基于自主循迹的智能灭火小车设计毕业论文
2020-04-10 16:12:00
摘 要
基于自主循迹的智能灭火车,在工业自动化厂房仓库等地的火灾检测与消除具备较好的运用前景。
本文设计了基于红外循迹技术的自主循迹灭火小车,本文的主要工作如下:(1)分析了国内外智能消防灭火车的现状和需求;(2)针对循迹巡逻与自动回归轨迹的需求,进行了红外循迹阵列及车体姿态辨别方案的设计;(3)针对火焰识别的需求,进行了红外火焰传感器阵列及车体方向调整方案的设计;(4)基于PWM调速原理设计了电机控制硬件平台,包括电机转向,转速的调节方法;(5)进行了整体循迹灭火方案的程序设计与编写;(6)进行了小车的制作与相关测试实验。
主要创新点:自主循迹灭火小车具有自主离轨与自主回轨功能,实现了最远距离60cm的火焰探测与熄灭。
关键词:循迹;火焰识别;智能车;脉冲宽度调制
Abstract
Intelligent fire fighting vehicle based on autonomous tracking has good prospects for fire detection and elimination in industrial automation workshop and warehouse.
A self tracking fire fighting vehicle based on infrared tracking technology is designed in this paper. The main work of this paper is as follows: (1)The status and demand of intelligent fire fighting car at home and abroad are analyzed; (2)Aiming at the requirement of tracking patrols and automatic regression trajectories, the design of infrared tracking array and car body posture discrimination scheme is carried out.(3) Aiming at the requirement of flame recognition, the design of infrared flame sensor array and car body orientation adjustment is carried out.(4)Based on the principle of PWM speed regulation, the hardware platform of motor control is designed, including motor steering and speed regulation.(5)The overall tracking and fire fighting plan is programmed and written.(6)The production of the vehicle and the related test experiments were carried out.
Main innovation points:This self tracking fire fighting vehicle has the function of independent orbit and independent rail return . The fire detection and suppression of the longest distance 70cm is realized.
Key words: Tracking; flame recognition; intelligent vehicle;PWM
目录
第1章 绪论 1
1.1研究背景 1
1.2国内外研究现状 1
1.3课题研究内容 2
1.4 研究目标 2
第2章 方案设计 3
2.1方案分析 3
2.2总体方案 3
第3章 硬件设计 4
3.1单片机最小系统设计 4
3.1.1单片机选型 4
3.1.2单片机最小系统 5
3.2寻迹模块 5
3.2.1寻迹模块选型 5
3.2.2寻迹模块电路 7
3.3火焰传感器模块 7
3.3.1火焰传感器选型 7
3.3.2火焰传感器电路 8
3.4小车底盘 9
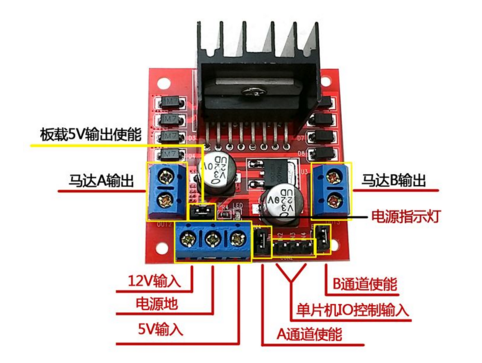
3.5 电机驱动模块 10
3.5.1电机驱动模块选型 10
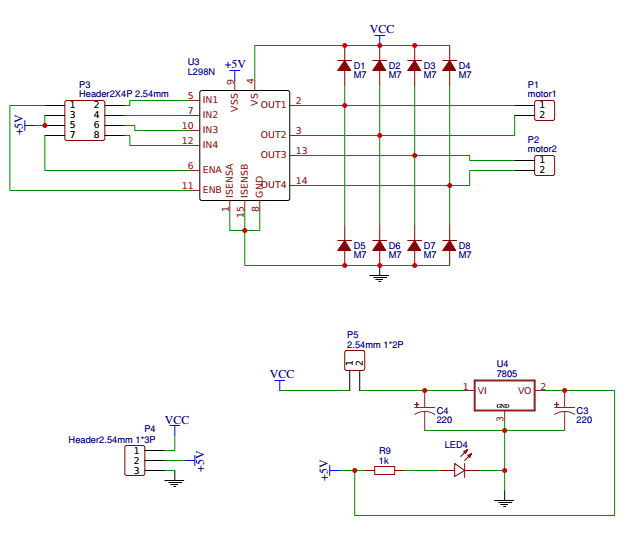
3.5.2 L298N电机驱动模块电路 12
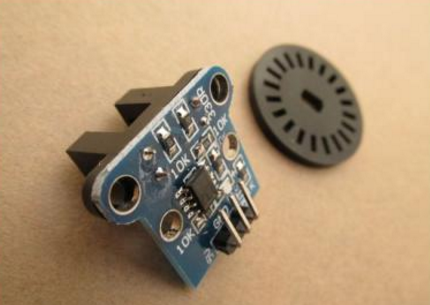
3.6测速模块 12
3.6.1测速模块选型 12
3.6.2测速模块电路 13
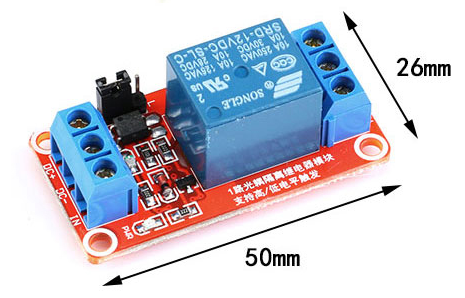
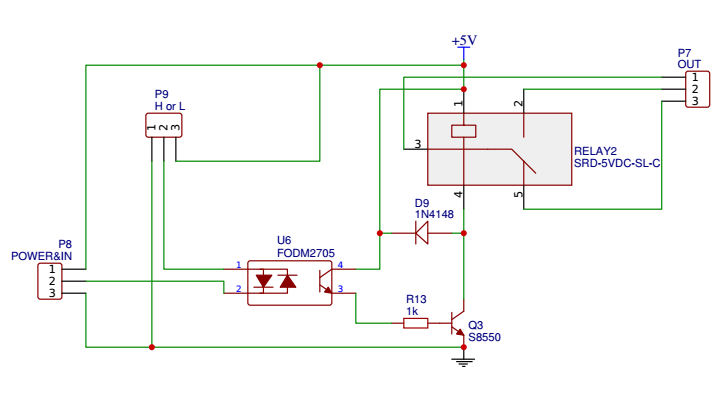
3.7继电器与风扇 14
3.7.1继电器选型 14
3.7.2继电器模块电路 15
3.7.3风扇电机选型 15
3.8 AD转换器及外围电路 16
3.8.1 ADC0804简介 16
3.8.2 ADC0804外围电路 17
3.9 各模块与单片机连接 17
第4章 程序设计 18
4.1系统程序结构 18
4.2重要子程序 19
4.2.1 PWM调速 19
4.2.2 车轮控制程序 20
4.3循迹程序 21
4.3.1姿态判断与纠正 21
4.3.2循迹程序流程 23
4.4方向调整程序 24
4.5朝火焰前进程序 25
4.5.1小车直线前进程序 25
4.5.2读ad值程序 26
4.6灭火程序 28
4.7 倒车回轨迹程序 29
第5章 实物成果 30
5.1实物简介 30
5.2测试实验 31
5.2.1 火焰传感器灵敏度实验 31
5.2.2灭火成功率实验 31
5.2.3回轨迹成功率实验 33
5.2.4全功能测试 33
第六章 总结 34
6.1工作总结 34
6.2心得体会 34
参考文献 35
附录 36
附录A 36
附A1单片机最小系统电路原理图 36
附A2寻迹模块电路原理图 36
附A3火焰传感器模块电路原理图 36
附A4 电机驱动模块电路原理图 36
附A5 测速模块电路原理图 36
附A6 继电器模块电路原理图 36
附A7 ADC0804外围电路原理图 36
附录B程序清单 36
致谢 37
第1章 绪论
1.1研究背景
近年来,随着科学技术的迅速发展,智能化技术取得了很大的发展。机器人是一项典型的智能化产品,它综合了各个领域和学科,包括计算机、电子、机械等。
消防智能灭火车是一种特种机器人,在现代社会的火灾抢险救援中发挥越来越大的作用。随着各种大型石油化工企业、码头、厂房、仓库、隧道等不断增多,由油品燃气、化学原料、易燃工业品,等引发的火灾事故不断增加。智能灭火车能作为一种移动式的火焰检测及灭火装置,可以全天候替代人员在厂区库房等地进行有计划的巡逻,及时发现火灾隐患并自行灭火。除此之外智能灭火还车能进入高温、有毒、缺氧、浓烟等危险灾害事故现场进行数据采集、处理。智能灭火车的研发生产与投入使用将会极大地帮助工作人员分析消防现场状况,并可以针对特别紧急与危险的状况进行相应的处理,如此,将大大减少消防人员在执勤过程中的危险。智能灭火车的智能灭火,主要体现在其携带的传感器可帮助其自主确定火源位置,而后完成对火焰的扑灭工作。智能灭火车在厂房、仓库等地方的布置,可以有效的起到预防火灾,及时处理小型火灾的作用,保障消防安全。
1.2国内外研究现状
国外,最早是由一些发达国家开始对智能消防灭火车的应用进行研究,例如美国美国、前苏联、日本、英国、德国等国家。目前,智能化的程度方面,智能消防灭火车分为两个发展阶段,即可以将其划分为两代产品,第一代主要是通过遥控方式控制消防灭火车进行实际作业,消防灭火车主要还是作为一个工具被使用人员操控着;第二代则被称为智能化消防灭火车,这类智能化消防灭火车可以在离开人员的控制下自主工作,它们会按照既定的轨迹进行巡逻,会根据身上携带的多种传感器对火灾情况进行判断,并作出相应的报警与灭火处理。
发达国家目前对智能消防灭火车的研发目前正处于第一代产品,以及第二代低端产品,与第一代消防灭火车相比,第二代消防灭火车则具有很多智能化的功能,它不再是操作者的“傀儡”,而是自己根据现场环境产生相应的判断进而采取相应的措施。目前智能灭火车使用规模最大的国家是日本,早在上世纪80年代初期,智能消防车就已经在东京、大阪、高石、太田、蒲田等消防部门投入使用。这几款日本研发的消防车主要采用内燃机或电动机提供动力,大规模采用履带式传动系统,爬坡、爬楼梯、跨越障碍能力强;同时车身装有大流量的消防水枪,能自由调整喷射方向和角度;并且装有各种传感器以及摄像头,方便实时监测火场内部情况;并且能通过无线通信传递数据,接收指令。
中国起步较晚,自上世纪90年代才开始着手研制智能消防灭火车。1995年由公安部上海消防科学研究所着手研制的我国第一台消防智能车“自行式消防炮”诞生,标志着中国智能消防车的发展也进入了战略发展阶段。随着科技产业的不断发展,近年来智能消防车的发展得到了国家有关部门的大力支持。
总体而言,我国消防智能车的研究与开发仍处于落后的阶段。乃至全世界,第二代智能消防灭火车的研制也未能达到高水平。想要让消防智能车真正的用于火灾现场,还有很长的路要走。
1.3课题研究内容
本次毕业设计的主要内容是以灭火小车为原型实验和验证智能消防灭火车的可行性。
收集与分析资料,了解所需基于智能灭火车的功能要求;掌握单片机的基本原理、特点、应用领域;研究智能灭火小车的基本构成,分析其各个功能模块的需求;设计基于单片机的电机控制器硬件平台;设计数据处理算法、制定软件流程,编写相关软件代码;以烛火为火源,分析与测试小车功能的有效性。
1.4 研究目标
1、实现智能灭火小车按轨迹巡逻;
2、实现智能灭火小车识别区域内火焰,辨别与调整方向并前进到合适位置,执行灭火任务;
3、实现智能灭火小车自动回轨迹并回到巡逻状态。
第2章 方案设计
2.1方案分析
1、作为一个智能车,首先需要它的“大脑”,即单片机。
2、作为一个智能车,需要一个小车底盘,以及配套的电机,轮子等。
3、循迹功能的实现需要循迹传感器模块来采集信息。
4、识别火焰的功能实现需要火焰传感器来采集信息。
5、判断与火焰不断变化的距离需要对模拟量进行转换,需要ad转换模块。
6、微处理器不能直接驱动电机,因此需要电机驱动模块。
7、灭火功能的实现需要灭火装置,以及控制其开关的继电器模块。
2.2总体方案
经分析,本设计采用单片机作为控制器,以循迹模块阵列采集路面轨迹信息,以火焰识别模块阵列采集火焰信息,并以ad转换处理火焰传感器模拟量数据,以电机驱动模块为单片机控制车轮电机提供桥梁,以继电器来驱动风扇灭火装置。单片机接收到寻迹模块阵列信息后进行相应处理,控制电机驱动模块,驱动车轮电机,使得小车可以跟踪白底上的黑线行走;在接收火焰识别模块阵列的信息后单片机进行相应的处理控制车轮的转向和行进,火焰传感器的模拟输出接入ad转换之后再给单片机进行处理,分析控制车子与火焰的距离。单片机控制继电器打开风扇,完成吹灭火焰的操作。
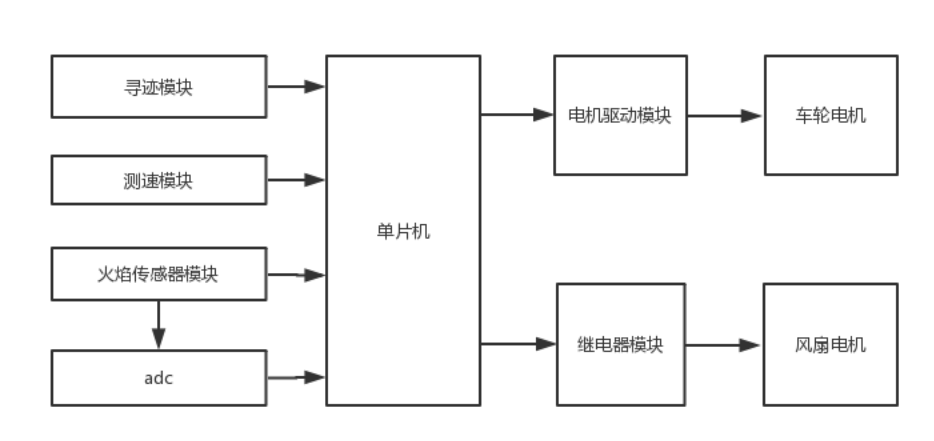
图2.1总体方案框图
第3章 硬件设计
3.1单片机最小系统设计
3.1.1单片机选型
本次设计采用宏晶科技STC89C52RC单片机作为控制系统的核心。
STC89C52RC 是一种低功耗、高性能CMOS8位微控制器,具有8K在系统可编程Flash存储器。使用高密度非易失性存储器技术制造,与工业80C51产品指令和引脚完全兼容。在单芯片上,拥有灵巧的8位CPU和在线系统可编程Flash,使得STC89C52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。
STC89C52具有以下标准功能:8k字节Flash,256字节RAM,32位I/O 口线,看门狗定时器,2个数据指针,三个16位定时器/计数器,两个外部中断,全双工串行口。
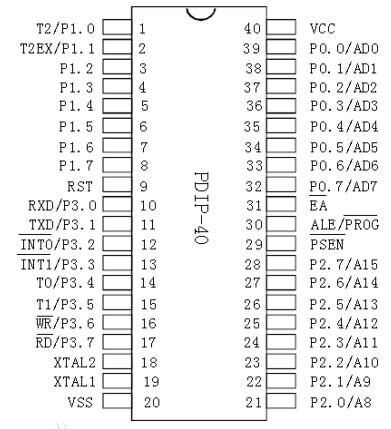
图3.1 STC89C52RC引脚分配图
3.1.2单片机最小系统
单片机最小系统包括电源,晶振电路和复位电路。
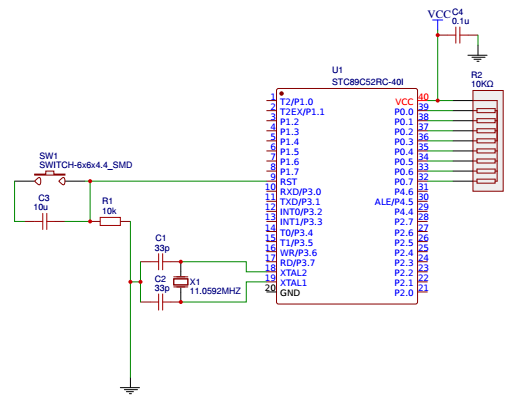
图3.2单片机最小系统电路
3.2寻迹模块
3.2.1寻迹模块选型
循迹方式主要有红外循迹、电磁循迹、线性ccd循迹三种方式,后两者虽然精度高,可以更好地识别路径,但是对于单片机的要求高以及成本很高。而红外循迹原理简单,依靠地面灰度的不同,黑色吸收红外光,白色反射红外光,这两者不同情况即对应输出不同的io信号,可以识别黑白线,辅以红外循迹阵列,也可以达到比较好的循迹效果。
本次设计采用TCRT5000红外反式射传感器模块。 TCRT5000一种集发射与接收于一体的光电传感器,它由一个红外发光二极管和一个NPN红外光电三极管组成。该模块使用74HC14施密特触发反相器处理TCRT5000的模拟电压信号,信号干净,驱动能力强。工作时TCRT5000传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,施密特触发反相器接收端接收电压模拟量大于正向输入阀值电压, 此时模块的输出端为低电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,此时施密特触发反相器接收端接收电压模拟量低于负向输入阀值电压,模块的输出端为高电平,指示二极管被点亮。

图3.3 TCRT5000红外反射传感器

图3.4 TCRT5000红外反射传感器模块
3.2.2寻迹模块电路
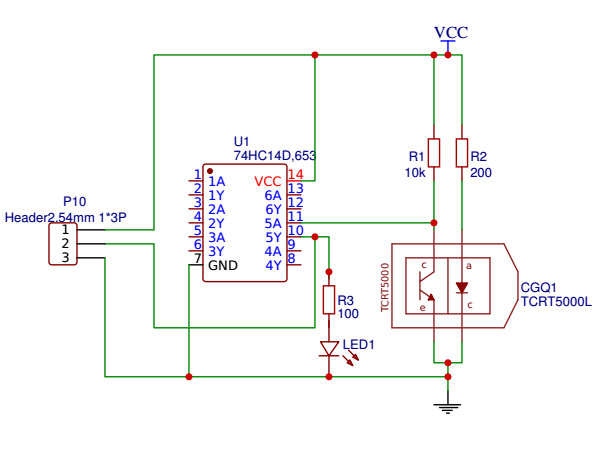
图3.5 TCRT5000红外反射传感器模块电路图
3.3火焰传感器模块
3.3.1火焰传感器选型
检测火焰可用的传感器有烟雾传感器、温度传感器、紫外传感器、红外传感器、以及CCD传感器等。因本设计使用蜡烛模拟火源,对环境温度影响小,而且烟雾少,所以排除了温度传感器、烟雾传感器。考虑到CCD传感器对MCU的要求极高,应用难度高,排除了CCD传感器。紫外线传感器只对185~260NM狭窄范围内的紫外线进行响应,而对其它频谱范围的光线不敏感,可以通过对火焰中的紫外线进行检测实现火焰识别,具有灵敏度高、抗干扰性强的特点。缺点是价格高,是红外传感器的几十上百倍。红外火焰传感器可以用来探测火源或其它一些波长在 760 纳米~1100纳米范围内的热源。它可以对燃烧时发出大量红外光进行检测,对普通光也有反应,对火焰光最为敏感。红外火焰传感器虽然价格很低,但是容易受到外界光的干扰,尤其是太阳光。
考虑到需要多路火焰传感器组成阵列,所以价格不能太高,因此采用红外传感器识别火焰,并采取相应措施排除太阳光等干扰。本次采用的红外火焰传感器可输出数字IO量和模拟量,输出口分别为D0和A0。接收的火焰光越强,红外光电三极管越接近饱和,此时模拟输出口的电压越低;火焰光越弱,模拟输出口的电压越高。模拟量输出为0~5V。通过LM393将模拟输出与阀值电压比较,当A0小于阀值电压,D0为低电平,指示灯亮起,此时代表探测到火焰。当A0大于阀值电压,D0为高电平,指示灯熄灭,此时代表未探测到火焰。阀值电压可以通过可调电阻调节,即可以调火焰传感器感受火焰的灵敏度。
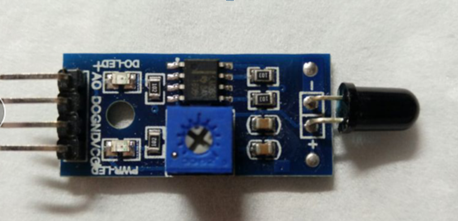
图3.6 红外火焰传感器模块
3.3.2火焰传感器电路
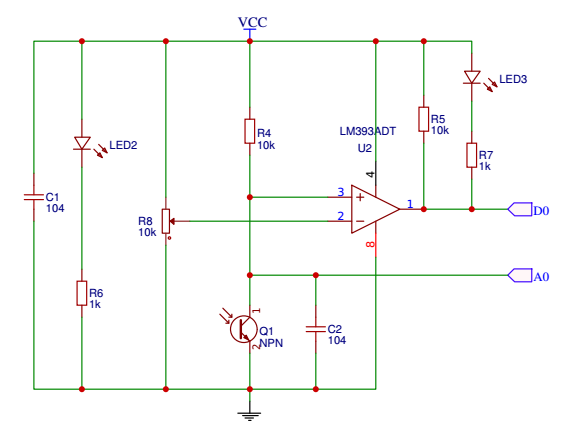
图3.6 红外火焰传感器模块电路
3.4小车底盘
目前市场上的智能车底盘大致分为以下几种:
差速双驱三轮:
这种类型的小车底盘是市面上最为广泛的一种,其采用两个同规格电机对称分布在车体前方两侧,在车体尾部安装一个万向轮或牛眼轮作为从动轮。这种车体具有转向灵活的特点,双电机控制相对简单并且省电,而且其价格是智能车底盘中最便宜的。缺点就是在开环控制下走直线很难,左右电机的个体差异会导致转速的不同,要想走直线就必须控制左右车轮转速相同,必须要加闭环控制。
差速四驱四轮:
这种类型的小车地盘采用四个同规格的减速电机对称分布在车体的前后左右。使用时一般将左侧和右侧两组电机分别并联控制,即保持左侧两个电机速度相同,右侧两个电机速度也相同。需要转向时,给左侧和右侧速度一个差异即可转向,这种车体转向灵活性差一些,转向时,四个轮子同时也在打滑,当地面阻力较大时会使得转向变困难,但是也带来一种好处就是走直线比较容易。四驱动力更强但也更耗电些。
差速双驱履带:
这种类型的小车地盘一般都有金属车体,左右各有一个减速电机带动一个主动轮,配合上若干负重轮,形成履带传动,履带也有金属和塑料两种。这种底盘最突出的优点就是越野能力强,差动双驱的结构也导致其走直线较难,但其转向阻力对此有些许弥补。
四轮舵机转向:
这种类型的小车底盘和常见的遥控玩具车类似,前面两个轮子是从动轮,由舵机控制转向,后面两个轮子作为驱动轮。其转向的方式使得转向平滑,但是角度有限制,需要一定的转弯半径,无法方便地在狭小的空间调整方向。这种底盘非常适合用在需要快速行驶的开阔地带。
全向轮:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: