一种外骨骼机器手握力检测系统设计毕业论文
2020-04-09 14:09:30
摘 要
本文的主要内容是对外骨骼机器手的握力检测系统进行设计,该系统可以检测到多方位的握力大小以及方向,外骨骼机器手握力的大小以及方向是许多外骨骼功能实现需要的诸多数据之一。以下是各阶段的工作介绍:
- 首先是对外骨骼机器手握力的多向检测方法的研究:对于这个方面,需要能够检测出握力的方向和大小,本设计采用贴片式压力传感器检测握力的大小,而通过将贴片式压力传感器环绕分布的布局可以检测出握力大小变化的方向,由此基本实现了对外骨骼机器手握力的多向检测。
- 然后是进行以Arduino为核心的硬件设计:对于外骨骼机器手握力的大小和方向通过贴片式传感器采集,而对采集到的数据以及数据的前期处理如AD转换就是由以Arduino为核心的硬件系统来实现。通过这一阶段的工作,本文得到了各方向握力大小的初始数据。
- 最后是进行上位机的算法研究以及相应的程序设计:在本阶段收到了前面两个阶段所测得的数据,将这些数据传输到QT里面进行最后阶段的数据处理。本文研究了相关算法并设计了相关程序,最后在显示窗口将手掌各个部分的力分别显示出来,由此可以根据显示的握力数据进行系列研究。
关键词:外骨骼机器手;握力多向检测;Arduino;上位机
Abstract
The main content of this article is the description of the design of the grip force detection system for exoskeletal robotic hands. The system can detect the grip size and direction in multiple directions. The size and direction of exoskeleton robot grip force is one of the many data required for the realization of many exoskeleton functions. The following is the work introduction of each stage.
- The first is the study of the multi-directional detection method for hand grip of exoskeleton machines. For this aspect, it needs to be able to detect the direction and size of the grip force. The design uses a patch pressure sensor to measure the grip strength. By detecting the layout of the patch pressure sensor around the distribution, the direction of the change in grip strength can be detected. As a result, a multi-directional detection of the grip strength of the exoskeleton machine is basically achieved.
- Then it is hardware design with Arduino as the core. The size and direction of exoskeleton robot grip force is captured by a patch sensor. The collected data and its pre-processing such as AD conversion are implemented by hardware system with Arduino as the core. Through this stage of work, I got initial data on the size of grip in all directions.
- The last is the algorithm research of the upper computer and the corresponding programming. At this stage I received the data measured in the previous two phases. I transfer this data to QT for final stage data processing. Here I studied related algorithms and designed related procedures. Finally display the force of each part of the palm in the display window. This allows for a series of studies based on the displayed grip data
Key Words:Exoskeleton Robot;Grip force detection;Arduino;Upper computer
目 录
第1章 绪论 1
1.1国内外研究现状 1
1.2研究的目的和意义 2
1.3本文结构 3
第2章 握力多向检测方法的研究 4
2.1常规握力检测方法 4
2.2握力多向检测方法的研究 4
2.3本章小结 5
第3章 硬件设计 6
3.1传感器以及握把的选用 6
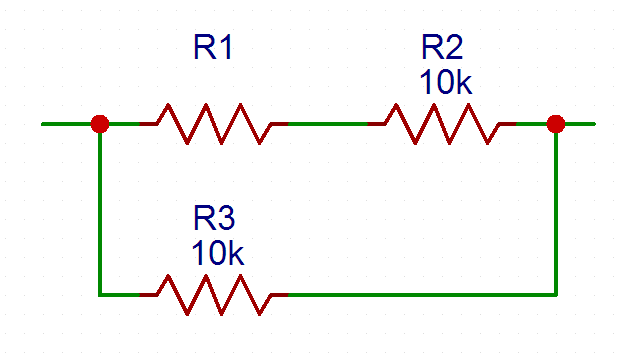
3.2传感器转换模块 8
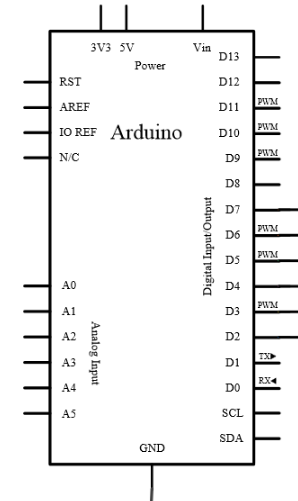
3.3单片机的选用 9
3.4本章小结 10
第4章 软件的使用以及算法的研究 11
4.1软件的选用 11
4.2算法的研究 11
4.3本章小结 13
第5章 实验 14
5.1硬件的连接 14
5.2实验演示 15
5.3本章小结 16
第6章 总结与展望 17
6.1对本设计的分析 17
6.2对本设计的展望 17
参考文献 18
致 谢 18
第1章 绪论
外骨骼机器人技术是一种融合了传感、控制、信息、融合以及移动计算,能够为操作者提供一种可穿戴式机械机构的综合技术。人类使用的外骨骼机器人可以应用到三大方面,即军事、民用以及医疗。从本质上来说,外骨骼设备就是将人类身体的力量和行动的速度放大到几倍甚至成百上千倍。根据现在科学技术的研究现状以及人类日新月异的生存生活的需要,可以对未来进行猜想:通过科学技术的不断发展,外骨骼设备会不断地更新换代,肯定能够发展到类似于人类日常所穿戴的衣服,不会对人类的日常生活行为造成阻碍,方便自己本身的行为动作,同时也能够根据人类自身的意愿,将人类动作的力量或者行动的速度放大,从而达到目的。举个例子,一辆汽车是十分沉重的,单独依靠人类自身的力量是不能够将它抬起来的,但是当穿戴上外骨骼设备之后,单独一个人就能够单独将这辆汽车举起来,伸直能够举着它行走或是奔跑。现在可以想象的到,在将来,外骨骼设备的应用领域是十分广阔的,比如军事、采矿、医疗等方面都能够运用上外骨骼设备。随着时代的发展,正是由于各个领域对人类身体机能的要求不断提高,甚至于远远超过了人体的极限,因此外骨骼设备对人类来说显得格外重要,在未来它将成为人类生活工作的必须品。而外骨骼机器手的握力检测是外骨骼设备能够正常平稳运行并且实现和谐的人机交互必须研究的一个项目。
1.1国内外研究现状
人体外骨骼设备的研究起源于美国,在1966年进行的哈德曼助力机器人的设想以及研发,然而直到今天,由于各方面的原因,外骨骼设备仍旧处于研发阶段。在能源方面,现代的能源供给装置并不能满足外骨骼设备的长时间运行,这个最主要的问题尚待解决;在人机协调方面,需要更多的时间以及各方面的实验研究来保证人机交互的和谐进行,否则可能会对人体造成伤害;而在此基础上的动作灵敏度以及准确度就更加需要长久的研发以及尝试性的实验分析。
在美国有一个军事合作项目,项目的产品是Raytheon Sarcos XOS,它是外骨骼设备最新水平的代表,在此项目中产生的“XOS”外骨骼设备是Steve Jacobsen博士最为得意的一件外骨骼设备。这种外骨骼设备的研发是为了提高军队士兵的能力,从而创造出超人一般的士兵,美国国防部高等研究计划局(DARPA)为了这项项目,在它所属的军事研究中提供了1000万美元的预算,再经过长达7年时间之久秘密研发,“XOS”外骨骼设备终于出世了,在机械外骨骼领域,它是最顶尖的科学技术的结合体,是当今时代的尖端科技结晶。“XOS”外骨骼设备对穿戴者行为的帮助是控制系统通过两个系统判断人即将做出的动作,从而决定如何对人体施加帮助。这两个系统就是检测系统和微机系统,而对人体施加帮助时,是通过液压系统将适当大小和速度的力产地给外骨骼设备的,不得不说的是,它是一个全身武装的外骨骼设备。相比于以前研发出来的外骨骼设备,“XOS”行动起来是十分灵敏的,与此同时他还能够提供强大的动力。为了使它能够对人类身体的动作实时地做出反应,需要在身体上贴附一些传感器,由此它可以几乎无延迟地对身体的动作做出反应,输出强大的力量。通过穿戴“XOS”外骨骼设备,能够让人类在举起重量在90kg的东西的时候,只感觉到它9kg的重量,并且这一动作能够重复进行50-500次。但是还是目前科技水平的一个通病,由于能源方面没有大的突破,因此“XOS”的使用时长比较短,它自带的电池只能够支持它40分钟的使用时长,相信如果能够把能源问题解决处理好,那么它就能够走向普遍实用化。
在此之前中国的一家公司Dexta也进行了外骨骼设备的研究,并研发出了一款新的外骨骼设备—Dexmo,该公司研发这个外骨骼设备的原因是为了能够将虚拟世界进行更加完整还原,给人类更加真实的体验,而它在被研发中被赋予的能够捕捉到人体的手部的动作就是实现该功能的条件之一。从表面上看, Dexmo的外部形状比较奇异,看上去像是对人做出的让人痛苦万分的刑罚,却又科技感十足。Dexmo对人体手部动作的捕捉是通过采用机械师的捕捉方案来实现的,方案中,外骨骼设备被设计成手部外骨骼的形状,并安置上了一组连杆连接到旋转传感器上,当手部进行弯曲动作的时候,连杆可以将该动作进行分解并将其映射到传感器上,从而能够通过计算得出手部在动作之后的位置和形态,这样这个机械结构就成功的捕捉到了人体手部的动作。在穿戴它的时候,它和人体的手指是紧密贴合的,这样能够使它充分地检测到手掌以及手指的动作。据说Dexmo外骨骼设备有两个型号,分别是经典版和F2版,当玩家在虚拟世界玩的时候,它们能够为玩家模拟动作,而且还能够对机械装置进行操作。Dexta公司里面的机器人研发小组表示,穿戴上Dexmo外骨骼设备之后,不仅能够控制机器人的手部动作,而且在使用中,还能够全方位的感受到反馈力。除此之外,这个外骨骼设备还有一些其他的功能,比如充当遥控装置。在Dexmo外骨骼设备上,搭载了一些不同的应用程序,这是为了方便进行更多的研发与测试。这套外骨骼设备研发出来之后,它在研发测试过程中积累的原始句和SDK对于此领域的开发人员来说,是最为宝贵的资源。
1.2研究的目的和意义
随着科学技术的不断发展,工业、制造业等行业对机械手的需求也不断提高,如今,机械手的应用领域十分宽阔。想像一下,一个通过远程操作的机械手能够精确地模拟人类操作者的手部动作——将物体抓起来,进行各种操控,并且,能够在十分危险的工作环境替代人类进行工作。同时,这样可以避免外骨骼设备对人体手部造成压力伤害。
本文主要是从以下几个方面着手进行设计的:
1.首先是对外骨骼机器手握力的多向检测方法的研究,本文从常规握力计方面入手,对握力检测系统进行研究,寻找出适合本设计的检测方法。
2.然后是对设计中需要使用到的硬件进行挑选和使用,本设计需要进行数据处理,因此可以从单片机入手,并以此为硬件核心,从而搭建一个完整的硬件系统。
3.最后是算法的研究和软件的编程,通过第一阶段的研究,得出了本设计握力检测的方法,由此可以研究出本设计中需要使用到的算法,再使用计算机软件进行编程,将整个设计整合到一起,从而完成本设计。
1.3本文结构
本文正文分为六个章节,其中第一章为绪论,介绍了与本设计相关的国内外研究现状,本设计的研究目的和意义以及本文结构内容的简介。第二章是对握力检测系统的检测方法进行研究,通过和常规握力检测方法进行对比,研究出了一个适合本设计的握力检测方法。第三章对本设计需要用到的硬件进行了选用,确定了以Arduino为核心的硬件系统,选用了RFP-602薄膜式压力传感器进行握力的检测以及设计了传感器的转换模块。第四章介绍了本设计使用的软件和算法,使用Arduino IDE和QT编写握力检测系统的程序,对本设计的算法进行了推演运算。第五章是对本设计做出来的成品进行实验,介绍了本设计的各个部分的关联,也通过实验得到了一些握力数据。第六章是对本文的总结和对本次设计的展望,总结了本设计的工作任务,对做出来的东西进行了分析,也对本设计的未来做出来展望。
第2章 握力多向检测方法的研究
2.1常规握力检测方法
在日常生活中,人们经常需要用到自己的握力,但是大家对于自己的握力的关注并不多,大部分人都知道握力,却没有认真研究过它,就连一次像样的握力检测都没有进行过。
随着人们生活水平的不断提高,人们对自身身体的健康状况也在持续加强关注,为了增强自身的体魄,很多人会选择去户外或者去健身房健身,而这些通过运动器材能够了解自己身体的状况,在此,大部分人都会进行握力检测,由此来确定自己的力量大小。他们所使用的握力检测装置大致可以分为两种:弹簧握力计和电子握力计。弹簧握力计测量握力的原理是胡克定律,而电子握力计测量握力是利用的电子处理。两种握力计的外观图如下图2.1和图2.2所示:

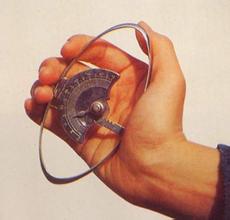
图2.1 弹簧握力计 图2.2 电子握力计
现在已经很少使用弹簧握力计了,一般情况下都是使用的电子握力计,使用电子握力计测量握力时,因为它的内部使用了微电脑技术,采集的信号经过内部芯片的处理,显示出来的数据稳定可靠,而且能够清晰地显示出来,不仅如此,电子握力计能够让人连续测量,它的体积较小,方便使用者携带。
2.2握力多向检测方法的研究
可以看到,常规的电子握力计的使用需要人用手握住设计好的握把,以此来使用它测量自身的握力。但是,握力计这样的设计并不是很理想,如图2.2所示,测量握力的时候,测试者需要用手拉住测力计的握把,然后使劲握紧,从而拉动握把,将自身的握力测出来。这样的方案设计就把这个握力计的使用方式限定住了,只能将手掌放置在设计好的位置上才能测得握力。而且在测量握力的时候,手的发力位置也是被限定的,当测试者用力握紧测量握力的时候,需要他为自己的手掌找一个合适的姿态,能够让他的手尽可能的将其最大的握力发挥出来。
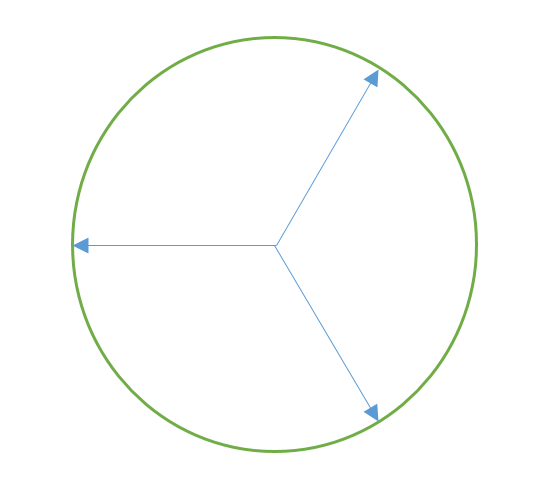
可以考虑对握力计重新进行设计,使它能够更好更方便地被使用,于是,握力的多向检测方法的研究开始了。考虑到对握力的测量需要多向检测,那么握力计的外形设计应该从球体开始衍生,因为球体的形态是很特殊的,它可以完全满足力的多向检测。由球体的结构,再考虑到人体手部测量的时候的抓握姿势,查阅了人机交互硬件设备的相关资料之后,将握力计的结构设计成了圆柱体。如下图图2.3所示。圆柱体的曲面侧面的结构十分适合握力的多向检测,而且圆柱体的结构也方便手部的抓握,这个结构设计是满足本次设计的要求的。结构设计好了之后,需要考虑握力的检测方法,对于在圆柱体曲面侧面检测握力,压力传感器是最好的选择,但是一般的应变片传感器并不能在圆柱体的曲面上使用。经过对压力传感器的不断查找,以及询问导师相关信息之后,一款薄膜压力传感器被找了出来,经过研究对比之后,可以确定,这个传感器能够满足在圆柱体曲面侧面测量握力的要求。
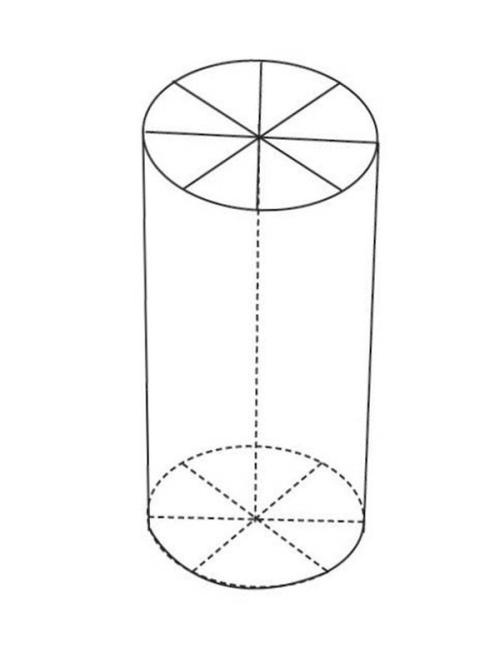
图3.3 圆柱体
2.3本章小结
本章介绍了当前生活中常用的握力计,而这些握力计的设计还可以进行优化,握力检测的方法也能够进行提升。通过研究发现,得出了一种握力的多向检测方法,在对它进行了一些简单的理论论证,以及对现代硬件条件进行了解之后,可以知道,这个方法是可行的。
第3章 硬件设计
3.1传感器以及握把的选用
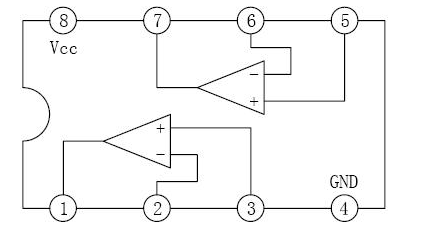
由上文可知,一款薄膜压力传感器已经被找到了,而且能够满足本次设计的使用要求。这款传感器就是RFP-602,它是一款压阻超薄触觉传感器,属于RFP薄膜式压力李传感器,如图3.1所示。

图3.1 RFP薄膜式压力传感器
RFP薄膜式压力传感器是由宇博智能科技有限公司研发出来的,这种传感器非常薄,厚度只有0.1mm-0.2mm,而且它拥有很好的柔性,所以,它对测量压力的接触面的要求极低,为使用者测量各种不同的接触面之间的压力提供了极大的便利。对比以往的压力测量方法,该传感器在测量压力分布测量的时候,显得更加经济、效率、准确、迅速和方便。将导体和半导体铺设在两片很薄的聚酯薄膜内表面,这两片薄膜就组成了一个标准的RFP压力传感器,它同时满足静态以及动态的压力测量。
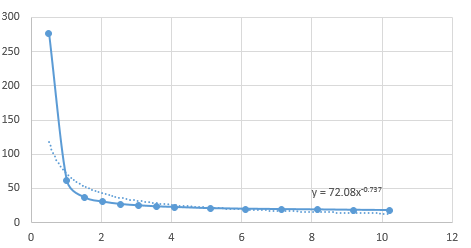
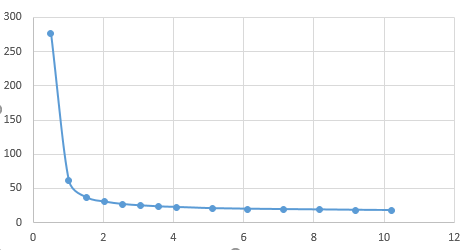
当有压力施加到传感器的感应区域的时候,薄膜压力传感器能够将其转换成电阻信号,由此,可以根据对感应区域施加的力的变化的信息得到力-电阻的关系变化曲线。当感应区域的压力为零时,传感器的阻值最大,而受到的压力越大,传感器的阻值就会变的越小。本次设计采用的RFP-602传感器的力-电阻关系变化表如表3.1所示。
通过将RFP薄膜传感器以不同的密度放置到不同的区域,就能够实现对各种空间分辨率的压力测量,而传感器的不同面积更是能够满足这类测量要求,如图3.2所示。因此,可以在圆柱体上选取不同的区域,将RFP-602传感器贴附到圆柱体上,由此就可以实现对握力的多向测量,传感器使用的越多,测量的精确度就越高。考虑到成本,工作复杂程度等方面的问题,本次设计中使用了6片RFP-602薄膜传感器进行试验。
 表3.1 RFP-602力-电阻关系变化表
表3.1 RFP-602力-电阻关系变化表
荷载kg | 电阻KΩ |
0.510204 | 277 |
1.020408 | 60.9 |
1.530612 | 36.4 |
2.040816 | 30.22 |
2.55102 | 26.68 |
3.061224 | 24.71 |
3.571429 | 23.22 |
4.081633 | 22.36 |
5.102041 | 20.58 |
6.122449 | 19.79 |
7.142857 | 19.26 |
8.163265 | 18.74 |
9.183673 | 18.23 |
10.20408 | 17.8 |
图3.2 RFP传感器大小对比图
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: