基于EKF的感应电机无速度传感器控制研究毕业论文
2020-04-05 10:58:59
摘 要
随着电力电子技术与控制技术的快速发展,感应电机控制技术也被广泛的运用与研究,感应电机的无速度传感器矢量控制技术,逐渐成为研究的热点。
首先,本文讲述了感应电机无速度传感器控制技术的发展背景与国内外地研究现状,分析与比较了几种常用的无速度传感器控制方法。
然后,建立了感应电机在三相坐标系下以及两相坐标系下的数学模型并推导出状态方程,接着阐述了坐标变换原理、矢量控制基本原理,并将其与感应电机数学模型相结合,建立了感应电机无速度传感器矢量控制系统。
最后,阐述了卡尔曼滤波算法及其拓展为扩展卡尔曼滤波算法的原理,并将其应用于感应电机的矢量控制系统中,构建出基于扩展卡尔曼滤波的感应无速度传感器控制系统。并在Matlab/Simulink环境下搭建出仿真模型,仿真结果验证了基于EKF的感应电机无速度传感器矢量控制的有效性与合理性,证明了利用扩展卡尔曼滤波算法可以有效实现对感应电机状态参数的辨识。仿真结果较为理想,实验较为成功。
关键词:感应电机,矢量控制,数学模型,扩展卡尔曼滤波
Abstract
With the rapid development of power electronics technology and control technology, induction motor control technology has also been widely applied and studied. Speed sensorless vector control technology of induction motor has gradually become a research hotspot.
First of all, this paper describes the development background of induction motor speed sensorless control technology and the current research status at home and abroad, and compares and compares several common speed sensorless control methods.
Then, the mathematical model of induction motor in three phase coordinate system and two phase coordinate system is established and the state equation is derived. Then the principle of coordinate transformation and the basic principle of vector control are expounded, and the vector control system of induction motor speed sensorless sensor is established by combining it with the mathematical model of induction motor.
Finally, the Calman filtering algorithm and its extension to the extended Calman filter algorithm are introduced, and it is applied to the vector control system of induction motor, and an induction speed sensorless control system based on extended Calman filter is constructed. The simulation model is built under the Matlab/Simulink environment. The simulation results verify the validity and rationality of the speed sensorless vector control of induction motor based on EKF. It is proved that the identification of the state parameters of induction motor can be effectively realized by using the extended Calman filter algorithm. The simulation results are more ideal and the experiment is more successful.
Key Words:induction motor, vector control, mathematical model, extended Calman filtering
目录
摘 要 I
Abstract II
第1章 绪论 1
1.1 课题研究背景与意义 1
1.2 国内外研究现状 1
1.3 本文主要研究内容 3
第2章 三相感应电机的数学模型 5
2.1 三相感应电机数学模型及其分析 5
2.1.1 感应电机在静止三相坐标系下的数学模型 5
2.1.2 坐标变换 8
2.1.3感应电机在两相静止坐标系下的数学模型 12
2.1.4感应电机在两相同步旋转坐标系下的数学模型 13
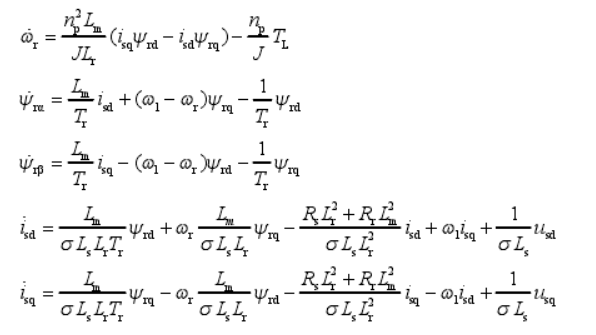
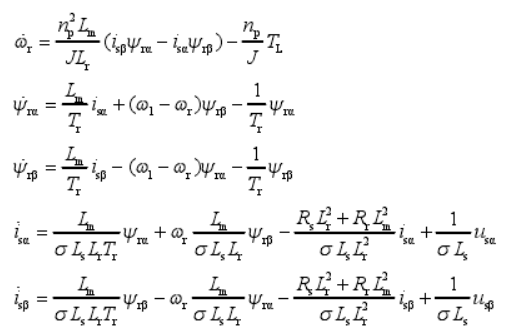
2.2感应电机在两相坐标系下的状态方程 14
2.3本章小节 16
第3章 矢量控制基本原理 17
3.1 基于转子磁场定向的矢量控制基本原理 17
3.1.1 矢量控制原理 17
3.1.2 基于转子磁场定向的感应电机数学模型 18
3.2 感应电机无速度传感器矢量控制系统结构 20
3.3 本章小节 21
第4章 基于扩展卡尔曼滤波的无速度传感器矢量控制系统 23
4.1 卡尔曼滤波算法原理 23
4.1.1 卡尔曼增益矩阵的选取原则 23
4.1.2 卡尔曼滤波计算流程 26
4.2 扩展卡尔曼滤波 27
4.2.1 利用泰勒展开式处理非线性模型的线性化方法 27
4.2.2 扩展卡尔曼滤波的算法流程 29
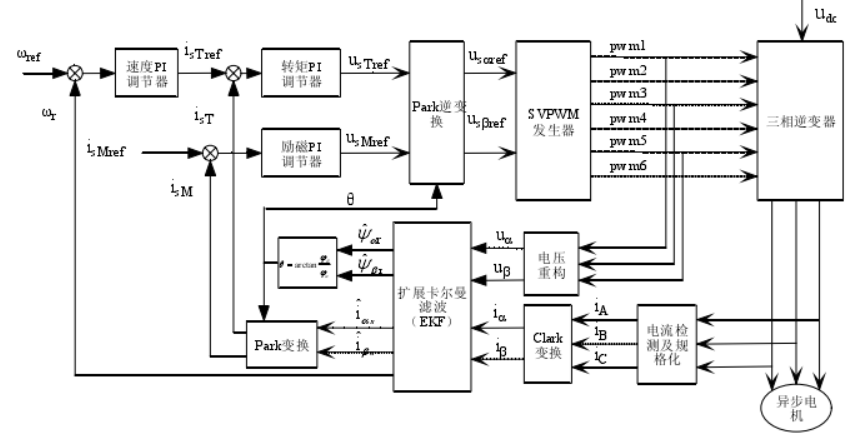
4.3 基于扩展卡尔曼滤波的感应电机无速度矢量控制系统 30
4.4 控制系统运行仿真 33
4.4.1 控制系统仿真平台搭建 33
4.4.2 控制系统仿真及结果分析 33
4.5本章小结 36
第5章 总结与展望 37
参考文献 38
致 谢 40
第1章 绪论
1.1 课题研究背景与意义
在感应电机的控制系统研究中,转速闭环控制是一个极为关键的环节,合理的转速闭环控制系统不仅可以降低控制系统的复杂度,而且可以提高控制系统的准确度。如果用传统的速度传感器来识别感应电机转速,首先零件的安装过程会十分复杂,而且在一些苛刻的环境下无法进行顺利的安装与检查,导致速度传感器的使用非常复杂,并且传统的速度传感器容易遭受外界环境与随机干扰因素的影响,稳定性差,精度低,不能得到广泛应用[1]。而近来所研究的无速度传感器可以有效避免这些弊端,成为近来研究的焦点。近年来,无速度传感器的控制技术得到了很多研究,有如下几种方法:直接计算法、扩展卡尔曼滤波算法、模型自适应法、神经网络法、高频信号注入法、滑膜观测器等。
综合分析以上几种方法,扩展卡尔曼滤波算法(EKF)是一种非常有效实用的计算方法,它可以将繁琐复杂的高阶非线性控制系统线性化,大大降低计算难度,提高计算的准确度[3]。基于扩展卡尔曼滤波算法的感应电机控制系统可以有效降低外界噪声与环境干扰信号的影响,能够准确有效地辨识感应电机的状态参数再加上电力电子技术的发展与控制技术的进步,将扩展卡尔曼滤波算法与控制系统相结合已经不是一件难事,得到越来越广泛的应用
1.2 国内外研究现状
速度闭环控制需要速度传感器, 这就增加了速度控制系统的成本和复杂程度,而速度传感器无法在一些苛刻的条件下安装。而无速度传感器则避免了速度传感器的这些缺点,它可以提高系统的稳定性,使系统体积变小、重量减轻,从而降低了控制系统的复杂程度,因此无,无速度传感器得到了广泛地应用。通常,无速度传感器有下面几种方法:
- 直接计算法 实际转速与转差的和为同步转速,直接计算法通过对感应电机建立数学模型,然后运用数学计算的方法直接计算得出同步转速与转速差,然后用同步转速减去转差就可以得到实际转速。直接计算法是基于开环控制的,缺乏转速反馈环节,即便计算过程简单,但是它的采样值受外界干扰及环境影响大,因此可能会产生很大的误差,所以此方法的准确度与精度不高,对状态参数的辨识效果很差。
- 模型参考自适应 模型参考自适应系统法(MRAS)辨识速度的主要思路是:关于同一个研究对象(感应电机),将两个感应电机控制系统作比较,其中一个感应电机控制系统构建的模型状态参数中不含速度,我们把这个控制系统称为参考系统模型,而另一个感应电机控制系统构建的模型状态参数中包含转速,这两个系统有各自的输出量,而输出量是有误差的,我们根据这两个系统的输出量误差构建出自适应模型,而这个自适应模型是可以根据实际情况调整的,通过调整模型的参数来使误差最小甚至逼至零,这样可以用感应电机的输出来跟踪参考系统模型,达到自适应控制的目的[4]。模型参考自适应有较快的速度响应,计算简单,能够保证估计的逐渐收敛性,容易在控制系统中实现。根据选取的参考模型以及可调模型不同,衍生出多类转速估计方法。
下面介绍一种最广泛应用的模型参考自适应系统法转速估计:把从转子磁链中观测得到的电压模型作为参考模型,把含有速度信息的电流模型作为可调模型的算法。该算法充分利用了磁链观测过程的计算结果,速度估计的实现也仅需小幅计算。由于采用的参考模型为电压模型,引进了纯积分环节,这使得磁链模型受积分值的影响非常严重,速度估计结果不准确,低速性能较差。
- 扩展卡尔曼滤波算法 卡尔曼滤波算法是一种应用于线性系统中的迭代估计算法,然而感应电机的数学模型是非线性化的,因此难以直接用卡尔曼滤波算法来分析与计算感应电机数学模型,为了解决这个问题,需要将非线性数学模型线性化,便延伸出了扩展卡尔曼滤波算法。扩展卡尔曼滤波算法可以将非线性部分做处理从而将其转化为线性问题来处理,原理是利用泰勒展开式,保留一阶项,而将高阶项忽略。扩展卡尔曼滤波算法可以尽可能的减少环境噪声与外部信号干扰的影响,而且错误地控制系统的状态估计也会被当作外部干扰来处理,这样可以提高状态变量估计的精度与准确性,扩展卡尔曼滤波算法更是具有良好的动态跟踪性能,抵抗随机干扰性能,具有很好的鲁棒性,因而此方法称为非线性控制系统估算研究的热点。
- 基于神经网络算法的方法 该方法是通过训练来识别非线性系统,是一个根据逻辑规则来推理的过程,将感应电机控制系统的状态变量这些信息变成一种概念,用符号来表示,然后根据符号运算进行逻辑上的推理。人工神经网络模拟了人脑的逻辑思维,可显示出人脑的某些特征,它由大量的基本原件组成,类似于人脑中的神经元,通过网络的学习,使网络减少下一次犯同样错误的可能性。人工神经网络算法在优化非线性系统、信号处理方面有很大的应用前景,但是目前还仅仅停留在理论仿真阶段,并没有得到实际的广泛应用[5]。
由此可见,扩展卡尔曼滤波算法是目前研究较为理想的一种方法,也是一种应用较为
广泛与成熟的方法,对于感应电机无速度传感器控制系统的研究,利用扩展卡尔曼算法来简化控制系统的复杂非线性数学模型是十分必要的,扩展卡尔曼滤波算法的降低计算量、鲁棒性好、抗干扰能力强的优点使其被广泛认为是一种非常好的无速度传感器感应电机转速辨识方法。
1.3 本文主要研究内容
在异步电机的同步坐标系数学模型的基础上,提出一种基于EKF的无速度传感器矢量控制方法,该方法的突出特点即预期目标是:(1)降低方程迭代的阶数,避免微分计算,减少系统复杂度,不降低系统系能,降低系统的运算量。(2)可以减少控制系统在测量时受到外界信号和环境噪声的影响(3)用扩展卡尔曼滤波算法进行一阶线性的滤波器估计,方法简便可靠、运算量低、收敛速度快(4)该方法基于系统的随机过程模型,具有较强的抵抗噪声能力,这是它优于其他的速度识别方法的方面,并且可以在很大程度上避免感应电机模型的非线性与随机性,具有十分不错的估算性能。
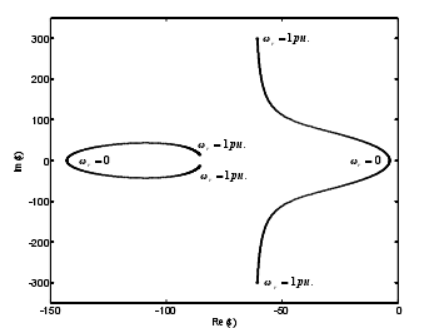
为使控制系统达到上述要求,满足上述的特点,将会研究以下几个方面:(1)感应电机在不同坐标系下的数学模型,包括三相静止坐标系、两相静止坐标系、两相旋转坐标系下的数学模型,并且以此模型为基础构建感应电机在两相坐标系下的状态方程(2)根据感应电机的数学模型,运用自动控制理论的根轨迹法来分析感应电机的状态方程(3)分析矢量控制的基本原理并学会应用,将原理与感应电机的数学模型相结合,建立出感应电机无速度传感器矢量控制系统(4)了解卡尔曼滤波算法原理,特别是其在非线性系统中的应用,掌握扩展卡尔曼算法矩阵的算法原理与计算流程,并将其与感应电机控制系统相结合,建立起基于扩展卡尔曼滤波算法的感应电机无速度传感器矢量控制系统。(5)用MATLAB搭建仿真平台,对结果进行分析与比较。
研究的基本内容流程图如下图所示:
图1研究的基本内容流程图
第二章 三相感应电机的数学模型
2.1 三相感应电机数学模型及其分析
2.1.1 感应电机在静止三相坐标系下的数学模型
上节提到,扩展卡尔曼滤波算法可以有效简化与计算感应电机的控制系统,感应电机的控制系统模型是一个复杂的非线性数学模型,这是因为感应电机的输入变量有多个,如电压、频率等,而且这两个变量之间是相互独立的,它的输出变量很有多个,如转速、频率,如果通入的是三相电流那么状态变量将更为复杂,由此可见,感应电机的多变量系统的多输入与多输出的。转矩是磁通量与电流的乘机,旋转感应电动势是转速乘以磁通量,而且感应电机的控制系统是一个动态的过程,定子、转子都是有三相绕组的,因此其控制系统是非常复杂又高阶的,即便忽略环境因素与随机信号干扰,系统数学模型至少为7阶以上。总而言之,三相异步电机的数学模型是一个高阶、非线性、强耦合的多变量系统[1]。
在构建感应电机的数学模型时,为了便于计算与分析,在实际允许的情况下,我们需做以下假设:
1.没有磁饱和的现象,电机参数如绕组的自感系数与互感系数以及绕组电阻值是不变的;
2.忽略气隙磁场谐波的高次项,产生正弦的气隙磁通,
3.忽略铁芯中的磁滞和涡流损耗;
4.设三相定子绕组和转子的分布是理想对称的,彼此之间相隔120°。
三相感应电动机的物理模型如图2-1所示,图2-1中的定子三相对称绕组轴线(A,B,C)是固定在空间中的,并且彼此相差120电角度,而转子的对称三相绕组(a, b,c)与转子同步旋转。用右手螺旋定则来判别各绕组的相电压、电流和磁场的正方向,把A相绕组的轴线作为参考坐标轴,空间角位移变量是转子a轴和定子A轴相差的的电角度[9]。这样,三相异步电动机在三相静止坐标系下的电压方程、磁链方程、转矩方程和运动方程便可以得到。
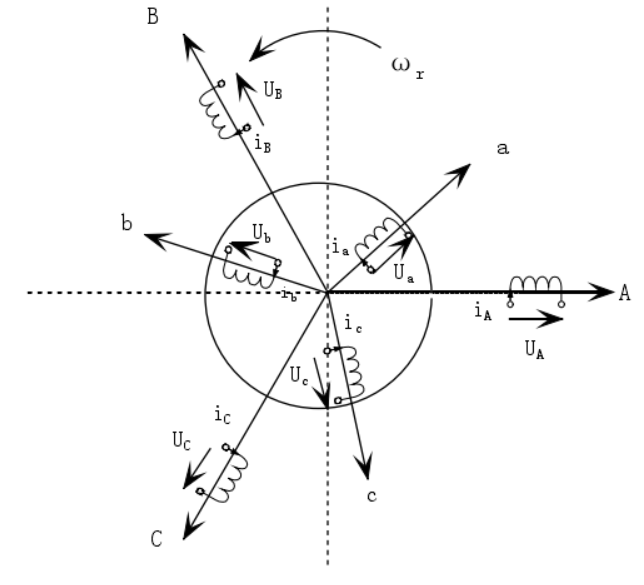
图2-1 三相感应电机的物理模型图
在静止A-B-C坐标系下,异步电机的数学模型为
- 电压方程
定子三相绕组的电压方程是
转子三相绕组电压方程是
式中,Ua、Ub、Uc、UA、UB、UC——转子、定子相电压瞬时值
ia 、ib、 ic、 iA、 iB、 iC——转子、定子相电流瞬时值
 ——定子、转子每相绕组磁链瞬时值
——定子、转子每相绕组磁链瞬时值
上式也可以用矩阵表达,如下
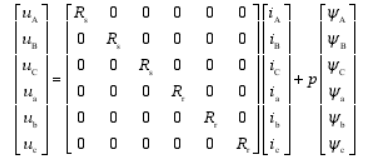
或表示为
- 磁链方程
 磁链方程可表示为
磁链方程可表示为
- 转矩方程
根据机电能量转换原理,可以得到三相感应电机的电磁转矩为
- 运动方程
可以用运动方程来描述电力拖动系统中电磁转矩Te、负载转矩Tl与转速w之间的关系,即
其中,TL-负载转矩; J-转动惯量
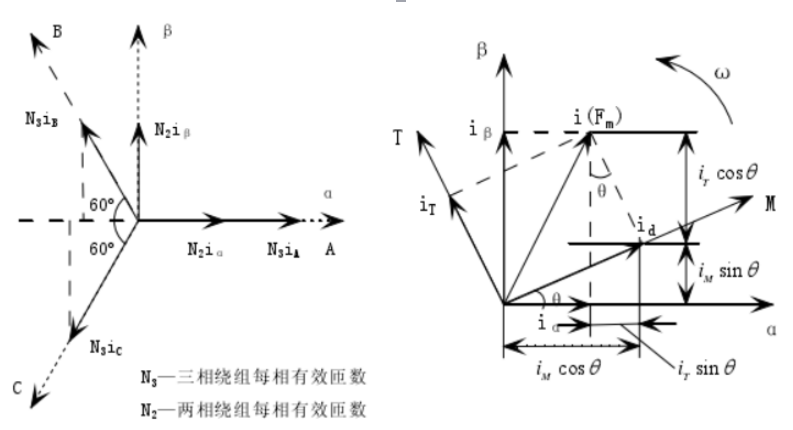
2.1.2 坐标变换
从上一节中得到的方程容易看出,异步电动机的数学模型是非线性而且十分复杂的,因此很难对其进行直接分析,更难对此非线性方程进行求解,因此我们需要通过坐标变换,将异步电动机的数学模型做适当的简化,从而更好的对其进行分析与相关计算
直流电机的数学模型阶数小,计算简便,运算量小[10],而如果我们能将交流电机的数学模型做一定的转换与简化,使其靠近直流电机的数学模型,那么便会极大的减少对交流电机数学模型处理的任务量。
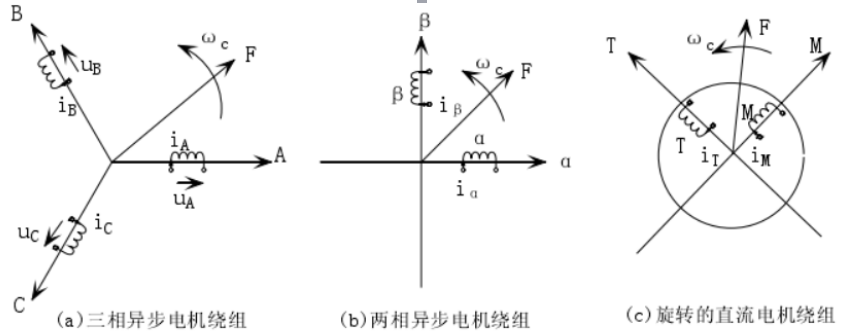
交流电动机与直流电机的不同之处在于,交流电动机是将交流电转变为机械能,它的定子绕组通入三相电流,在每个绕组线圈中产生磁场,这三个磁场得到一个旋转磁场,而转子绕组由于磁场变化感生出电流,而电流在与磁场的作用下产生作用力,从而进行旋转。其定子、转子产生的磁势在空间中都是同步旋转的,两者产生的磁势之间也是保持相对静止的。直流电机的物理模型图如2-2所示[11]。我们要做的就是利用坐标变换将感应电机的物理模型做适当处理,使其接近直流电机的物理模型,这样对感应电机模型的处理将会得到极大简化。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: