熟悉相关工具软件的使用。
第7-9周:实现运动想象信号分类算法。
4. 参考文献(12篇以上)
[1] sun l, feng z r. classification of imagery motor eeg data with wavelet denoising and features selection[c]// international conference on wavelet analysis and pattern recognition. ieee, 2016:184-188.
[2] dong e, li c, li l, et al. classification of multi-class motor imagery
with a novel hierarchical svm algorithm for brain-computer interfaces[j]. medical amp; biological engineering amp; computing, 2017, 55(10):1809-1818.



